智能控制五十年回顾与展望:傅京孙的初心与萨里迪斯的雄心
2021-12-01王飞跃
王飞跃
五十多年前,美籍华人傅京孙教授(见图1)在IEEE自动控制汇刊上发表长文[1],全面深入地综述并展望了学习控制的现状与未来.之后,他意犹未尽,于1971年初又补充了一篇短文[2]“学习控制系统与智能控制系统:人工智能与自动控制的交叉”,进一步讨论人工智能方法与技术在控制和自动化中深入且系统化的应用之途径.就是这篇短文,正式开启了“智能控制(Intelligent control)”这一崭新的多学科交叉研究领域.

图1 智能控制之父傅京孙与萨里迪斯Fig.1 The father of intelligent control:Fuand Saridis
尽管在文献[2]之前,已有许多人提出将人工智能与自动控制结合,甚至已有“人工智能控制(Artificial intelligence control)”的说法出现[3],特别是在机器人系统的研究方面,控制理论与人工智能更是早已被密切地联系在一起[4−6].但在科学文献上,是傅京孙第一次提出“智能控制”一词并给出清楚的定义,认为人工智能与控制工程的有机结合,必将导致从学习控制到智能控制的自然延伸和发展.傅京孙的远见和愿景,激发了研究人员对智能控制的广泛兴趣,成为推动此领域研究的催化剂.
随后,从70年代初直到90年代中期,傅先生的同事萨里迪斯教授(见图1)及其学生以信息论中的熵概念为核心,引入运筹学和决策论,提出了智能控制系统的分层递阶结构和学习算法,阐述了传统控制、学习控制、自组织控制、自适应控制、机器人控制和智能控制之间的天然联系(如图2所示),并组织相应专业学会、研讨会、国际学术会议与期刊,为这一新兴领域的早期发展与成长壮大作出了重要贡献[7–15].
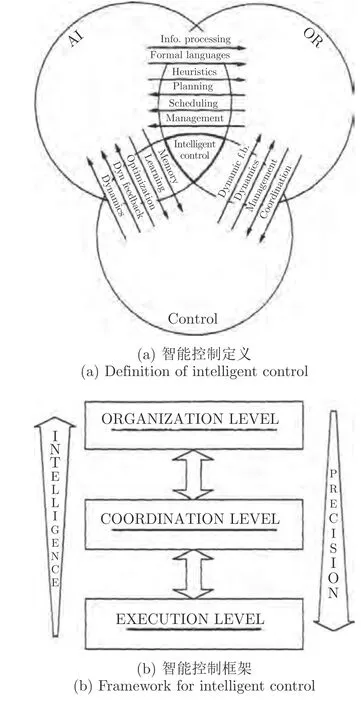
图2 智能控制学科的定义与框架Fig.2 Saridis' inspiration for intelligent control
实际上,智能控制与人工智能同根同源,是智能方法走向应用进而完成其最终改造世界之使命所必不可少的一个重要且关键性环节[16−17].同人工智能一样,关于智能控制的原始思想和实践可以追溯到人类发展历史的早期,因为探索智能并利用相关成果去认识和改造世界是人的天性.上世纪30 年代提出的图灵机和随之兴起的自动机研究热潮,加之维纳的控制论及其伴生的人工智能,特别是学习机器和学习控制的理论普及和应用深入,促使人工智能控制、智能自动机、移动自动机等概念和原型系统应运而生,最终形成了智能控制这一独立的研究应用领域.
今天,深度学习[18]、宽度学习[19]、对抗学习[20−21]、平行学习[22−23]等新智能算法已将人工智能的研究与应用推向了一个新的历史水平,引发世界范围的关注与兴趣.针对这一重大发展机遇,为了确保创新型国家和科技强国的建设,中国国务院于2017 年7 月20 日发布《新一代人工智能发展规划》,明确提出许多智能控制的研发要求,包括自主协同控制、优化决策、平行控制与管理等[24].一方面,智能控制的发展可以极大地促进我国新一代人工智能发展进程;另一方面,智能控制的研发是实现智能制造、建设制造强国之根本.无论是流程工业智能化、离散过程智能化、网络化协同制造智能化,还是生产全生命周期活动管理智能化,智能控制都是其从信息化和自动化迈向智能化的基础和核心,是实现智能工厂企业和智慧社会的必要条件.
值此智能控制50 周年华诞之际,本文将基于个人的经历和认识,对人工智能和智能控制的早期历史加以梳理,并对其未来的发展予以展望,以期促进这一领域的进一步发展和更加繁荣昌盛.
1 智能起源:Being vs.Becoming
本质上,人类的文明史就是人类智能的演化历史.古代中国《诗经》 的赋、比、兴之文学表现手法,古希腊柏拉图《对话录》 的文法、逻辑、修辞之哲学辨证方法,都是人类智能知识化的早期展现.在人类发展的第一轴心时代(Axial age),人类经历了自己的人性大觉醒,哲学由此而兴[25−26].中文的“哲”字之基本释义就是“智慧”,而古希腊哲人更是直截了当地把“爱”与“智慧”的组合作为“哲学”一词的定义及哲学作为一门学问的目的.显然,智能的研究与哲学的探索同根同源,同为热爱与追求智慧而生.
