基于适应度继承的航空发电机比例-积分-微分参数优化算法
2021-12-02客汉宸
李 昆,赵 理,汪 光,客汉宸
(北京信息科技大学机电工程学院,北京 100192)
构建航空发电机系统实时仿真模型,是航空电源系统设计、工作特性分析、故障预测等多项重要工作的基础[1]。当前,三级无刷交流发电机广泛应用于航空电源系统中。该系统结构复杂、建模困难,针对该系统的建模仿真及比例-积分-微分(proportion-integration-differentiation,PID)参数优化问题已成为中外学者们研究的重点[2]。
文献[3]分析了无刷交流发电机调压系统幅频特性后,采用带有低通滤波器的PID控制策略,加快了系统响应速度,但其稳定精度有待提高。文献[4]引入模糊PID调节器来代替传统的PID控制,提高了变频交流发电系统动态调压性能,但其精度受量化等级和专家经验制约。文献[5]提出了采用小脑模型神经网络(cerebellar model articulation controller,CMAC)和常规PID算法并行控制的励磁方案,该方案优于常规PID控制策略,但由于采用两级式无刷交流发电机和直流电源结合的简化模型,其仿真效果与完整的三级无刷交流发电机模型存在一定差异。文献[6]利用遗传算法对同步发电机励磁系统进行优化设计,在系统动态性能和稳态性能方面取得一定进展,但由于非线性、时变不确定性等原因其工程化应用能力略显不足。文献[7]提出了一种具有动态惯性权重的非线性递减的改进粒子群算法,该算法运用于水轮发电机组PID参数优化时,收敛速度和搜索效率较好,但后期可能陷入局部最优解。文献[8]分别采用经典PID励磁控制和线性最优励磁控制对发电系统进行仿真分析,在短路干扰和突加负载干扰下,线性最优励磁控制的系统振幅和调节时间更低,但其存在测量指标多和结构复杂的问题。
当前,在发电机系统建模及PID参数优化领域,很多学者将控制对象用简单数学传递函数进行表示[9]。然而,在航空电源领域,三级无刷交流发电机系统的运行工作过程中很复杂,很难用明确的数学公式进行表达,其PID参数的优化过程更是需要用模型的运行结果(而不是简单数学公式计算)来确定,这就导致传统的优化算法因仿真过程时间过长而不可行。
针对此问题,现提出一种基于适应度继承的遗传算法(fitness inheritance genetic algorithm,FIGA),该算法将Kp、Ki、Kd3个PID参数组合作为种群个体,将上升时间及调节时间组合定义为优化目标,在寻优过程中对精英个体利用模型的仿真结果来确定其适应度,对其他个体利用日志分析器来进行适应度估计,实现估计值与精确值的结合,在保证寻优质量的同时缩短算法的运行时间。
1 基于适应度继承的航空发电机系统仿真模型
1.1 无刷交流发电机的结构
如图1所示,位于同一转轴上的永磁副励磁机、交流主励磁机、主发电机及旋转整流器等部件构成了三级无刷交流发电机[10]。该发电机在主轴转速、负载发生动态变化时,通过发电机控制单元(generator control unit,GCU)等控制部件来保持输出电压及频率的稳定,对机载设备提供高质量电能。

图1 三级式无刷交流发电机结构示意图Fig.1 Schematic diagram of three-stage brushless alternator
1.2 FIGA-PID励磁调压控制器原理
GCU中的励磁调压控制器利用脉宽调制技术工作,主要由检测模块、比较模块、功率放大模块和执行模块等组成。其中,电压检测模块可实时监测电源系统输出电压Uabc的变化情况。当发电机外接负载和转速出现波动时,比较模块负责产生偏差信号,该信号由FIGA和PID算法进行在线优化和控制调节,经功率放大后,执行模块通过改变占空比来控制交流主励磁机输出励磁电流的大小,从而保证负载电压的稳定[11],FIGA-PID控制原理图如图2所示。

