一种可折叠的物流配送飞行汽车的设计、控制和验证*
2021-12-04曹沐凡王志伟林锦路沈思明高坚
曹沐凡,王志伟,林锦路,沈思明,高坚
(中国计量大学机电工程学院,浙江杭州 310002)
本项目核心任务在于实现飞行装置的折叠以节省空间以及使其具有识别路况、规划路线的功能。
1 飞行汽车结构设计
1.1 整机结构尺寸设计
本项目主要目的为制作一台可折叠的飞行汽车功能验证机,因此尺寸不宜过大。依据研究条件选择四旋翼构型满足飞行功能,整体结构布局为下方为车辆部分,上方为四旋翼飞行器部分,二者刚性连接。电机对角轴距暂定为800 mm,桨叶尺寸为12 寸(折合304.8 mm),车身宽度最大为800/-304.8=260.89 mm,冗余取为250 mm。考虑到车身承载容量,取车长为500 mm,车轮可选轴距为330 mm、270 mm、210 mm,可根据车轮电机安装孔位调整。12 寸螺旋桨配合700 kV 无刷电机,使用6S 锂聚合物电池,供电动力约为3 000 g,整机动力约12 kg,按照四旋翼飞行器经济动力配比,整机质量应约为33.3%的动力(即满足悬停姿态),因此整机质量(含电池和设计冗余运载)控制在4 kg 以下。
1.2 机械结构设计
整机的机械结构具体为其旋翼机臂折叠机构,要求折叠后使整机外观尺寸较小,贴近其车体尺寸,提高地面通过性。折叠后整机长宽控制在600 mm×400 mm 以内(含螺旋桨),比较符合车辆尺寸。
机臂折叠方案有以下两种。
方案一为机臂连接处使用折叠管座。图1 为现在多轴无人机常用的折叠管座,该方案优点是结构简单可靠,缺点是车体不满足竖直折叠,且水平折叠不符合管座设计受力方向;展开较麻烦,需手动依次展开,难以进行自动化改装。

图1 折叠管座示例
方案二为机臂使用整体机械折叠机构。该方案目的在于解决方案1 中的折叠问题。机臂只能水平折叠,使所有机臂共面,便于设计平面运动机构(结构较为简单,可靠性高)。图2 为机构运动方案简图。综上,选择方案二作为折叠方案。机构中央滑动副使用导轨滑块,机臂滑动副使用滑动直线轴承套于碳纤维圆柱机臂上,滑动直线轴承通过附加零件连接其上的附加转动副,其余转点均使用立式轴承座实现。
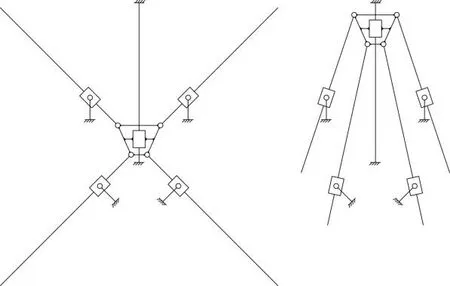
图2 等比例折叠机构运动简图
1.3 机臂力学分析
机臂包含运动机构,而且直接将电机的动力传导给机架,此处受力应当着重分析。结合图2 分析,前后机臂简化力学模型如图3 所示。

