引入新数据源的D-S 融合检测方法
2021-12-02林水生卫伯言杨海芬朱磊基
林水生,卫伯言,杨海芬*,熊 勇,朱磊基,于 良
(1. 电子科技大学信息与通信工程学院 成都 611731;2. 中国科学院上海微系统与信息技术研究所 上海 长宁区 201899)
随着社会发展,城市人口愈发密集,火灾发生数量逐年增加。火灾造成财产损失和人员伤亡,给社会带来不可估量的伤害,因此如何及时准确地探测火灾至关重要。
传统检测火灾的传感器,使用了烟雾探测器。烟雾探测器根据探测原理可分为两类:基于电离的探测器和基于光电的探测器。基于光电的烟雾探测器利用烟雾粒子影响光的散射来探测烟雾;基于电离的烟雾探测器则利用烟雾颗粒的存在会导致电极之间的电流下降来检测烟雾。但是单一信号判别火灾易受到环境影响,产生虚警,准确率不高。为了提升火灾探测准确率,需要使用多传感器探测火灾,因此选取合适的探测数据源、合理融合多传感器信息成为了探测火灾的关键。
目前用于判别火灾的数据源多来自CO 浓度、CO2浓度、烟雾浓度、温湿度和光照强度。而融合多传感器信息方法则多种多样。如文献[1-2]使用模糊逻辑融合温度、火焰强度、烟雾浓度信息;文献[3]使用模糊逻辑融合烟雾、温度、湿度、CO浓度信息;文献[4]先使用卡尔曼滤波对温度、湿度和烟雾信息进行预处理,再通过模糊逻辑判别室外火灾。模糊逻辑虽然可以模拟人的思考判断方式,但是模糊规则多由人为经验确定,不具有客观性。文献[5-6]使用反向传播(back propagation, BP)神经网络训练CO、温度和烟雾来提升火灾探测准确率;文献[7]使用卷积神经网络(convolutional neural networks, CNN)训练数据检测火灾,但是神经网络需要大量的训练数据,而火灾数据不易采集。