图2 FIGA-PID励磁控制器示意图Fig.2 Schematic diagram of FIGA-PID excitation controller
1.3 基于遗传算法的PID整定
通常,PID控制器参数整定可以通过手动反复尝试并借鉴工程技术人员的技术经验来完成,也可以通过传统遗传算法进行寻优[12]。遗传算法(genetic algorithm,GA)是一种以达尔文的进化论为基础的优化算法,该算法通过模拟自然界中生物种群演变的进化过程和机制进行寻优,将其与三级无刷交流发电机控制系统相结合,可提高PID控制参数的寻优效率,其控制系统框图如图3所示。
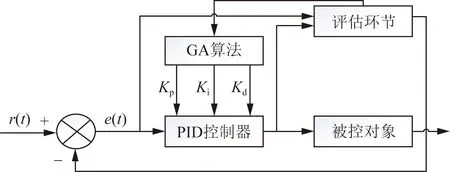
图3 基于遗传算法的PID控制系统原理框图Fig.3 Principle block diagram of PID control system based on genetic algorithm
1.4 基于适应度继承的遗传算法的描述
遗传算法中常用适应度来度量进化过程中个体的优良程度,其值越高则个体遗传到下一代的概率就越大。本文提出的基于适应度继承的遗传(FIGA)算法在传统遗传算法的基础上进行改进,在处理需要大量时间进行适应度计算的优化问题时实现了估计值与精确值的结合,缩短了运行时间。
三级式无刷交流发电机PID参数优化过程中,FIGA算法将(Kp、Ki、Kd)当作个体,基于适应度继承进行非精英个体适应度计算。
1.4.1 聚类
将初始种群中个体聚类为P个子类,采用分割型聚类方法,对个体进行相似性度量。建立一个类集合,使集合中每个类内的样本保持最大的相似性,基于样本间的距离进行相似性评价,公式为
(1)
式(1)中:dij为两个个体xi和xj之间的相似度;P为聚类的子类个数;m=1时为曼哈顿距离,m=2时为欧几里得距离,m=3时为闵可夫斯基距离。
1.4.2 适应度计算与估计
将子类P(i)中个体分为精英个体和非精英个体,对精英个体利用三级式无刷交流发电机仿真模型运行结果评价个体适应度,对非精英个体利用日志分析器进行适应度估计。日志分析器采用K均值算法计算同组中其他个体的适应度,公式为
(2)
式(2)中:n为被优化参数个数;ci为精英个体第i个参量值;xi为非精英个体的第i个参量值;λ为比例系数。当个体的不同参量的量纲相差较大时,可进行归一化。
FIGA算法流程如图4所示,其与GA算法的主要区别为适应度计算部分即图中灰色模块。

图4 基于FIGA算法的PID参数优化示意图Fig.4 Schematic diagram of PID parameter optimization based on FIGA algorithm
2 仿真实验分析
基于MATLAB/Simulink 搭建某型三级式无刷交流发电机仿真模型,如图5所示。系统仿真参数如下:额定功率范围90~180 kVA;转速范围7 200~13 000 r/min;频率400 Hz;额定电流260 A;输出形式三相三线制;功率因数0.75~1。
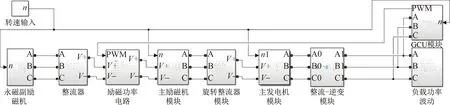
图5 三级无刷交流发电机系统仿真总图Fig.5 General diagram of three-stage brushless alternator system simulation
2.1 PID仿真模块设计
如图6所示,输入转速信号n经过增益环节转化成角速度ω,负载电压Va、Vb、Vc经dq0变换后转化为两相同步旋转坐标系下电压,经电磁转矩环节和低通滤波环节处理后,与输入的参考电压Vref进行比较,获得的偏差值用于PID控制,控制信号经一阶低通滤波和延时环节得到PWM输出信号,通过占空比来调节交流励磁机励磁电流,进而使主发电机获得稳定的电压。

图6 三级无刷交流发电机PID控制模块Fig.6 Three-stage brushless alternator PID control module
2.2 系统启动过程分析
系统启动时,永磁副励磁机产生三相交流电,经全波整流后向励磁功率电路提供电能。励磁功率模块在PWM信号调控下向主励磁机提供变电压直流电,进而间接调节负载电压,使之维持稳定。整流逆变模块,则用来维持负载频率稳定。
如图7所示,PID参数优化后,系统启动过程较平稳,励磁电压及励磁电流同步、逐渐增加,在0.26 s左右分别达到其稳定值13 V、22 A。如图8所示,主发电机输入电压与主发电机转子电流尽管也逐步增加,但达到峰值的时间却不同步,分别为45 V/0.17 s、68 A/0.26 s。这主要是由于主发电机转-定子磁场的存在使得转子电流对输入电压产生了一定的滞后效应。