图3 机臂力学模型示意图
分析过程较为简单,步骤略。结果显示前机臂靠外侧轴承转点承受轴向力最大。对轴承D 进行静强度校核,轴承D只受到轴向力Fa=126.96 N,需折算为当量静载荷P0=Y0Fa,查表取Y0=0.5,取静强度安全系数S0=1.5,计算得S0P0=95.22 N,查询轴承手册,C0=1 370 N,强度校核满足条件。
2 飞行汽车控制系统设计
2.1 飞行控制系统设计
使用PID 闭环控制算法对飞行器进行稳态控制,算法流程如图4 所示。
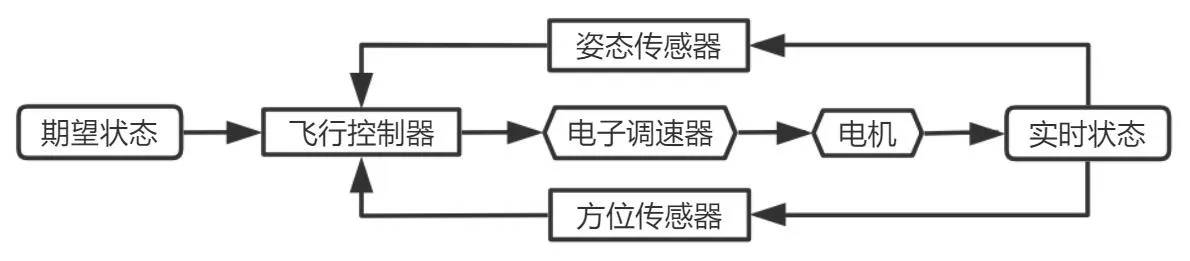
图4 飞行控制算法流程图
自动飞行使用目前无人机常用的Mission Planner 地面站搭配相关硬件实现按照规划航线自动飞行。地面站基础操作界面如图5 所示。
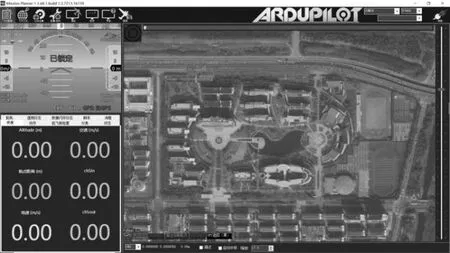
图5 地面站操作界面图
2.2 运输控制系统设计
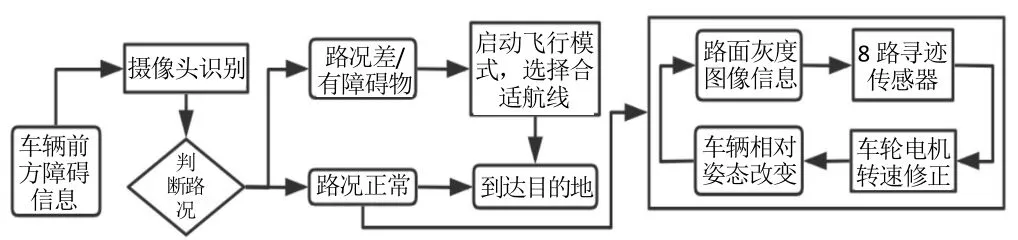
图6 运输算法流程图
3 实物图与硬件选型
3.1 总体实物图
整机折叠状态实物和机臂折叠状态部分实物分别如图7和图8 所示。

图7 整机折叠状态实物图

图8 机臂折叠状态部分实物图
3.2 硬件选型
螺旋桨:朗宇EOLO CN1555 碳纤复合材料多旋翼无人机正反螺旋桨。
飞行电机:T-motor MN3508 多旋翼盘式无刷电机。
电子调速器:T-motor AIR40A。
锂电池:格氏ACE 3300mAh 3S 11.1V 25C 锂聚合物电池。
4 飞行汽车设计功能验证
无人机进行外场飞行测试中,整机(含电池)携带1.5 kg额外负载总重4 901.4 g,起飞时油门位于最大油门的1/3 处左右。手动飞行未加装GPS 时,使用陀螺仪悬停,漂移速度在0.1 m/s 左右。
外场飞行测试和外场寻线行驶测试分别如图9 和图10所示。

图9 外场飞行测试

图10 外场寻线行驶测试
由于整机重心位于动力中心下方,飞行稳定特性为静稳定型,可减小飞控负载。加装GPS 和RTK 差分定位模块后,悬停由于存在位置闭环反馈修正,悬停精度可达到2 cm 级别。携带1 kg 额外负载,按照设定航线飞行时,在保证航点准确度的前提下最高速度可达13.5 m/s。按设计巡航速度(9 m/s)飞行,续航时间可达12 min。
地面模式下,进行了67 次100 m 巡线测试。地面最大行程为7.5 km,路线丢失率为1.67%,丢失路线的原因主要是环境光照较强,导致寻迹传感器感受的灰度信息对比度低于传感器死区阈值,需通过更换灵敏度更高的传感器或者加装浮动遮光罩(适应路况)来解决。
实验结果表明,这种可折叠的小型旋翼型无人飞行汽车由于可以行驶,能量利用率大大提高,在智能判断路况满足行驶条件时无需花费额外的能量悬停,有利于提高无人物流配送的效率。
