基于光学辅助指向测量的太赫兹望远镜指向误差模型研究*
2021-12-03应晓科左营喜
应晓科 娄 铮 刘 伟 左营喜
(1中国科学院紫金山天文台南京210023)
(2中国科学院射电天文重点实验室南京210023)
(3中国科学技术大学天文与空间科学学院合肥230026)
1 引言
相对于低频段的射电望远镜,工作在毫米波、亚毫米波长上的太赫兹望远镜一般具有更高的指向和跟踪精度要求.例如,南极5 m太赫兹望远镜(The 5 m Dome A Terahertz Explorer,DATE5)主波束宽度10′′-17′′,要求实现2′′的指向精度[1].下一代大口径亚毫米波望远镜更是要求实现亚角秒级的指向跟踪精度.另一方面,天文望远镜常规利用指向修正模型对系统性的指向偏差进行校正.为了建立高精度的指向模型,需要在全天范围内对大量天文点源目标进行观测.射电望远镜通常采用“十字扫描法”对强射电点源在方位和俯仰方向进行扫描,从而获得天线指向的准确测量[2-6].与光学波段和低频率射电波段不同的是,太赫兹波段可用于观测的点源比较稀缺,且无法覆盖全天,难以像低频波段那样直接通过观测点源目标来建立高精度误差指向模型,使得这种传统指向测量方法无法满足太赫兹波段望远镜的指向精度要求.
针对上述主要技术困难,本文研究了利用与太赫兹天线共轴的小型光学望远镜来辅助太赫兹望远镜指向测量以及建立指向误差修正模型的方法.该方法是利用安装在太赫兹天线背架上的小口径光学望远镜观测光学波段的点源目标,从而通过丰富的光学点源目标来测量指向误差,解决太赫兹望远镜在指向测量时面临的太赫兹点源目标不足的问题.该技术在国外望远镜上已有尝试,例如32 m VLBI(Very Long Baseline Interferometry)天线安装远程控制的光学望远镜,用于射电天线的指向和跟踪[7];ALMA(Atacama Large Millimeter/submillimeter Array)天线借助了光学指向望远镜系统来辅助和验证毫米波亚毫米波段的指向测量[8];而计划建造的CCAT(Cornell Caltech Atacama Telescope)也准备利用小光学望远镜来辅助进行指向误差的测量[9].
本文依托紫金山天文台一台1.2 m口径斜轴式太赫兹天线(DATE5望远镜缩比天线)开展了光学辅助指向测量的实验研究,在该天线背架上共轴安装了一台100 mm口径的折射式光学望远镜用于光学指向测量,并基于光学指向测量结果建立了一套包含23个误差项的指向修正模型.在利用上述方法修正太赫兹望远镜指向误差的过程中,需要保证光学望远镜光轴与太赫兹望远镜天线电轴之间的一致性.在两者之间存在差异时,需要对光电轴变化规律进行有效的标定和校正.本研究基于高精度数字摄影测量对光电轴一致性进行了实验测量和标定,并对实验结果进行了分析和讨论.DATE5望远镜及缩比天线如图1所示.

图1 DATE5概念结构(左);1.2 m DATE5缩比天线(右).Fig.1 Concept structure of DATE5(left);1.2 m DATE5 scaled antenna(right).
2 指向测量
2.1 光学辅助指向测量
本节以一台1.2 m口径太赫兹天线为应用对象,对光学辅助指向测量技术进行研究和实验验证.光学辅助指向测量的具体步骤如下:
(1)将CCD(Charge-Coupled Device)相机安装于小型光学望远镜的目镜位置,然后将安装了CCD相机的小型光学望远镜固定在1.2 m DATE5缩比样机的机架位置,并且使得光学望远镜的光轴指向和斜轴太赫兹望远镜的电轴指向同轴;
(2)启动主控程序,控制太赫兹天线斜轴和方位轴转动,使得小型光学望远镜能够指向天体,通过所拍摄天体的图像反馈信息(星点是否过饱和、星点是否模糊、星点数量是否过少、星点是否存在拖尾的现象等等)来不断调整CCD的设置参数以及光学望远镜的焦距,以便得到更清晰的星点图像;
(3)通过基于matlab的自动控制程序,控制太赫兹天线在一定区域内切换不同指向,并且控制TheSky X软件进行同步拍摄,即转动到一个斜轴和方位角并稳定若干秒后拍摄一张图像,如此不断扫描天区,通过f its图像处理得到光学点源的赤经赤纬位置信息,并最终转换为地平坐标.实测地平坐标与码盘地平坐标读数之间的差值即为该点上的指向误差.
光学望远镜在太赫兹天线上的安装位置如图2所示,光学指向测量的数据处理流程如图3所示,实验中采用的光学望远镜和CCD相机的参数分别如表1和表2所示,其中F表示光圈数,e-表示读出噪声单位电子.