图7 主励磁机励磁电压和电流Fig.7 Excitation voltage and current of main exciter
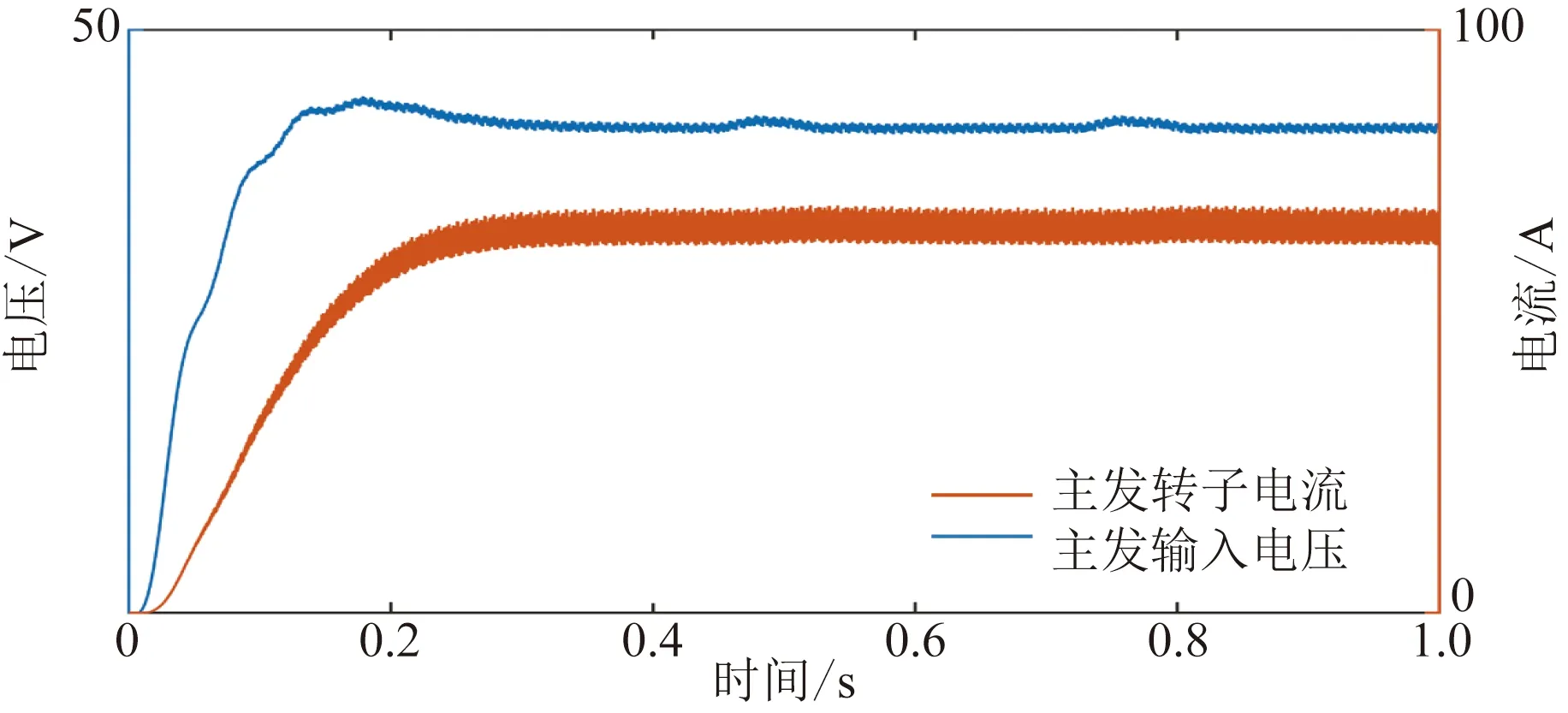
图8 主发电机输入电压和主发转子电流Fig.8 Main generator input voltage and rotor current
主发电机的输出三相交流电经过整流-逆变后,给负载提供频率、电压稳定的三相交流电。由图9可见,系统启动过程(0~0.26 s)结束后,电压稳定在约155 V、频率稳定在400 Hz、波形周期为 0.002 5 s。

