倾转旋翼无人机过渡段纵向控制策略设计研究
2021-12-02肖斯奇施啸宇
肖斯奇,余 帆,施啸宇
(南京航空航天大学自动化学院,南京 211100)
0 引言
直升机具有垂直起降、空中悬停、低空低速飞行、后飞以及侧飞等独特的飞行能力,但是其飞行速度低、航程短[1]。固定翼飞机具有高速巡航能力,但是对于起降跑道要求较高。倾转旋翼无人机则兼备固定翼与直升机的优点,是一种能够垂直起降、空中悬停并且快速飞行的飞行器[2-3]。
近年来,我国十分重视倾转旋翼机相关技术的研究,国内不少高校和研究所也进行了相关的理论探索。郭剑东基于H∞回路的控制思路,设计了小型倾转旋翼机过渡模式控制律,使控制系统具有较好的鲁棒稳定性[4]。沙虹伟基于反馈控制器内/外回路结构和特征结构配置的思路,设计了XV-15倾转旋翼机的姿态控制器,在MATLAB/Simulink 仿真环境中取得了较好的效果[5]。韩丽敏针对过渡模式具有高阶非线性和不确定动态特性的问题,提出了采用神经网络动态逆自适应控制方法设计制导律,并通过仿真验证了其控制器设计的有效性[6]。
然而很多先进的控制方法仍然停留在理论仿真阶段,方法过于复杂,难以实现工程化应用[5-6],同时针对小型航模机的控制思路在工程型号机上也无法完全适用[4]。目前,国内在400kg级以上的倾转旋翼无人机型号研发方面,尚无研制成功的报道。
本文研究对象来源于国内某研究所的400kg级倾转旋翼无人机预研项目[7],以工程型号机的研发为基础,沿用经典控制理论的设计思路,从无人机气动力学变化规律出发,设计了倾转过渡方案与纵向过渡控制策略,通过非线性半物理仿真验证了策略设计的合理性,并将控制律以及控制策略应用在无人机嵌入式平台上,从而实现对象无人机的全过程飞行试验。
1 问题描述
1.1 研究对象描述
对象无人机在固定翼机翼两端各安装了一套可在水平和垂直位置跟随发动机短舱转动的倾转旋翼组件。以短舱角βM表示发动机短舱与机体的夹角,无人机以直升机模式起飞并转入前飞,此时短舱与机体垂直(βM=90°)。当速度达到一定数值后,旋翼随短舱开始向前倾转,无人机进入过渡模式(0°<βM<90°)。当短舱转过90°后,旋翼作为螺旋桨,无人机进入高速飞行的固定翼模式(βM=0°)[8]。图1所示为对象无人机飞行示意图。

图1 倾转旋翼无人机飞行示意图Fig.1 Flight diagram of tilt rotor UAV
对象无人机拥有两套操纵舵面,其中旋翼操纵舵面包括总距、纵向周期变距和横向周期变距,气动操纵舵面包括升降舵、襟翼和方向舵。三种飞行模式下各通道操纵方式如表1所示。
1.2 过渡过程
倾转旋翼无人机过渡阶段可以在爬升/下滑或者平飞状态下完成,而平飞过渡不需要考虑高度轨迹的变化,降低了过渡模式控制策略技术研究的难度。故本文重点研究了对象无人机平飞过渡模式,根据对象无人机过渡阶段操纵特性的变化规律,可以将过渡模式的飞行过程划分为变距操纵段和气动操纵段。其中变距操纵段是指以旋翼的纵向变距和总距操纵为主的飞行阶段,根据气动特性的区别又可进一步划分为悬停小速度前飞段、旋翼操纵段和气动过渡段;气动操纵段是指不依赖旋翼纵向变距控制,以气动舵面操纵控制为主的飞行阶段[9]。整个过渡模式的纵向剖面飞行过程如图2所示。