图2 安装在太赫兹天线上的光学望远镜Fig.2 Optical telescope mounted on terahertz antenna

图3 数据处理流程图.J2000表示儒略纪元法下的2000历元、RA表示赤经、Dec表示赤纬、AZ表示方位角、SL表示斜轴角、EL表示俯仰角.Fig.3 Data processing f low chart.J2000 represents 2000 ep och in Julian era,RA represents right ascension,Dec represents declination,AZ represents azimuth angle,SL represents slant angle,and EL represents elevation angle.

表1 光学望远镜参数Table 1 Op tical telescop e p aram eters

表2 CCD相机参数Table 2 CCD cam era p aram eter s
2.2 重复测量误差
在应用光学辅助指向测量方法之前,我们首先进行了多次重复测量,以验证该方法的可重复性.
调整斜轴机架至完全静止,在相同方位角和斜轴角的情况下,每隔10 s拍摄一张f its图片,连续拍摄10次进行重复性验证.重复误差用均方根(rms)来计算,其公式如下:

其中xi为测量值,¯x为测量均值,n为测量的次数,实际测量过程中,我们选取了AZ分别为-190°、-180°、-170°、-160°和-155°,SL分别为90°、105°和120°共15组数据,进行重复性误差的实验测量,得到在方位角方向重复误差rms均值为1.7906′′,而在俯仰角方向重复误差rms均值为1.3635′′,单独测量的重复性是相当好的.图4展现了坐标分别为(-155°AZ,120°SL)、(-170°AZ,105°SL)和(-190°AZ,90°SL)3组数据在方位和俯仰方向上的重复误差分布图.

图4 重复误差:方位角方向(左);俯仰角方向(右).Fig.4 Repetition error:azimuth direction(left);elevation direction(right).
以下从大气视宁度、天线机架稳定性以及时间同步性这3个方面来分析重复测量误差的来源.
(1)大气视宁度
大气视宁度是影响光学指向测量精度的重要因素.大气湍流越剧烈,星光闪烁越厉害,用望远镜观测天体的时候波动就越大,这样小光学望远镜观测天体的位置与实际位置就有一定的偏差.观测的天体俯仰角越小,光线所穿过的云层越厚,受到大气湍流影响也越大.估计可造成1′′-2′′的误差;
(2)天线机架稳定性
在重复性测试中,每隔10 s拍摄一张f its图片,连续拍摄10次进行重复性验证,在这100 s的测试过程中,难免会受到风载和热力形变的影响,导致天线的随机抖动.风载对望远镜性能的影响主要体现在机架结构和光学元件的受力变形,且这种形变量在望远镜的不同俯仰角下有所不同.风载能够造成设备的指向精度和成像质量下降,其大小与风压、横截面积以及圆顶形状有关,并且具有一定随机性[10].
受望远镜内部元器件运行时产生的热能以及外部环境温度跳变的影响,望远镜机架结构和光学元器件由于工作环境中的温度变化会产生形变,特别是由受热不均匀导致的形变.温度变化导致轴系轻微倾斜、光学元件不共轴度增大,影响指向精度以及成像质量[10];
(3)时间同步性
在测试之前,首先将主控计算机的系统时间校准为北京时间,不过由于电脑主板中CMOS(Complementary Metal Oxide Semiconductor)电池的老化,随着时间的推移,系统时间逐渐和北京时间不能完全同步,这会影响北京时间换算到本地恒星时(Local Sidereal Time,LST)的准确性.
3 指向误差模型
导致望远镜的指向误差的原因有很多.这些原因包括望远镜制造加工不精准产生的误差、望远镜机架受到重力、大气折射或者温度变化产生的形变误差等.这些误差源大多数都存在着可重复的特点,能够通过理论分析建立误差表达式来修正这些误差[11].
3.1 包含7个误差项的基本指向模型
常用的地平式指向误差模型包含7个误差项[12],在俯仰θ和方位φ方向的指向误差分别可以表示为:


其中C1表示方位轴南北向偏差,C2表示方位轴东西向偏差,T1表示方位与俯仰轴不垂直,T2表示俯仰轴与天线电轴不垂直,C5表示方位码盘偏移,T3表示俯仰码盘偏移,C7表示重力弯沉.
斜轴式天线采用了非正交的斜轴-方位轴系,其斜轴-方位坐标(α,β)到俯仰-方位坐标(θ,φ)之间的转换关系为[13-14]:

根据上述坐标变换关系可推导出斜轴式望远镜7项指向误差模型,在俯仰和方位方向上的指向误差分别可以表示为:

其中C3表示方位与斜轴夹角与45°的偏差,C4表示斜轴与天线电轴夹角与45°的偏差,C6表示斜轴码盘偏移.
3.2 指向模型的扩展
为了更进一步提高指向误差的精度,通过分析7项指向模型的剩余误差,我们可以很容易地辨别出一些未校正的系统误差高阶项.例如,在俯仰角误差中发现了相对于方位角的两倍和3倍模式,可以认为它们分别与两个方位舱门和底座支撑引起的结构变形有关.此外,斜轴和方位轴均使用了钢带式码盘,通过分析可知码盘半径的不准确可能导致方位角和斜轴角误差随着码盘读数增加而线性增长[15].另外针对光学指向测量增加了一项大气折射项[16-17]和一项LST偏差项(由于实际LST校准不精确所导致的偏差值).
(1)大气折射
在指向模型中,俯仰方向必须对大气折射误差项ρ(由于光线穿越不同密度的大气产生的折射误差[18])进行修正.基于大气性质随高度变化的不同假设,形成了不同的大气折射修正模型,例如普尔科沃大气折射、《航海表》、中国天文年历和UNSW932模型等[17],其中一个常用的大气折射模型可以表示为:

其中c表示大气折射常数,与温度、气压、湿度有关.对于观测俯仰角大于60°的天体,用(8)式求得的大气折射误差约为0.1′′,但当俯仰角低于30°时,这个近似公式与实际情况相差很大,无法应用.对于低俯仰角情况,可采用更为复杂的大气折射模型[17].
(2)LST偏差
我们利用光学望远镜进行指向观测时,通过CCD相机对天空进行拍摄,在对图像预处理后,将图像和星表进行对照,结合匹配算法解算得到图像中心的赤道坐标,然后根据LST将赤道坐标转换为地平坐标.
时角-赤纬坐标(t,Dec)到俯仰-方位坐标(θ,φ)之间的转换关系为(γ为当地纬度)[11]:

为了精确获取指向坐标,首先需要校准LST,然而由于各种原因校准后仍有微小的偏差量ΔT,由(9)式可知,t也将产生偏差,再由(10)和(11)式可知,t产生的固定偏差将对指向模型中的俯仰差和方位差产生影响.将LST的固定偏差值转化为地平坐标系下的方位和俯仰角偏差的公式如下:

通过将上述这些高阶项加入到(6)-(7)式,其中ΔT由C23代替,我们得到了一个由23个误差项组成的扩展指向模型:

其中C8、C9、C16、C17表示方位舱门造成的结构变形,C10、C11、C18、C19表示底座支撑造成的结构变形,C12表示方位编码器的半径误差,C13、C14表示方位编码器的离心误差,C15表示斜轴编码器的半径误差,C20、C21表示斜轴编码器的离心误差,C22表示大气折射,C23表示LST的偏差.最后,我们得到了望远镜的总体指向误差公式为:

3.3 测量结果与模型拟合
我们所采用的观测数据是同一晚上重复测量4次作为4组独立的数据集,每一组数据包括了不同的方位、俯仰角共154个位置.测量点集在俯仰和方位上的分布如图5所示.
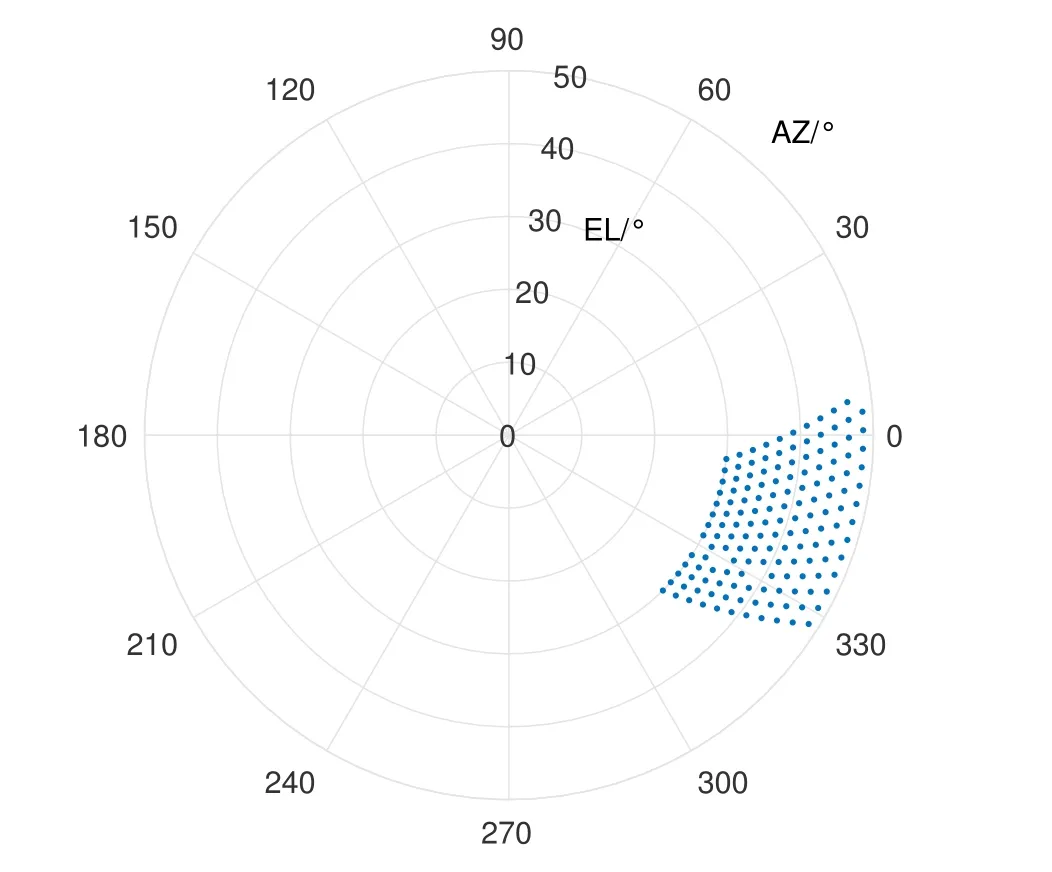
图5 指向测量样本分布Fig.5 Sample distribution of directional measurements
利用光学望远镜获取4组(每组154个测量点)指向测量数据后,对4组数据集分别进行23项指向误差模型拟合,得到的残差在俯仰和方位方向上的弥散图如图6所示.模型拟合前后的指向误差rms值分别汇总于表3和表4中,其中rms-AZ表示方位角方向上的均方根值,rms-EL表示俯仰角方向上的均方根值,rms-tot表示总的均方根值.

表4 模型拟合后的残差rmsTable 4 Resid ual rm s after m od el f itting

图6 23项式拟合后残差分布图:图(a)-(d)表示同一天的4组数据,d AZ表示方位角方向与10次测量均值的偏差值,d EL表示俯仰角方向与10次测量均值的偏差值.Fig.6 Residual distribution by using 23 term f itting:panels(a)-(d)are the four groups of data on the same day,d AZ represents the deviation between the azimuth direction and the mean value of ten measurements,d EL represents the deviation between the elevation direction and the mean value of ten measurements.

表3 模型拟合前的残差rmsTable 3 Residual rms befor e mod el f itting
为了进一步验证模型的稳定性,将每一组数据中随机抽取一半的数据作为模型的训练集用于参数拟合,另一半作为模型的检测集用于计算拟合残差,得到残差在俯仰和方位方向上的弥散图如图7所示.将每一组训练和检测集拟合后的残差rms值分别汇总于表5中.