在西方文明的语境中,古希腊的“七贤之首”泰勒斯(见图3)是“哲学和科学的始祖”、“古希腊第一位数学家”,提出了“世界的本原是什么?”之问题和“万物源于水”之回答,还是物理、天文、几何、逻辑推理等的开启者.作为唯物主义传统的开创者,泰勒斯认为“水是最好的”、“万物有灵”.其学派传人赫拉克利特开创了朴素的辩证思想,但相信“万物源于火”.毕达哥拉斯认为“万物皆数”,赫氏由火引申出“万物皆流”与“万物皆动”,而且“对立统一”、“和谐”一致,使“变化(Becoming)”成为哲学的第一个核心理念.赫氏强调变化,而且“斗争是产生万物的根源”,由此成为最早的“过程哲学家”.另一学派的巴门尼德(见图3)创造了基于“逻各斯”的形而上学论证形式,认为世界的本原是单一不变的,开启了唯心主义的传统,并使“存在(Being)”成为“Becoming”后的另一个核心且更基本的哲学理念.他认为,存在,即Being,才是“真理之道(The way of truth)”;变化,即Becoming,只是“观点之道(The way of opinion)”.因为,只有存在(Being)才是永恒、不动、连续不可分、唯一的真实,只有这样的抽象理念才可以被思想;而变化(Becoming)涉及感性世界的具体事物及其改变,是不真实的存在,是假象,所以不能被思想.巴门尼德坚信没有存在之外的思想,被思想的东西与思想的目标是同一的,这与近代哲学家笛卡尔的“我思故我在”几乎同出一辙,开启了唯物与唯心、逻辑与计算、Being 与Becoming 的哲学之争.实际上,这一哲学论争,自始至终贯穿在智能研究的历史之中[27–33].
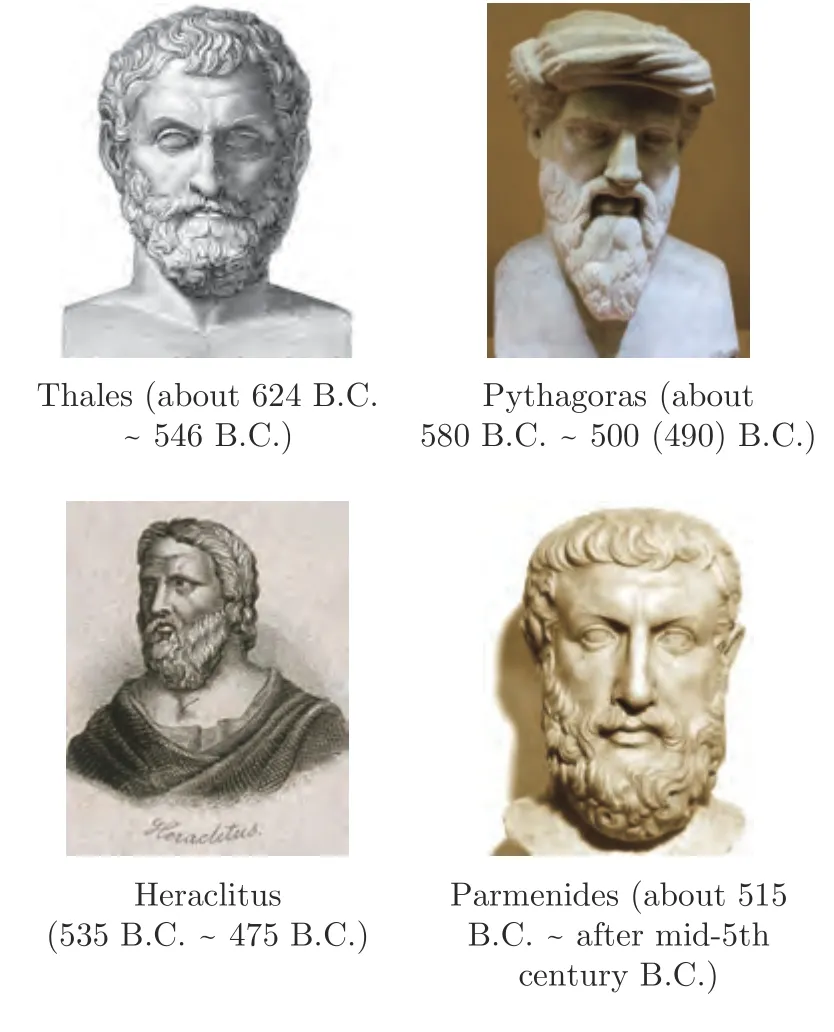
图3 古希腊哲学与科学思想的起源Fig.3 Ancient Greek philosophica/scientific thoughts
在这些思想的影响下产生了“希腊三贤”(见图4),即苏格拉底、柏拉图和亚里士多德,师生三代相承奠定了西方哲学和科学的基石.首先,柏拉图将苏格拉底身体力行的对话辩证方式记录下来,发明了书写形式的辩证方法,而且认为宇宙是由实体的永恒真实之理念世界(Ideals,theory of forms)及其影子的暂时变动之物质世界组成,开启了后来世界由“物质实体”和“精神实体”构成的二元论和客观唯心主义哲学.其次,亚里士多德将柏拉图的虚实二体一体化,并以“三段论”将其辩证法抽象为形式逻辑,不但成为现代逻辑的基础,更是现代人工智能和智能科学的基石,开创了科学逻辑推理的理性传统和唯物辩证法的哲学思想.其格言“人类是天生的社会性动物”与马克思“人是一切社会关系的总和”之观点一致,是未来智能科学特别是系统化智能科技发展的指南.