文献[8-14]提出了基于图像、视频处理等方法检测火灾的方法,但是计算资源消耗过大,所用时间较长。文献[15]使用D-S 证据理论融合温度、烟雾和光照强度信息,并且规定冲突因子K小于阈值来判别火灾;文献[16]则单纯使用D-S 证据理论融合温度和烟雾浓度,但是D-S 证据理论没有充分考虑证据之间的相互关系,容易造成信任悖论,产生不可能发生的情况或者与事实相反的情况。目前对于D-S 证据理论的改进,可分为3 类:1) 为数据源分配权重,对其改进[17-19];2) 对合成规则的改进[20-21];3) 既修改证据源,也改进合成规则[22]。
本文使用温度、烟雾浓度、CO 浓度、O2浓度、热释放速率作为数据源,使用火灾判别概率函数计算每个数据源对应的火灾判别概率向量P,结合Jousselme 距离为各个数据源分配权重,最后通过D-S 证据理论对多传感器判别信息融合,得到最终的火灾判别概率。本方法充分考虑了各个信号之间的关系,仿真结果表明,在保证准确率的基础上,可提前检测出火灾,有效提升火灾探测及时性。
1 数据源选择及其对火灾判别
火灾检测信号的选择对火灾检测至关重要。本文通过数据分析与多次仿真验证对比确定火灾探测信号,并且使用模糊逻辑隶属度函数构建各个信号的火灾判别概率函数。
1.1 数据源选择
由于火灾数据不易采集,本文采用软件PyroSim仿真火灾,模拟开放房间中沙发燃烧并且引燃整个房间的情景,选择燃烧反应为WOOD_OAK,环境、燃烧速率等因素均设置为默认。其中,气体浓度(PPM)单位为mol/mol,热释放速率(HRR)单位为kW/h,燃烧时间设定为600 s,包含从没有火灾到火灾开始并最终结束的整个过程。各数据源的量化信号随时间变化曲线如图1 所示。