图9 负载电压图Fig.9 Load voltage diagram
2.3 负载功率波动过程分析
负载功率波动是三级无刷交流发电机工作过程中常见现象[13]。根据设计要求,负载正常波动范围为90~180 kW。通过设置仿真参数:负载功率脉冲周期为1,将仿真过程设置为:在开机0.5 s、转速为 10 000 r/min时,将负载功率分别从100、140、180 kW瞬间变化到90 kW,来分析仿真系统在外接负载功率波动条件下,保持输出电压、频率稳定的能力。
如图10所示,当外接负载功率需求分别从100、140、180 kW 瞬间变化到90 kW时,主发电机输出电能过剩,励磁功率模块在GCU模块输出PWM信号的调控下,降低了主励磁机励磁电流,经旋转整流器模块整流后传递至主发电机,从而实现输出负载功率的下降。在0.5 s时主励磁机励磁电流分别从稳定时的21、17和14 A快速降低至13 A并保持稳定。同时,主发输入电压分别从稳定时的42、37和30 V降低至28 V,如图11所示。

图10 主励磁机励磁电流Fig.10 Excitation current of main exciter

图11 主发电机输入电压Fig.11 Input voltage of main generator
如图12所示,当外接负载功率分别从100、140、180 kW降低到90 kW时,外接负载电压有一个明显的上升跃变。由于调压系统存在,外接负载电压经过约0.2 s恢复到稳定值155 V左右。电压跃变的幅度由功率变化的大小决定,功率变化越大,电压跃变的幅度也越大。例如,外接负载功率由180 kW降低到90 kW时,负载电压跃变了230-155 =75 V;由100 kW降低到90 kW时,负载电压跃变了170-155=15 V。事实上,该跃变过程受发电机内部电枢反应、绕组电抗等因素影响,具体过程较为复杂。

图12 负载功率波动对比Fig.12 Load power fluctuation comparison
总之,该三级无刷交流发电机GCU模块PID参数调节仿真系统,在允许的负载功率波动范围内,能满足航空发电机系统电压调节的需求。
2.4 转速波动过程分析
如图13所示,分析了三级无刷交流发电机系统在负载功率为180 kW条件下,转速波动的响应过程。在系统启动0.5 s后,将转速在0.1 s内,分别从8 000 r/min上升到9 000、11 000和13 000 r/min,从而观察主励磁机励磁电流、主发输入电压、负载电压等参数的变化过程。
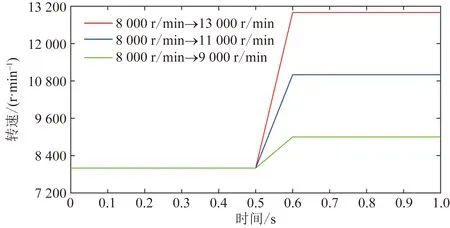
图13 转速波动曲线Fig.13 Speed fluctuation curve
如图14所示,0~0.3 s为系统启动过程,0.3~0.5 s系统处于恒频稳压状态。从0.5 s开始,系统在发动机附件机匣带动下转速由8 000 r/min快速上升到9 000、11 000和13 000 r/min,输出能量增加、用电设备功率不变,GCU模块输出PWM信号快速减小,从而使励磁电流由原来的28 A分别降低到25、17和15 A。同时主发输入电压在0.5~0.6 s内,由45 V分别快速上升至52、57和61 V,之后逐渐降低分别稳定到43、38和36 V,如图15所示。