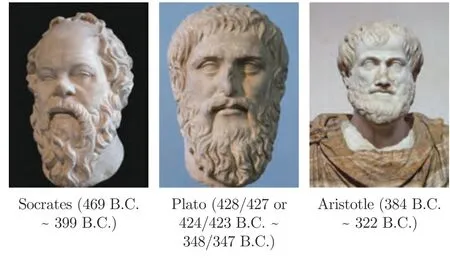
图4 希腊三贤:第一轴心时代西方哲学和科学的奠基者Fig.4 The three sages of Greece:Founders of western philosophy and science in the first axis age
在第二轴心时代,欧洲文艺复兴,人类理性大觉醒,产生现代科学.首先是以笛卡尔、斯宾诺莎和莱布尼茨(见图5)为代表人物的理性主义哲学之兴起,其次是以伽利略、牛顿(见图5)和莱布尼茨为主要开拓者的物理数学之现代化进程的开始.特别是牛顿与莱布尼茨之间,差不多是柏拉图与亚里士多德之间关系的相反,不但共同发明微积分,而且都是计算主义者.莱布尼茨还坚信思维和逻辑推理也可以计算,认为存在(Being)中“万物皆数”还不够,还必须在变化(Becoming)里“万理可推”.为此,他试图将其发明的二进制与中国古代的阴阳八卦相联系,并认定古中国的原始象形文字与其创造的“普适语言(Universal characteristic)”在思想上一致,希望由此发明“理性逻辑者的微积分(Calculus ratiocinator)”,而不只是普通的微积分.这些努力最后成就其“精神的原子”Monad 之理念,然而却“不幸”被后人演化成“单子论(Monadology)”的哲学.有幸的是,在人工智能兴起的前夕,范畴(Category)数学出现,Monad 继而成为这一新数学的核心理念,将来或许成为面向智能科技的新一代数学之基础[27–30].
图5 第二轴心时代西方哲学与科学奠基者Fig.5 Founders of western philosophy and science in the second axis age
此后,以德·摩根、巴贝奇和布尔为代表的“英国三杰”(见图6)以“三位一体”的方式大大推进了计算逻辑和思维之机械化、数字化和形式化的进程,为后来希尔伯特(见图7)的新几何观及其数学纲领、图灵的自动机和弗雷格的数理逻辑理论奠定了基础和进一步提升的台阶.特别是布尔于1854 年发表的《思维定律》,集亚里士多德到莱布尼茨的逻辑思想于大成,由二进制衍生出布尔代数,开启了符号和数学逻辑的现代化进程,为现代电路和计算机设计、信息化和智能化提供了理论和方法基础[32−33].
图6 现代计算、逻辑和智能科学的开拓者Fig.6 Pioneers of modern computing,logic and intelligent science and technology
2 人工智能:自动机与控制论
20 世纪的第一年,德国数学家希尔伯特怀着确立德国数学世界地位的历史使命,在巴黎举行的第二届数学家大会上提出影响至今的“23 个问题”.然而,影响更加深远的却是会上作为形式主义代表的他与直觉主义代表的法国数学家庞加莱(见图7)之争,不但改变了数学的历史,而且无意之间播下了人工智能这一学科的种子,这就是希尔伯特数学机械化的思想.
图7 人工智能的数学推动力Fig.7 Mathematical origin of artificial intelligence
希尔伯特相信,整个数学体系都可以严格公理化.而且,整个数学是完备的:其中每一个数学命题都有一个数学证明;整个数学又是一致的:导出的每一个数学命题在不会自相矛盾的同时,整个数学还是可决策或可判定的,就是所有的数学命题都可以利用有限次正确的数学步骤进行判定,因此存在通过有限程序最终判定一个数学命题对错的“算法”.简言之,就是整个数学具备“都有、都对、都行”的三大保证:告之公理、予之定理,一个不剩,一个不错,并且可以机械化进行.这就是后来称之为“希尔伯特纲领”的宏大愿景.