目前已有文献中,用于判别火灾的数据源多来自CO 浓度、CO2浓度、烟雾浓度、温湿度、光照强度。而由图1 可以看出,在火灾发生过程中,因为燃烧反应产物等原因,会产生一定水分,所以水分并未大量减少。而CO2在实际环境中受到的影响因素较多,会对火灾判别产生干扰;此外,火灾发生过程中,光照强度的变化来自于烟雾浓度的变化。因而本文不选用常用的湿度、CO2浓度和光照强度作为数据源。
从图1 可以看出,CO 浓度、烟雾浓度、温度、O2浓度和热释放速率会随着火灾的发展趋势而变化。图2 给出了加入O2浓度和热释放速率相对于常规CO 浓度、烟雾浓度、温度等判别火灾的概率增益,可以看出加入O2浓度和热释放速率后对判断火灾发生和熄灭阶段提升效果更为明显。因此本文采取CO 浓度、烟雾浓度、温度、O2浓度差值和热释放速率作为火灾检测数据源。

图2 不同数据源仿真结果对比
1.2 数据源的火灾判别概率函数
本文CO 浓度、烟雾浓度、温度、O2浓度差值和热释放速率的火灾判别概率函数的构建,采用模糊逻辑隶属度函数方法[23],具体使用三角形与梯形结合的形式,将火灾状态分为:“无火”“阴燃火”“明火”3 种。经过试验获取,函数构造如图3所示。将各数据源通过其对应的火灾判别概率函数得到各自的火灾判别概率向量P。
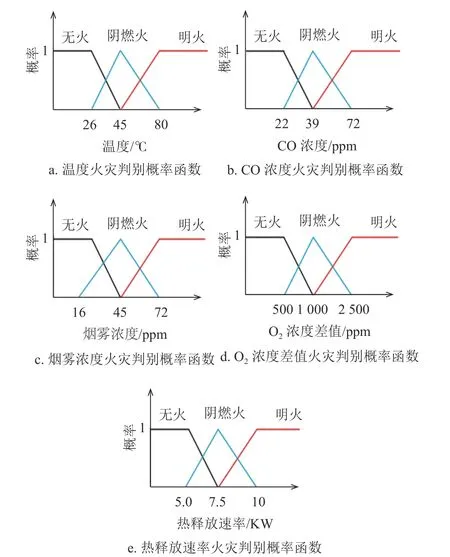
图3 火灾判别概率函数
2 D-S 证据理论融合多传感器判别方法
2.1 D-S 证据理论算法基本构建

2.2 D-S 证据理论算法改进
针对经典D-S 证据理论没有考虑证据之间的差异,引起信任悖论的现象,本文使用Jousselme 距离[24]评估证据源之间差异,进而为各个证据源分配权重。
首先,构建距离矩阵DM 如下:
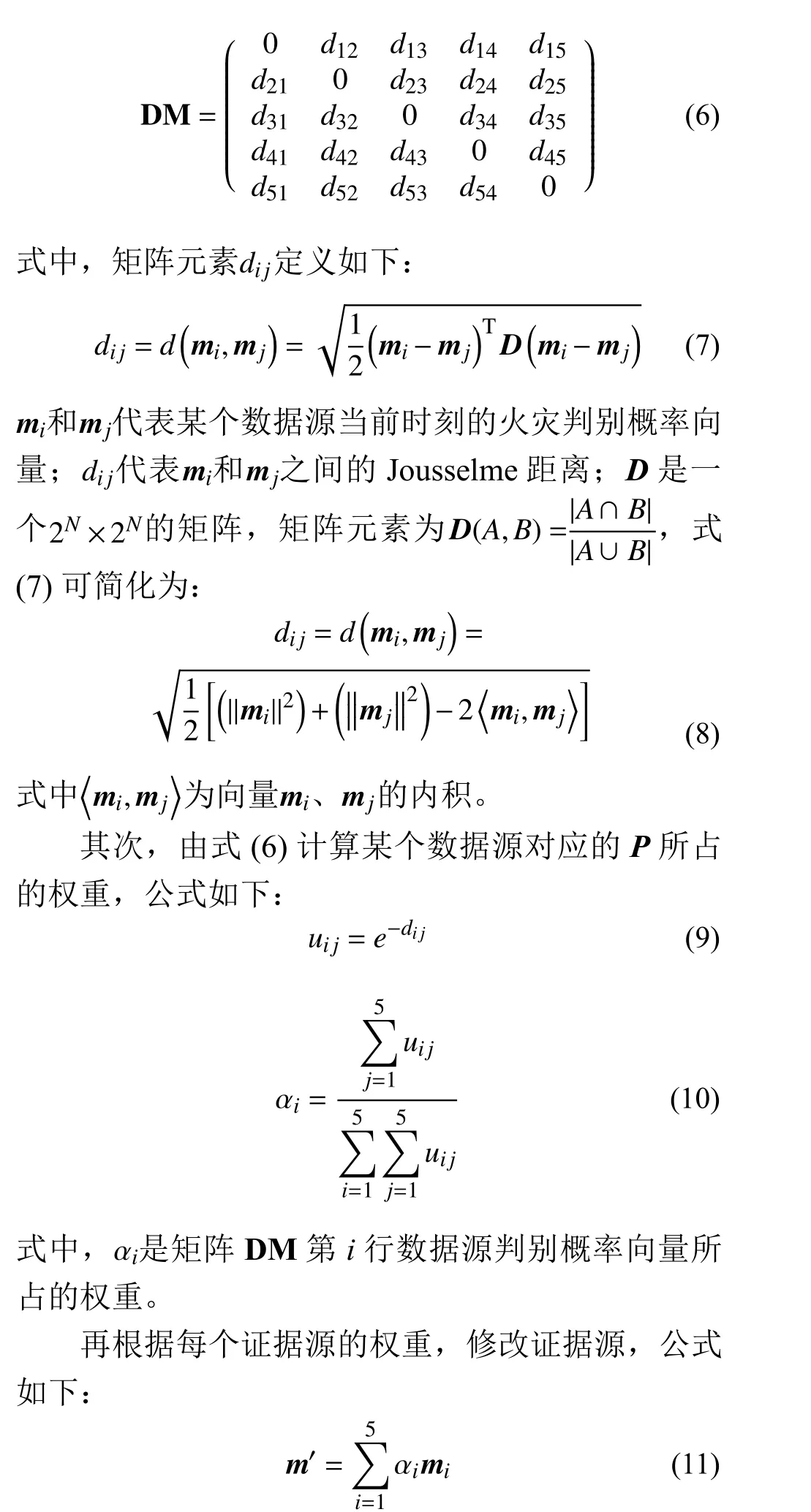
式中,mi是 每个数据源对应的判别概率向量;m′是各个证据源融合后的判别概率向量。