图14 转速波动情况下励磁电流曲线Fig.14 Excitation current curve under the condition of speed fluctuation
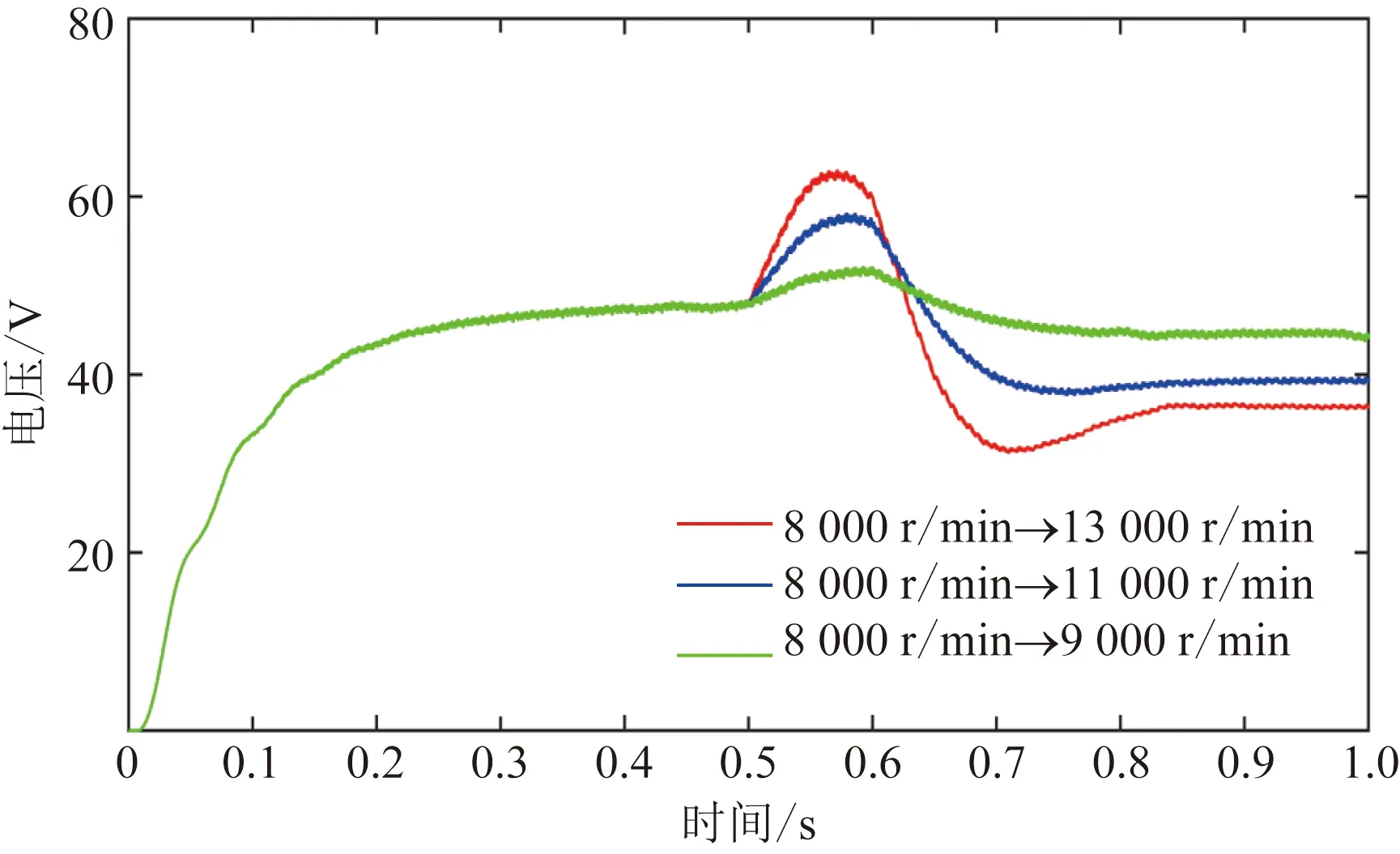
图15 转速波动情况下主发输入电压曲线Fig.15 Main generator input voltage curve under the condition of speed fluctuation
如图16所示,输出到负载的电压波动幅度及其稳定时间随转速波动的剧烈而变大/变长。当转速由8 000 r/min分别变化到9 000、11 000和13 000 r/min时,负载电压由稳定时的155 V分别上升到181、223和260 V,之后逐步回落。另外,对应的电压波动时间范围分别为0.5~0.73、0.5~0.74、0.5~0.76 s。