从人工智能的角度来看,希尔伯特希望得到的,远超过今天信仰通用人工智能之人士的梦想,准确地反映了刻在其墓志铭上的钢铁般意志:“我们必须知道,我们必将知道”.相当程度上,希尔伯特与庞加莱之争,反映了后来人工智能研究中基于符号的逻辑智能与基于认知的计算智能两条路线之争.当时,庞加莱认为:除了逻辑、推理之外,人的作用,特别是人的直觉,在数学中具有不可动摇的地位.但希尔伯特的观点,让当时的许多数学家,特别是年轻人“热血沸腾”,激辩之余,更激动万分,他们的口号是:“打起你的背包,到哥廷根去!”,投入这场数学革命,构造新世纪宏伟的数学大厦.或许,希尔伯特的学生外尔的描述更加生动准确:“希尔伯特吹响了他的魔笛,成群的老鼠纷纷跟着他跃进了那条河”.问题是哪条河? 什么河?
罗素就是这些年轻数学家中最杰出的代表之一.听到希尔伯特报告之前,他一直担心数学大厦即将倾倒,认为是建在危险的地基之上,这就是后来被称之为“罗素悖论”的集合论矛盾.在从巴黎大会返程的船上,罗素就开始同自己的老师怀德海(见图7)策划,如何为希尔伯特的想法构造坚强的逻辑基础.罗素坚信亚里士多德的原始逻辑定义:逻辑就是“新”和“必须”的推理,“新”在于逻辑让我们学到未知的,“必须”是因为其结论是不可避免的.
结果就是罗素和怀德海费尽十年心血成就的三卷本《数学原理》,书名与牛顿的不朽之作自然哲学中的《数学原理》 同名.或许在罗素心里,牛顿的《数学原理》 把一个机械的世界化为按物理定律运行的数学世界,这次他们要把这个数学世界再化回由算法控制的机械世界,形成一个完美的闭环世界,就是今天我们追求的智能世界.
《数学原理》 的问世,改变了当时许多学者的研究生涯特别是在科学相对不算发达的美国,反响更大.维纳、麦卡洛克、皮茨(见图8)就是当时三位因此书而改变命运并走到一起研究智能的美国学者.维纳原本对生物研究感兴趣,读博士时开始研究哲学,读了《数学原理》 后专攻数理逻辑,毕业后赴剑桥随罗素进一步深造,后多次赴欧与数学家哈代和希尔伯特学习合作,并因此在上世纪20 年代中期就结识了希尔伯特的助手冯·诺伊曼和邱奇等年轻学者.麦卡洛克大学时就潜心学习《数学原理》,认为大脑最顶层的神经元之间相互连接的方式同《数学原理》 中描述的逻辑关系一致,自己还从心理学转行专门研究大脑,后来在耶鲁勾画了世界上第一张大脑皮质的机能解剖图,并赴芝加哥建立大脑实验室.皮茨更是传奇般地因为《数学原理》 而从社会底层的一个连小学都没有毕业的少儿一跃成为罗素和麦卡洛克的朋友,最后成为维纳的博士生,一起制造了智能科学发展史上一段令人感叹、使人心碎的历史悲剧.

图8 计算智能与人工智能的“金三角”Fig.8 Gold triad in artificial intelligence and computing intelligence
维纳从1925 年开始与布什合作研究计算机,并在布什的帮助下招收李郁荣(见图9)为他的第一个博士生可能也是唯一的工程博士,一起展开各种模拟网络的研究[34].然而,与布什不同,维纳认为计算机应当基于数值而非模拟信号,二进制而不是十进制,但布什对此不太确信,二人之间因此产生分歧.在李郁荣的帮助下,维纳对于反馈,特别是负反馈和电路网络中的循环因果现象产生了极大的兴趣.除了两人一起发明了李−维纳网络并由此延伸成为现代通信技术的基础,还萌生了“受负反馈和循环因果逻辑支配的有目的性的行为”是实现智能之本质的思考,成为后来创立控制论的重要因素.维纳曾希望在清华大学研究计算机,因向MIT 采购器件的建议被布什否决而作罢,但他仍把自己于1935 年~1936 年在清华大学与李郁荣合作这一时期视为控制论的创立时间,正是这一情况的反映.回美之后,维纳在冯·诺伊曼家里住了4 天,介绍了他同布什关于计算机的合作和他在清华大学的工作,并推荐冯·诺伊曼赴清华大学访问,却因卢沟桥事变未能成行.维纳后来回忆:“在我的职业生涯中,如果说有一个分界线,标志着从科学学徒到一定程度上能独当一面的大师,那么我认为是1935 年的中国之行.”
图9 维纳的朋友圈:生理、通信、认知Fig.9 Friends of Wiener
麦卡洛克是1942 年5 月在梅西基金的一个交叉学科研讨会议上,从维纳的好友罗森布鲁斯(见图9)博士了解到维纳和他的团队关于循环因果的思想和研究,立即意识到这种新的因果关系不但支配着生物和机器的有目的性行为,而且还为解决一直困惑他的神经元模型中时间表示问题提供了思路.实际上,循环因果对他再自然不过,因为大脑中的神经元只能首尾相连,所以在他眼里也只能因果循环.梅西会后回到芝加哥,他立即同皮茨讨论,在维纳、罗森布鲁斯和维纳助手毕奇洛(见图9)三人于著名的《科学哲学》 上发表目的论(Teleology)的短文[35]后不久,他们也共同发表了关于人工神经元的“McCullock-Pitts”模型[36].1943 年的这两篇文章,分别开启了认知科学和神经元网络的研究,是计算智能的奠基性工作,更是今天我们有深度学习和AlphaGo 技术的原因[37].