最后,对m′进行n-1 次D-S 证据理论融合,得到最终的判别概率P(Ii)。式(4)可简化为:

具体算法如图4 所示,过程如下:1)获取5 种火灾信号:CO 浓度、烟雾浓度、温度、O2浓度差值和热释放速率,作为数据源;2) 将数据源通过图3 火灾判决概率函数,分别得到各个数据源的火灾判别概率;3) 构建距离矩阵,通过式(6)~式(11)计算各个数据源权重并且修改证据源;4) 融合后的证据源进行4 次证据理论融合,得到最终火灾发生概率;5) 将阴燃火和明火概率相加作为火灾发生概率,若大于0.8,则判定为火灾发生。
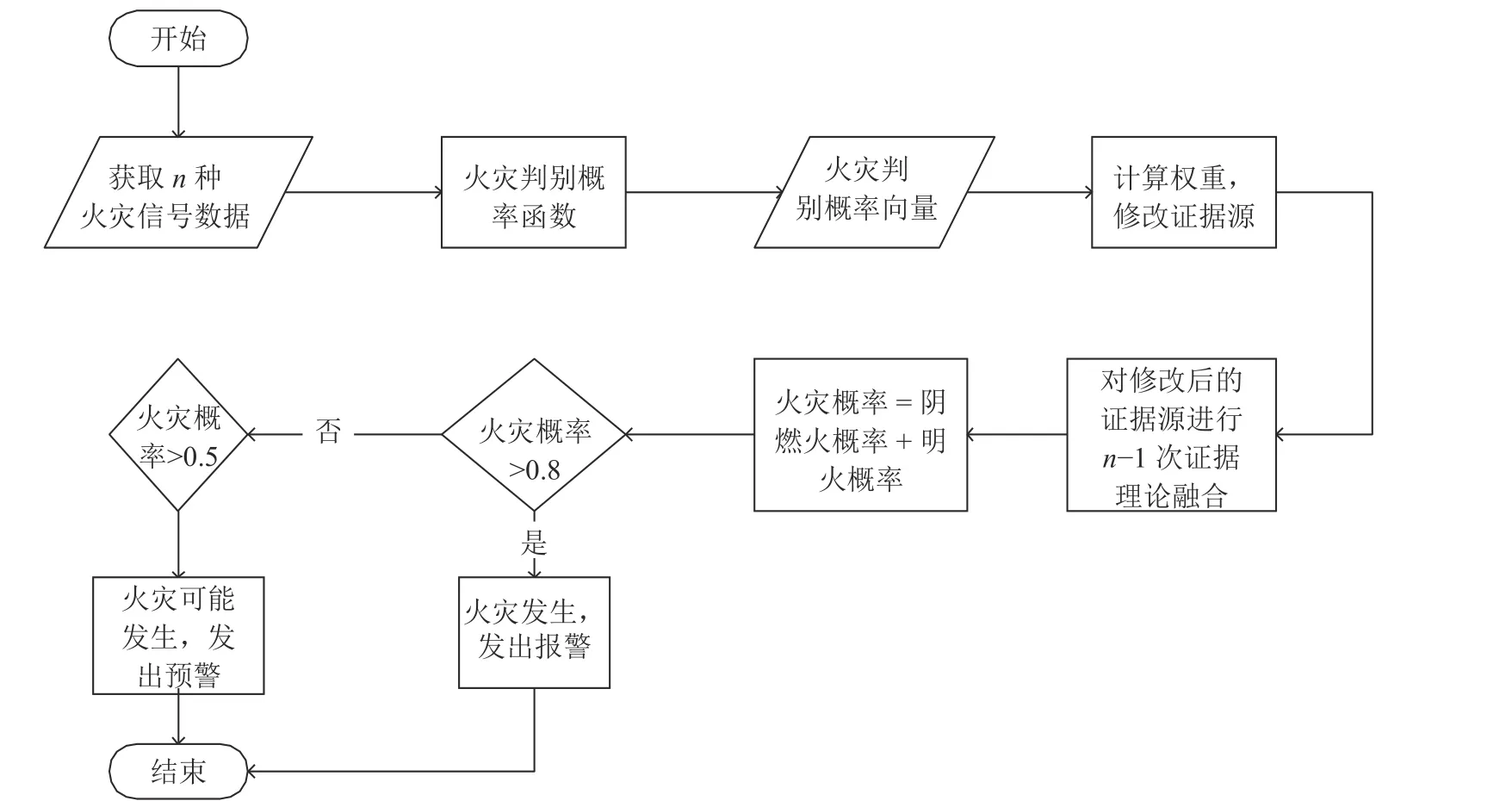
图4 算法框图
3 仿真及结果分析
3.1 仿真条件及结果
本文使用软件PyroSim 仿真火灾发生情况得到火灾数据,后经Matlab 处理数据得到火灾判别概率。仿真两个燃烧场景来进行判别结果对比,采样频率为2 Hz。第一个场景模拟明火过程。开放房间内,上方沙发起火,然后燃烧整个房间至火灾结束,其中火灾发生时,火焰从沙发升起时间较短,并且发出明显亮光,反应了火灾发生时的明火现象。第二个场景模拟阴燃火过程。燃烧点先发出大量黑烟,之后产生火光。其余燃烧设置均为软件默认。仿真中,假定将首次发出明显亮光时刻作为火灾起始时间,而将火焰熄灭时刻作为火灾结束时间;算法中则将最终判别概率>0.8 时,判断为火灾发生。
经过仿真发现,仅使用D-S 证据理论算法[13]或加上归一化因子K[12]融合CO 浓度、烟雾浓度、温度判别,在某些时刻会产生0/0,即NaN 现象,无法检测出火灾,如图5 所示。而通过计算Jousselme距离分配数据源权重可以解决此问题, 因此本文不再进行D-S 证据理论和本文算法的对比。仅比较使用本文算法与选取烟雾浓度、温度、CO 浓度的方法,具体从阴燃火、明火两种场景进行比较。仿真对比如下。