图16 转速波动条件下负载电压变化Fig.16 Load voltage change under the condition of speed fluctuation
由此可见,该三级无刷交流发电机GCU模块PID参数调节系统,在允许的转速波动范围内能有效仿真输出负载的功率变化,并满足无刷交流发电机励磁控制系统的要求。
2.5 FIGA与GA算法对比分析
在FIGA与GA算法中,统一设置种群规模为100,遗传代数为80,交叉率为0.92,变异率为0.1,对不同参数的变化范围进行归一化。在FIGA中,设置聚类数为12,对精英个体利用三级式无刷交流发电机仿真模型运行结果计算适应度,对非精英个体利用日志分析器进行适应度估计,结果如图17、图18、表1所示。

图17 FIGA算法中PID参数进化代数对比Fig.17 Comparison of PID parameter evolution algebra in FIGA algorithm
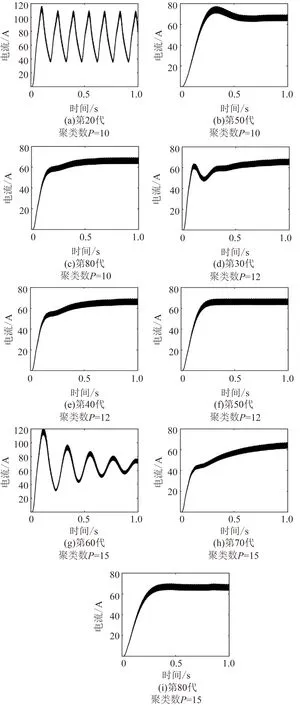
图18 FIGA算法中聚类规模对比Fig.18 Comparison of clustering scale in FIGA algorithm
为了清楚地观察不同PID参数对运行结果的影响,在励磁电压、励磁电流、主发电压、主发转子电流、负载电压等几个参数中,选择直观、便于比较的主发转子电流作为观察对象。由图17可见,FIGA算法第1、10、20代中最优个体均无法使系统维持稳定,第30、40、50、60代中最优个体可使系统经过一定的振荡次数后趋于稳定,从第70代开始系统进入稳定状态时间逐渐缩短,第80代达到0.26 s。
为进一步观察聚类个数对FIGA算法的影响,将聚类参数P分别设置为10、12、15,对FIGA算法的第20、50、80代运行结果进行考核。如图18所示,发现聚类个数并非越大越好,当进化到第80代时,聚类个数P=12时的主发转子电流进入稳定状态的时间,要短于P=10及P=15的时间。另外,聚类个数不同时,种群的进化代数之间没有可比性。例如,在第50代,P=12对应的稳定时间要长于P=10对应的稳定时间;在第80代,P=12对应的稳定时间要短于P=10对应的稳定时间。
为了对比FIGA算法与GA算法在三级无刷交流发电机PID参数优化过程中的运行效率,在相同参数设置下,观察两种算法运行到相同代数时,种群中的最优个体、最优个体对应的系统稳定时间及算法整体的运行时间。由表1可见,在运行到相同代数时,两种算法找到的最优解对应的适应度相差不大。例如,第40代时,GA算法最优个体(0.005 2,0.019 5,0.029 4)对应的系统稳定时间为0.68 s,FIGA算法最优个体(0.006 4,0.018 2,0.031 8)对应的系统稳定时间为0.73 s;第80代时,GA算法最优个体(0.001 2,0.021 8,0.019)对应的系统稳定时间为0.26 s,FIGA算法最优个体(0.001 1,0.021 3,0.016)对应的系统稳定时间为0.27 s。

表1 GA与FIGA寻优结果Table 1 GA and FIGA optimization results
然而,尽管两种算法在参数设置、寻优代数相同条件下,找到的最优个体及其适应度比较接近,但系统实际运行的时间却相差很大。例如,运行第80代时,GA算法花费的时间约为4 min 39 s,FIGA算法花费的时间约为1 min 52 s,两者差距较大。这主要是由于FIGA算法对种群中100个个体进行了聚类,每类中只实际仿真验证了精英个体适应度的值,其他个体的适应度是基于适应度估计获得的,节约了大量的仿真评估时间。
3 结 论
三级无刷交流发电机仿真系统能有效地模拟负载功率及转速变化条件下,航空发电机电源模块的工作特性;提出的基于适应度继承的遗传算法能有效地对GCU模块的PID参数进行优化,并较大地缩短仿真系统寻优时间;该算法提高了传统进化算法在仿真确定高复杂性适应度函数时的运行效率。