与其在美国的影响效果相反,《数学原理》 在欧洲大陆唤起了三位年轻的数学天才,结果却使希尔伯特宏图轰然塌陷.先是1930 年哥德尔(见图10)把研究《数学原理》 作为博士论文课题,在希尔伯特发表“我们必须知道,我们必将知道”退休演讲两天之前的同一会场,宣布其“不完备定理”,用罗素和怀德海的逻辑体系证明希尔伯特的数学不可能完备又一致,而且人类真的在数学上有不可知的东西[38].紧接着,1936 年图灵在哥德尔工作的基础上提出图灵机,在不可推理之后定义了可计算问题,顺手解决了希尔伯特关于决策的第十问题[39].后来发现,在图灵之前,邱奇解决了同样的等价问题,不过用了递归函数和λ-Calculus 的概念[40],一时难以让人了解其真正意义,这就是后来图灵由剑桥赴美随邱奇攻读博士学位的原因.真正了解并向世人介绍和帮助哥德尔和图灵及其工作的第一人就是冯·诺伊曼,他为哥德尔在普林斯顿高等研究院谋得一席之地,推荐图灵获得奖学金成为普林斯顿的研究生.
图10 逻辑智能的数学之源Fig.10 Mathimatical origin of logic intelligence
哥德尔的不完备定理,深刻地揭示了人类理性有限的本质,后来人工智能的4 位主要创始人之一的司马贺(见图11)不但获得计算机的图灵奖,还因在经济和管理中倡导“有限理性 (Bounded rationality)原理”获得诺贝尔奖,再次说明哥德尔工作的重要意义.由此,人类意识到其进一步的发展,必须突破自身理性的有限性,这就是人类智性的大觉醒,开发数据等人工世界资源的宏伟事业开始了,智能科学与技术涌现并兴起,人类进入了第三轴心时代[25−26].
图11 人工智能之父Fig.11 The fathers of artificial intelligence
二战期间,弹道计算与曼哈顿原子弹项目,特别是其推动的蒙特卡洛方法,使冯·诺伊曼认识到算力和计算机的重要性.二战结束前夕,他又了解了军方制造现代计算机的决心,因此把兴趣和精力开始向计算机转移,重新开始了同维纳的交往.1944年12 月,由维纳起草,冯·诺伊曼和哈佛数学家、研制Mark 计算机的负责人艾肯共同签名的邀请信发给了由维纳亲自挑选的学者,因为三人认为一场伟大的技术革命即将来临.因此,信中写到:“··· 感兴趣的人搞个聚会是件非常值得做的事情”.紧接着来了第二封信,三人提议为即将开展的宏大科学探索界定主题,就是维纳的“目的论新原则”,未来团队的名称也定为“目的论学会”,就是围绕“通信工程,即计算机工程、控制设备工程 ··· 神经系统的通信和控制”展开研究:“一方面致力于研究目的是如何在人和动物的行为中得以实现的,另一方面研究如何通过机械和电子的方法模拟目的”[41].
1945 年1 月6 日至7 日,“目的论学会”在普林斯顿高等研究院开会,维纳对此兴奋不已,用MIT副校长基利安秘书的评论就是,维纳“可真的是春风得意”[41].他和冯·诺伊曼成了会议的主角,但这场革命的企图完全是在维纳的影响和科学思想启发下进行的.从某种意义上来说,这是1956 年达特莱斯人工智能会议之前关于智能与计算最严肃的一场学术研讨,其“失败”与“目的论”这个古怪哲学的名称直接相关.如果名字合适、不如此奇异,或许人工智能这一学科就会从1945 年开始算起.实际上,就智能科学史而言,这是一个十分值得研究的课题.
普林斯顿会议之后,出现了两个戏剧性的转折.一是维纳试图劝诱冯·诺伊曼到MIT 工作,担任数学系主任,有自己的实验室,全力推动计算机和目的论研究.二是冯·诺伊曼一方面让维纳感到其挖人计划即将实现,并使维纳得力助手毕奇洛成为自己研究计算机的主力工程师,但随即于1945 年6 月30 日推出自己关于电子计算机宏大的新计算机设计方案.这就是沿用至今的“冯·诺伊曼结构”.虽然这个方案的报告中只引了被当时主流神经和心理学家所忽视的麦卡洛克和皮茨的论文[36],但实质是冯·诺伊曼清理了维纳计算机构想中的目的论成分,仅保留机械电子的操作流程而已.