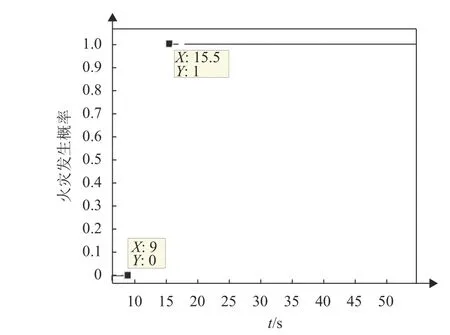
图5 仅使用D-S 证据理论
场景①:明火场景场景
如图6,该场景于3.7 s 出可以看到明显亮光。算法仿真结果如图7 所示,可以看出,本文方法在X=18,即t=9 s 处检测出火灾;早于对比方法在X=28,即t=14 s 处检测出火灾。
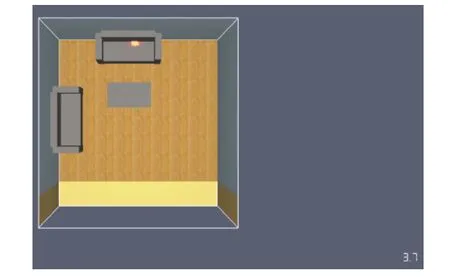
图6 明火场景
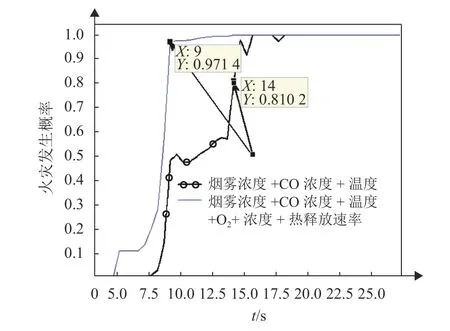
图7 明火场景火灾发生概率对比
场景②:阴燃火灾场景
如图8,该场景先大量散发烟雾,于17 s 处可看到火光。仿真结果如图9 所示,可以看出,本文方法最早在X=34,即t=17 s 处检测出火灾;早于对比方法在X=41,即t=20.5 s 处检测出火灾。
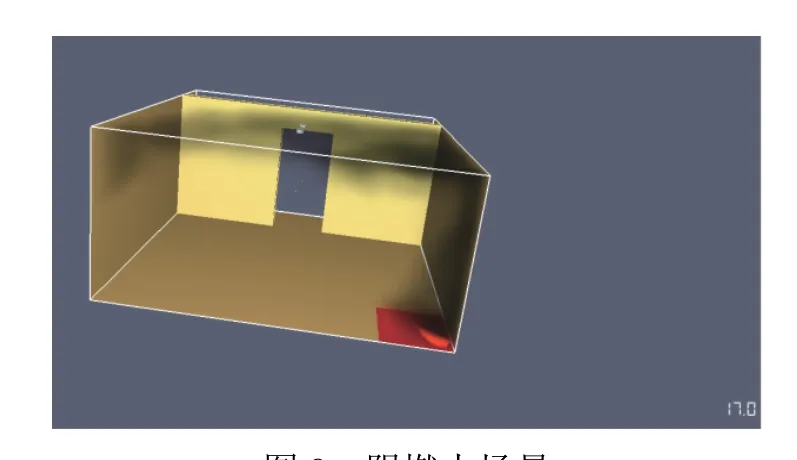
图8 阴燃火场景
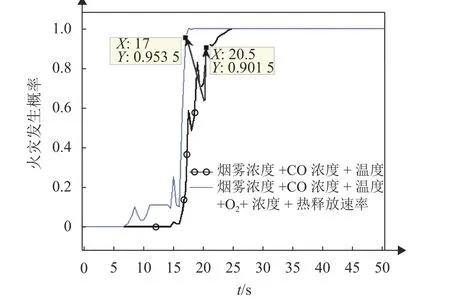
图9 阴燃火场景火灾发生概率对比
总之,在使用同样Jousselme 距离改进D-S 证据理论方法情况下,本文方法相比于目前传统方法,明火场景可提前5 s 检测出来;阴燃火情况提前3.5 s 检测出来。此外,本文方法还解决了文献[12-13]在融合过程中产生的NaN 现象。
3.2 未能更早判别火灾原因分析
本节分析了在火灾发生初期,未能检测出火灾的原因。