表1 倾转旋翼无人机操纵控制方式

图2 过渡过程示意图Fig.2 Diagram of transition process
(1)变距操纵段
a)悬停小速度段
无人机首先进入悬停小速度前飞状态,借助旋翼纵向周期变距使得飞行器加速至目标巡航速度,确保飞行器能够以安全的速度过渡进入到下一飞行阶段。
b)旋翼操纵段
旋翼操纵段短舱倾角相对较大,旋翼拉力是飞行器的主要升力来源,短舱倾转将产生较大的加速度,加速/减速效果明显。气动舵面的舵效相对较低,不具备较强的控制能力。
c)气动过渡段
气动过渡段升力的主要来源从旋翼拉力逐渐过渡至机翼升力,升降舵舵效不断增强和短舱倾角的不断减小使得旋翼桨毂相对于重心的距离不断变化,导致旋翼纵向周期变距对于俯仰的操纵能力逐渐减弱。
(2)气动操纵段
气动舵面操纵段飞行器速度相对较高,气动舵面的舵效相对较强,升力来源以机体气动力为主,旋翼拉力相对较小,旋翼轴倾斜产生的加速度相对较小。飞行过程中可以通过总距调节旋翼拉力在速度方向的分量,但是短舱倾角的减小导致旋翼纵向周期变距对俯仰操纵的能力有限,因此气动舵面操纵段以旋翼总距和气动舵面操纵为主。
2 过渡模式特性分析
2.1 气动特性分析
过渡过程中由旋翼拉力与机体气动力共同克服重力,图3所示为两者在升力中的占比随短舱角βM的变化曲线。可以看出,当短舱倾角相对较大时,旋翼拉力对总升力的比值相对较大,短舱倾转对于高度轨迹的影响相对较大;当短舱倾角较小时,旋翼拉力对总升力的比值减小,短舱倾转对于高度轨迹的影响较小[10]。其中:
1)当90°≤βM≤80°时,旋翼拉力占比超过70%,飞行器升力主要由旋翼拉力提供,该阶段属于旋翼操纵段;
2)当80°≤βM≤50°时,旋翼拉力的占比逐渐减小,短舱倾角处于70°~75°之间,两者曲线存在交点,此时飞行器升力由旋翼拉力与机体气动力共同提供,该阶段属于气动过渡段;
3)当50°≤βM≤0°时,机体气动力占比超过70%,飞行器升力主要由气动力提供,该阶段属于气动操纵段。
基于上述分析,选取短舱角βM为90°、80°、50°和0°作为过渡过程典型工作点。

图3 旋翼力和气动力占比变化曲线Fig.3 Curves of rotor force and aerodynamic force proportions
2.2 操纵特性分析
以典型工作点为基础,绘制总距、纵向变距与升降舵在不同短舱角下对速度与高度变化率的操纵响应曲线,如图4所示。
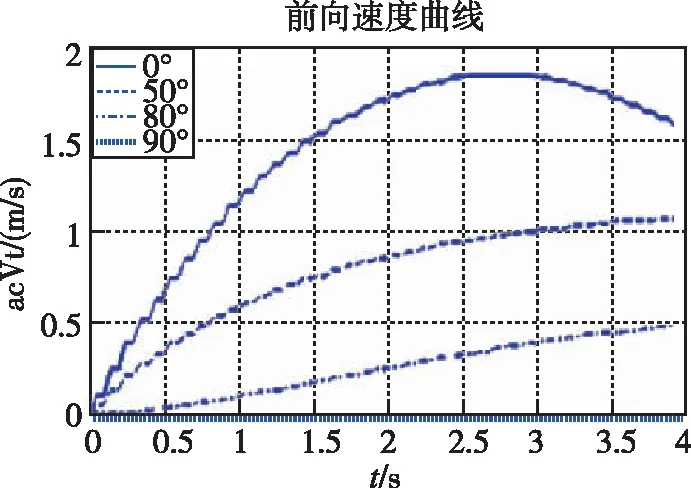
(a) 总距到前向速度操纵响应