实际上,维纳于1940 年就向当时负责战时研发的布什书面提出研制现代计算机的“五项原则”,但没有得到回应.按照冯·诺伊曼自己的说法,其计算机就是第一台“将维纳提交给布什的五条原则整合为一的机器”.然而,此时冯·诺伊曼与维纳个人之间的关系已进入不自然状态,加上1947 年首次世界计算机大会之后,维纳一度成为计算机界的“公敌”,因此他更愿把计算机的功绩归于邱奇和图灵的思想,而不是维纳,因此成为“邱奇−图灵命题(Church-Turning thesis)”的积极倡导者,这就是为何美国军方和学界有人认为“冯·诺伊曼结构”应该称为“维纳−冯·诺伊曼结构”的原因[34].
维纳对此似乎没有十分介意,可能因为其希望并关注的,己经变为能够产生智能行为且受“目的论”指导的智能机器.在麦卡洛克的大力支持下,1946 年起维纳的主要兴趣已转移到梅西基金专为他资助的系列会议,由此偶然地创作了《控制论》一书,居然再次成为世界名人,引发世界性的控制论热潮,维纳的团队也成为世界关注的中心[41].
然而,当过了几年麦卡洛克赴MIT 加入维纳和早已成为维纳博士生的皮茨之后,维纳在没有任何公开迹象的情况下突然宣称永远断绝与二人的一切关系,使麦卡洛克和皮茨陷入绝境,一蹶不起,不久就从学术研究的世界消失.智能与认知研究的“金三角”顿失,这就是曾使许多人不解并远离维纳及其控制论的原因.
相当程度上,维纳留下的学术真空造就了“人工智能之父”麦卡锡(见图11).麦卡锡是1948 年在加州理工读大学时从冯·诺伊曼关于认知和维纳研究的讲座中了解控制论的,从而产生了兴趣.后赴普林斯顿数学系攻读博士,1951 年毕业.三年后,明斯基也在同系获得博士学位,论文就是关于随机神经网络SNARE 的研究[42].当时数学系有些教授认为明斯基的工作不是数学研究,还是冯·诺伊曼的一句话为他解了围:“今天不是,或许将来就是了”.
毕业后一段时间,麦卡锡热衷于自动机的研究,并与香农(见图12)合作编辑了自动机研究论文集.当时,关于可认知和可思维的智能机器之研究主要围绕控制论和自动机展开.在麦卡锡眼里,控制论太泛,又与维纳脱不了干系,而自动机太窄,过于数学化,不利于推广.因此,在1955 年向洛克菲勒基金会申请研讨经费的建议书中,他选择了“人工智能(Artificial intelligence)”一词来定义智能机器这一新兴的研究领域.人工智能会议于1956 年夏天在麦卡锡任助教的达特茅斯学院举行,最初计划10 人,包括维纳的前助手毕奇洛和学生Selfridge(见图12),但后来有近50 人声称参加过这一长达8 周的会议,有可信证据的就有20 余人(部分见图13).其中,4 人被认为是“人工智能之父”:麦卡锡、明斯基、司马贺和纽厄尔(见图11).香农与会的原因,除了他与麦卡锡的个人关系之外,很大原因是希望利用他的影响力以及他与维纳因通信和信息论成果归属问题而产生的矛盾,使人工智能远离维纳的影响.会上,司马贺一度希望说动大家把名字改为“复杂信息处理(Complex information processing)”,认为人工智能会让人有“欺骗”不实的感觉.幸好这一建议未被采纳,否则如此学究且难引注意的名字,或许这一领域就不会有今天的局面,遭受与“目的论”同样的命运.在此之后,一切都是大家熟知的人工智能历史.
图12 人工智能历史上的重要人物Fig.12 Important figures in artificial intelligence

图13 重逢于纪念50 周年人工智能Fig.13 Reunion at AI's 50th anniversary
达特茅斯会议之后,麦卡锡和明斯基前后都去了MIT,致力于人工智能研究,并开始了军方资助的MAC 项目.麦卡锡还将邱奇的λ-Calculus 开发成Lisp,成为人工智能的第一语言,被公认为人工智能数理逻辑学派的领军人物.后与明斯基产生分歧,麦卡锡赴斯坦福创立新的人工智能实验室,并与尼尔森一起成为逻辑智能的主要开拓者和捍卫者.今天的云计算技术,就是源自麦卡锡当年开拓并发展的分时系统.明斯基后来执掌MIT 人工智能研究,除了因对感知机的偏见而对神经网络研究造成了负面影响之外,他从认知科学的角度推动人工智能的发展,贡献巨大,特别是他在1986 年提出的智能体代理的思想,依然是今天多智能体和群体智能研究的基础[43].相当程度上,明斯基沿继了维纳的思想,是计算智能的引路人和开拓者.