情景①:由图6 可以看出,该场景于3.7 s时,有明显亮光;而由图7 可以看出,本文方法在X=18,t=9 s,即延时5.3 s 才可检测出火灾。选取火灾检测信号CO 浓度、温度、烟雾浓度、O2浓度以及热释放速率在0~30 s 的变化曲线,如图10 所示。由图可以看出:本场景的CO 浓度、烟雾浓度、温度、O2浓度在X=12,t=6 s 之前,与初始浓度相比无变化,在t=6 s 之后开始逐渐增长;热释放速率于X=8,t=4 s 之后开始增长。
分析其原因,火灾信号的变化需要一定时间,在火灾发生初期,信号变化缓慢,数值较小,经过对应火灾判别概率函数,得到阴燃火概率与明火概率较小,因此不能检测火灾发生。经过一定时间积累,检测信号发生明显变化,才可检测出火灾。故而需要一定延时方可检测出火灾。
情景②:同样的选取火灾检测信号0~30 s 的变化曲线,如图11 所示。由图8 可知,该场景在17 s时,有明显亮光;而图8 显示本文方法在X=34,t=17 s,检测出火灾,即该场景在火光发生时可以准确检测。分析其原因,由图10 可以看出:本场景的CO 浓度、烟雾浓度、温度、O2浓度、热释放速率在X=34,t=17 s 时,检测信号已有明显变化,数值较大,通过对应火灾判别概率函数,得到阴燃火概率与明火概率较大,因此可以检测火灾发生。
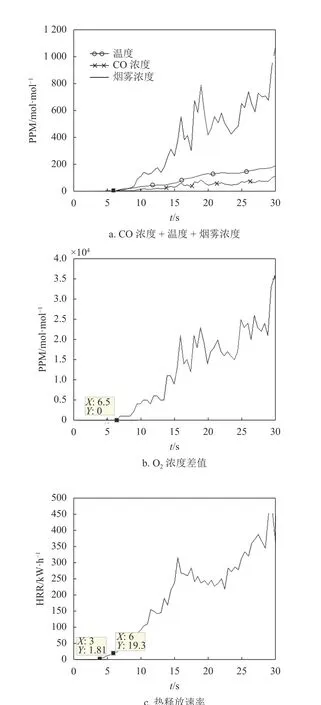
图10 场景①:信号随时间变化
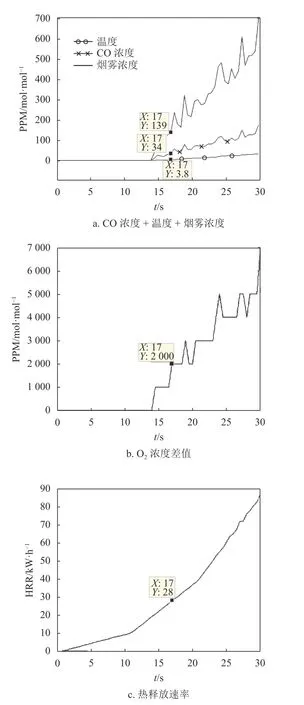
图11 场景②:信号随时间变化
4 结 束 语
本文针对目前火灾检测性能的不足,引入新的火灾探测数据源,研究了将模糊逻辑和D-S 证据理论融合应用于火灾探测的方法,避免了单纯使用信号阈值判别火灾易造成误判的缺陷。同时综合考虑温度、烟雾浓度、CO 浓度、O2浓度与环境初始浓度差值、以及热释放速率等信息,弥补了单一传感器判别易受外界影响、造成虚警的不足。仿真结果表明,本文方法提前了火灾探测时间,提升了火灾探测及时性。