(b) 纵距到前向速度操纵响应
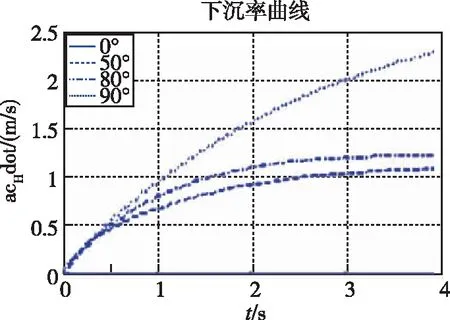
(c)总距到高度变化率操纵响应
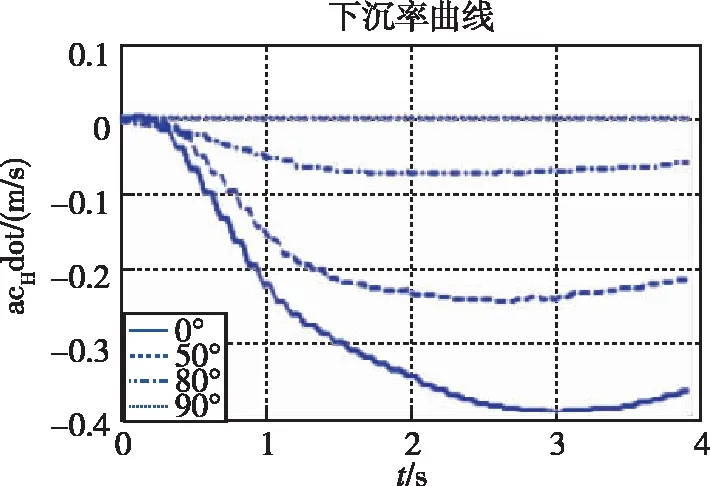
(d) 升降舵到高度变化率操纵响应图4 过渡段操纵响应曲线Fig.4 Control response curve of transition section
分析上述响应曲线可以得出以下结论:
1)对于速度通道而言,随着短舱角的减小,总距对前向速度Vx的操纵能力逐渐增强,βM为0°时1°总距能引起2m/s的速度响应;相反,纵向变距对速度的操纵能力随着短舱角的减小而逐渐减弱,βM在50°以后纵向变距几乎无法引起速度响应。
2)对于高度通道而言,短舱角在50°以后升降舵对下沉率有了一定的操纵能力,1°升降舵能够引起-0.2m/s的下沉率响应,但是总距对垂向速度Vy的操纵能力在50°时依旧要比升降舵强。
综上所述,随着短舱角βM从90°变到0°,纵向周期变距的舵效在逐渐降低,升降舵舵面在逐渐增强。而总距对速度与高度通道都有影响,对速度的操纵能力随短舱角的减小而增强,高度通道相反。
3 倾转过渡方案设计
3.1 短舱倾转方案
为保证倾转过渡过程的安全稳定,短舱应保持连续且单调作动。因此,短舱倾转的平滑过渡方案确定为:
1)根据过渡各个阶段特性变化实时调整倾转速率;
2)倾转速率的设计应遵循先慢后快的原则。
各阶段倾转速率设计过程如下:

(1)