1992 年,美国人工智能协会(AAAI,现改为国际人工智能促进会,缩写一样但内容已改)在加州硅谷举办首届机器人竞赛,我因自己的三位研究生是竞赛的志愿者而一同驱车参会,顺便访问斯坦福和伯克利的同事与朋友.与麦卡锡和尼尔森见面时,当麦卡锡知道我来自RPI 和亚利桑那的机器人与自动化实验室时,半幽默半严肃地告诉我:他选择人工智能一词而不是自动机或控制论,因为AI 也是智能自动化(Automation of intelligence)的缩写.我的回应是:作为人工智能的AI,主要是分析和认知世界,是“软”智能;作为智能自动化的AI,如智能机器人,是“硬”智能,其实这是当时许多研究人员的认识和共识.
在我的眼里,尼尔森是把人工智能从“文学”推向“科学”的最大功臣,尽管生前其成就没有得到充分的认识和承认.本人就是在读他人工智能的文章和著作中才真正了解和认识这门学科的[44−45].我曾力主尼尔森进入第一批“AI's Hall of Fame”,尽管他是其中唯一一名没有获得图灵奖的学者.在其退休之后,我曾多次去他家拜访,并邀请他于2015 年共同创办智能科学与技术学会(Association for intelligent science and technology,AIST),并翻译了他最后的一本著作[46],留下珍贵纪念(图14).

图14 2015 年尼尔森与王飞跃于俄州梅德福Fig.14 Nilsson and Wang at Medford,OR in 2015
3 智能控制:从学习控制到人工智能控制
实际上,在傅京孙于文献[2]中提出“智能控制”一词之前,Leondes 和孟德尔(Jerry Mendel)于1969 年在纪念维纳去世的文集中就发表了题为“人工智能控制”的章节[3].许多人据此认为智能控制应以此文算起,把1969 年作为智能控制的起点.然而,细读文献[3]不难看出,虽然文章名为人工智能控制,内容却完全是学习控制,主要是自组织学习控制和基于模式识别的控制,与后来发展起来的参数识别自适应控制更加相关.此外,尽管Leondes是此文的第一作者,但实际并没有参与其写作,完全是当时年轻的孟德尔自己的研究工作.孟德尔1963 年从纽约Brooklyn 工学院博士毕业后,一直在麦道公司研发航空航天控制技术,是一位十分活跃且杰出的青年学者.1968 年,在为Leondes 主编的系列丛书“控制系统进展:理论与应用(Advances in Control Systems:Theory and Applications)”写了一章关于人工智能在控制中的应用之后,孟德尔引起Leondes 的注意.Leondes 告诉孟德尔,他被邀为纪念维纳的专著写一章,希望孟德尔执笔,但他必须是共同作者,最好是第一作者,结果就是文献[3].然而这完全是孟德尔自己的工作,因为他后来回忆:“Leondes did absolutely nothing!”.
一定意义上,文献[1]是学习控制第一篇也是最后一篇全面深入的综述文章,因为之后学习控制就消融于自适应控制、自组织系统和模式识别决策的不同研究方向之中.令人感叹的是,文献[2]总结的5 种范式:1)基于模式识别器的可训练控制器,2)强化学习控制系统,3)控制中的贝叶斯估计与学习方法,4)随机逼近方法,5)随机自动机模型,以及展望中提出的学习之分层递阶结构与学习控制之模糊逻辑方法,今天又重新出现在主流的机器学习、模式识别和人工智能研究方法之中[16−17].
在总结展望学习控制的过程中,傅京孙一定意识到更多的人工智能在控制中的应用场景,并可能形成新的研究领域.因此长文[1]之后,立刻补充了短文[2],旗帜鲜明地提出智能控制一词,认为人工智能与自动控制的交融,必然导致从学习控制到智能控制的发展.傅京孙把智能控制系统大体分为三类:1)具有人类操作员的系统;2)具有人机交互控制器的系统;3)自主机器人系统,强调离线模式识别和在线参数识别对于复杂情景下智能控制的重要性,希望其短文能够成为“激发在这一领域更多兴趣和研究的催化剂”[2].十多年后,他的愿景获得巨大成功,智能控制终于成为一门生命力强盛且应用广泛的年轻学科.
仔细研读文献[2],可以认为其核心理念是建立以人为模式的控制系统之思想,先是模拟人的控制行为和过程,然后由机器部分取代人的功能,最后完全以机器人替换人的作用.这一设想在当时过于宏伟,缺少具体的理论方法与技术.提出智能控制的概念之后,直到突然去世之前,傅京孙的主要精力和时间都放在模式识别的理论及其应用,特别是语法语义模式分析上,并主导创办了国际模式识别学会(IAPR)、电气和电子工程师学会(IEEE)、模式分析与机器智能汇刊(IEEE T-PAMI),几乎没再直接涉足智能控制的工作.