图7 残差分布图:图(a)-(d)表示同一天的4组检测集在俯仰和方位方向上的拟合残差分布Fig.7 Residual distribution:panels(a)-(d)show the f itting residual distribution of four groups of detection sets in elevation directions and azimuth directions on the same day
比较表4和表5可知,利用训练数据集建立的指向模型仍然能够较好地拟合检测集数据,rms残差均在4′′以下,说明指向模型的稳定性较好.

表5 拟合残差的rms:采用一半数据作为训练集、另一半作为检测集Table 5 The rms of f itting resid uals:using half of the d ata as the tr aining set and the other half as the d etection set
4 与数字摄影测量结果的比较
通过上述实验,已经建立了安装在太赫兹望远镜上的小型光学望远镜的指向模型,接下来如何保证小型光学望远镜的光轴与太赫兹望远镜电轴指向的一致性,使得小型光学望远镜指向真实反映太赫兹天线指向仍是需要重点研究的问题.光电轴之间的固定系统误差可以通过对同一点源目标的观测进行校准,因此只需考虑由重力变形和温度变形引起的光电轴动态变化特性.
天线电轴由主反射面、副反射面和馈源共同确定.考虑到主反射面相对于副面和馈源更容易产生变形,我们首先标定光轴相对于主反射面随俯仰的变化.我们利用高精度的数字摄影测量技术来标定主反射面的指向.通过摄影测量,获取天线主面上的三维坐标采样,从而拟合出旋转抛物面的对称轴作为天线的电轴,并将之与光学观测得到的光轴指向进行比较.
实际测量过程中,我们将天线的方位角固定为-15°,而俯仰角依次从30°增大到50°,并分别对光轴和电轴的指向进行了测量.通过理论分析,由于光电轴之间的初始装配误差,即光学望远镜安装到天线背架上时,其光轴与天线并非完全同轴,而是存在一定的夹角.随着天线斜轴的运动,主反射面产生自旋运动,并导致光电轴夹角在俯仰方向的分量产生变化.
主反射面自旋角p随斜轴坐标α的变化关系为:

根据斜轴天线的轴系几何关系,可以推导出光电轴夹角在俯仰方向上的分量为:

其中λ为电轴和光轴指向的夹角,φ为初始位置(俯仰角30°)光轴指向与x轴的夹角.利用(18)式对观测数据进行拟合,得到图8中的拟合曲线.通过拟合得到了电轴和光轴指向的夹角λ为0.5086°,拟合前光电轴之间角度的rms值为269.3857′′,拟合后的残差rms值为7.359′′.考虑到数字摄影测量和光学辅助测量的指向测量精度均在3′′左右,上述拟合结果符合预期,证明光电轴一致性误差主要由主反射面自旋引起的系统性误差主导.

图8 光电轴之间的夹角随天线俯仰的变化曲线Fig.8 The change curve of the angle between the optical axis and the electrical axis with the increase of the antenna elevation angle
在后续的工作中,我们还将考虑采用更完善的光电轴标定方法,例如直接利用馈源处的接收机对光电轴进行标定,从而反映馈源和副面偏移的影响.
5 结论与展望
依托紫金山天文台1.2 m斜轴式太赫兹天线开展了光学辅助指向测量的实验研究,利用一台安装在天线背架上的100 mm口径折射式光学望远镜开展光学指向测量,获得了优于2′′的重复测量精度,并基于光学指向测量结果建立了天线指向修正模型.通过对斜轴天线的结构分析以及大气折射和本地恒星时偏差等误差来源的分析,建立了一套包含23个误差项的斜轴式望远镜的指向修正模型.多组指向测量的实验数据表明,该扩展指向模型能有效地校正残余指向误差,实现约3′′的拟合精度,并且具有较高的稳定性.最后,本文还借助高精度数字摄影测量技术对光电轴一致性及其变化规律开展了实验测量和标定.通过本研究,验证了利用光学手段辅助太赫兹天线指向测量和指向误差修正的可行性,为太赫兹望远镜高精度指向的实现提供了一种可供参考的解决途径.