图5 加速度变化曲线Fig.5 Acceleration curve

图6 速度变化曲线Fig.6 Speed curve
结合上述公式与变化曲线对过渡过程各个阶段的短舱倾转速率进行设计。由于悬停小速度段短舱维持90°不变,故主要考虑旋翼操纵段、气动过渡段和气动操纵段。
(1)旋翼操纵段
该阶段无人机特性接近于常规直升机,为保证速度轨迹的跟踪效果,该阶段设计倾转速率时应尽可能小,否则旋翼拉力在垂向上的分量会急剧减小。同时该阶段速度较小,相对应的动压也较小,气动力不足以弥补升力的损失,过快地倾转会出现掉高的情况。另外,旋翼轴倾转提供的加速能力有限,过快地倾转会导致速度指令跟踪效果变差,从而偏离过渡轨迹,而速度的剧烈变化会带来飞机姿态角的振荡,进一步影响飞行安全。
(2)气动过渡段
当短舱角βM转到80°以后,无人机进入气动过渡段,此时短舱角逐渐减小,速度逐渐增加,速度变化区间为20~35m/s,加速度变化区间为0.25~1.2m/s2。该阶段短舱角变化范围为30°,旋翼拉力逐渐减小,旋翼轴的倾斜对高度的影响逐渐减弱,转而开始对速度产生影响,同时加速度变化逐渐放缓,相较于旋翼操纵段,该阶段的加速度变化趋于平稳,无人机有相对充足的时间进行加速,因此倾转速率可以相应增大。
(3)气动操纵段
当短舱角转过50°以后,无人机进入气动操纵段,此时短舱角相对较小,速度较大,但是速度变化区间仅为40~45m/s,加速度变化区间为0.25~0.8m/s2。该阶段无人机特性接近于固定翼飞行器,旋翼轴的倾斜对高度的干扰相对于气动过渡段变得更弱,但是对速度变化影响较大。此时只需要较小的速度变化即可保持无人机平飞,主要矛盾从速度轨迹的跟踪转变成为尽快脱离不稳定的过渡阶段,因此倾转速率的设计相对于气动操纵段应更大。
最终设计结果如式(2)所示

(2)
3.2 操纵舵面分配方案
因为对象无人机兼具直升机与固定翼的操纵特性,尤其是在过渡模式,需要旋翼舵面与气动舵面的协同操纵[11]。为了实现过渡段的稳定控制,针对不同阶段特性变化,提出了以下操纵舵面分配方案:
1)旋翼操纵段由于飞行速度较小,气动舵面舵效低,操纵方式类似于横列直升机,无人机通过调节旋翼纵向周期变距使得旋翼桨盘倾斜,产生前向/后向分力,实现加速/减速过程,通过改变总距以调节旋翼拉力的大小从而实现高度的控制,升降舵仅控制姿态回路;
2)气动过渡段飞行速度逐渐增大,升降舵效率逐渐增强,高度回路由总距通道主控,升降舵作为辅助,此时纵向变距对速度仍有一定的操纵能力,故保持对速度回路的控制;
3)气动操纵段飞行速度大,此时旋翼退化为螺旋桨,纵向变距对速度已经没有操纵能力,故纵向变距退出速度回路,总距通道接管速度回路,升降舵成为高度回路的主控通道。
过渡段纵向操纵舵面分配方案具体如表2所示。

表2 过渡段纵向操纵舵面分配表
4 过渡段纵向控制策略设计
4.1 旋翼操纵段控制策略
旋翼操纵段以旋翼的变距操纵控制为主,其操纵特性和直升机前飞状态具有相似性,故可参考直升机悬停小速度段控制律结构[12]。对于气动舵面而言,由于旋翼操纵阶段飞行速度相对较小,升降舵效低,对飞行状态影响不大。为简化控制系统设计的复杂度,防止后续突然接入升降舵控制导致升降舵跳跃,此处可提前接入升降舵的姿态控制。具体控制律结构如下
(3)
其中,δz表示纵向变距;V表示平飞过渡的速度;ϑc表示俯仰角指令。由于直升机模式具有空速测不准的特性,因此其速度控制采用基于地速的控制策略。俯仰角回路作为速度控制回路的内回路,用于改善速度控制系统的阻尼。
δc表示总距。通过总距通道来实现高度控制,采用阻尼内回路的高度控制方案,总距配平作为前馈部分,用以加强控制律的环境适应性,引入积分环节以提高扰动情况下高度控制的精度。
δe表示升降舵偏。旋翼操纵段飞行器速度小,升降舵效率低,仅接入俯仰回路用于防止下个阶段控制律结构变化导致的舵面突变。
4.2 气动过渡段控制策略
气动过渡段是旋翼变距和气动舵面的综合控制阶段。随着短舱倾角的不断变化,升力来源在旋翼拉力和机体气动力之间进行过渡切换,无人机气动特性发生强烈变化,但纵向变距仍具备一定的控制能力。同时,升降舵因机体速度变大而具备了一定效率,可以接入高度外回路来辅助总距通道控高[13]。具体控制律结构如下
(4)
与旋翼操纵段相比,总距通道控制律结构没有发生变化,纵向变距通道的控制对象由地速切换为空速。尽管纵向变距和总距操纵之间存在较为明显的纵垂向耦合,但是因为总距通道和速度通道之间的自动配平功能,能够及时抵消这种耦合造成的控制偏差。
升降舵对高度的控制采用姿态增稳和高度保持的并联控制结构,姿态控制回路是高度控制的阻尼回路,用于避免高度的振荡。高度积分的引入能够适应飞行过程中的各种不确定性,实现自动配平的目的。
4.3 气动操纵段控制策略
气动操纵段控制策略相比于气动过渡段有着较大的变化[14]。首先,随着短舱倾角的减小,纵向变距对速度逐渐失去操纵能力,故将其退出速度控制通道
δz=0
(5)

(6)
最后,无人机在该阶段飞行速度相对较高,气动舵面舵效得到增强,升降舵具备足够的控制飞行轨迹的能力,因此升降舵成为高度的主控通道,控制律结构如下

(7)
5 过渡模式飞行仿真验证
以对象倾转旋翼无人机非线性六自由度飞行动力学模型为例进行半物理仿真验证。对象无人机以直升机模式起飞,加速前飞至5m/s时进入倾转过渡模式,依次经过旋翼操纵段、气动过渡段和气动操纵段,前飞速度持续增加,最后以40m/s的速度结束过渡,进入固定翼巡航模式。过渡过程仿真曲线如图7所示。

(a)飞行速度变化曲线

(b)高度变化曲线

(c) 总距角变化曲线

(d) 升降舵变化曲线

(e)纵向变距变化曲线

(f) 短舱倾角变化曲线图7 过渡过程仿真曲线Fig.7 Transition process simulation curve
观察仿真曲线结果可知:所设计的控制策略可以使飞行器很好地跟踪前飞速度与高度指令,其中速度误差不超过±2m/s,高度偏差也在±2m以内。在过渡模式的旋翼操纵段、气动过渡段与气动操纵段下,都能达到良好的控制效果,促使对象无人机稳定过渡。同时,纵向操纵舵面情况良好,变化幅度适中,能够验证倾转过渡方案的合理性与过渡控制策略的有效性。
6 总结与展望
与既往追求理论的先进性发展不同,工程应用往往要求基础扎实。PID控制具有物理意义明确、模型容忍度高、鲁棒性好、工程应用性强的优势。故本文突破性地将理论结合工程实际,针对倾转旋翼无人机过渡模式的纵向控制问题,从经典控制理论角度出发,以过渡模式特性分析为基础,根据过渡模式3个阶段的特性区别,逐段设计了短舱倾转方案、舵面分配策略以及纵向控制律结构,完成了过渡模式纵向控制策略的设计,并通过非线性仿真验证了控制策略的有效性,最终成功应用于对象无人机的首飞试验中,实现了国内首架倾转旋翼无人机全过程飞行试验。
未来还需要在以下几个方面开展倾转旋翼无人机过渡段的研究:
1)过渡阶段的横侧向控制技术。相比于纵向的操纵舵面,横侧向在过渡过程中有着更为复杂的耦合,为了保证过渡阶段的飞行安全,有必要有针对性地研究横侧向的控制问题。
2)爬升/下滑过渡技术。从工程实际的角度出发,爬升/下滑过渡才是倾转旋翼无人机真正的工作模态。相较于平飞过渡模式,爬升/下滑过渡在考虑速度轨迹跟踪的同时,还要考虑高度控制的相关问题。
针对以上问题,一方面,可以考虑采取纵向类似的余弦函数对横侧向的操纵舵面进行解耦;另一方面,针对过渡阶段的高度跟踪问题,可以参考固定翼无人机爬升/下滑控制策略进行改进。