实际上,从20 世纪90 年代初直到90 年代中期,在智能控制的早期发展和成长壮大阶段中发挥主导性作用的是傅京孙的普渡同事萨里迪斯.萨里迪斯将分层递阶系统的结构框架和运筹学与决策论引入智能控制,提出了历史上深具影响的“组织−协调−执行”三层结构和相应的“智能增加,精度减少”的分层设计原理,提倡以信息论的熵概念及其测度来统一智能控制理论中的不同方法与体系(见图2).当时关于智能控制系统的实际应用案例很少,萨里迪斯大力推动其在交通、机器人、空间探索和计算机集成制造等方向的应用,并在美国自然科学基金(NSF)创设相关资助机构,在IEEE 推动成立机器人与自动化学会(RAS)和智能控制委员会(CIC),在Stephanou、Meystel 和Albus (见图15)等协助下创办系列的IEEE 智能控制研讨会(IEEE ISIC),并在美国宇航局(NASA)建立空间探索智能机器人系统中心(NASA/RPI CIRSSE),这些活动使智能控制的研发在80 年代末90 年代初,形成了一个国际高潮.
图15 智能控制早期的开拓者和组织者Fig.15 Pioneers in intelligent control
在此期间,孟德尔依然活跃在学习控制和智能控制领域,并与傅京孙和萨里迪斯合作,推动相关研究.后来在其中国博士生王立新和伍冬睿等帮助下,在模糊逻辑和控制,特别是二型模糊系统方面取得了一系列成果.
王浩、麦克诺顿(见图16)、尼尔森等人在自动机和形式语言方面的工作,也从理论计算机和人工智能的角度推动智能控制的发展.王浩一直希望用自动机将定理证明的逻辑推理过程形式化,并与伯克斯(见图16)等合作,开展了大量的研究工作,激发了当时学者对利用机器实现智能控制的向往与热情.特别是麦克诺顿和他的学生合作证明了有限状态自动机(Finite state machine,FSM,一种最简单的自动机)与正则语言(Regular language,一种最简单的形式语言)完全等阶后[17](即著名的麦克诺顿引理,今天许多教科书已将有限状态自动机直接作为正则语言的定义,很大程度上掩盖了这段发展历史),使人们对利用机器处理自然语言产生了相当高的期望.由于智能与人类语言的紧密关系,这项工作加强了大家对建立智能控制系统的信心和兴趣.在此背景下,许多人工智能的创始人和早期开拓者,如明斯基和尼尔森等,都开始了利用自动机进行自动智能机(Intelligent automata)和移动机(Mobile automata,主要指移动机器人,如Shakey等)的研究[17].显然,这些工作在智能控制的早期发展中发挥了十分重要的启蒙作用.
图16 形式语言与自动机理论的开拓者Fig.16 Pioneers of automata and formal language
实际上,1990 年之前关于智能控制的工作多数是概念性、示意性研究,解析性和具体算法设计很少,也没有多少研究人员.例如,机器智能与人工智能之间的区别与结合(如图17 所示)就是一个泛泛的“哲学式”问题[47].当时的一个迫切任务就是如何将智能控制的探索转为针对具体场景的“解析型”研究,建立可实现、可检验、有效的智能控制理论和方法体系.从1985 年到2016 年期间,IEEE ISIC研讨会在智能控制的发展史上起到了主要作用(其早期封面见图18).鉴于目前对智能系统的时代需求,希望ISIC 能以IEEE ICIC 形式重新复活.

图17 机器智能与人工智能Fig.17 Machine intelligence vs.artificial intelligence

图18 早期智能控制研讨会论文集封面Fig.18 Proceedings of IEEE ISIC 1988
从1985 年到1989 年,本人的主要工作围绕:1)智能控制的体系结构与过程,2)如何从结构过程到算法设计,3)如何从算法生成到系统实现等三个方面展开,并在航天、外空探索、计算机集成制造等领域进行具体应用.图19 给出本人建议的将基于智能控制的智能机器视为可自动产生高级语言,并可自动编译为可执行的机器指令,然后通过与执行器相连的实时嵌入式操作系统完成控制功能的智能系统.为此,提出Petri 网络翻译器(Petri net transducers,PNT)、PNT 形式语言、协调结构(Coordination structures)、调度器(Dispatchers)、控制总线(Control buses)等概念及其数学模型;同时,引入博弈论和机器学习算法,在执行过程中不断改进策略优化控制,并用于NASA 实验空间站的检验和组装研究[13−15,48](如图20~图22).其中,PNT的引入,将智能控制任务状态的表示复杂性从原来基于有限状态机FSM 的指数级降为多项式级,有效地解决了相应的“组合爆炸”问题.这是后来Petri 网被广泛用于制造自动化的内在原因,麦克诺顿教授在这项工作中给予本人极大的引导和帮助.然而,值得指出的是,有限的Petri 网络一般伴随无限的可达状态树空间,因此,PNT 的复杂性降阶只是将表示复杂性转移至决策复杂性而已,实际上并没有减少复杂性.然而,由于决策复杂性一般都是指数级的,因此这并不是一个问题.

图19 智能机器与计算机Fig.19 Intelligent machine and computers
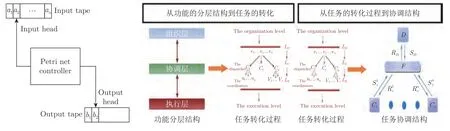
图20 Petri 网络翻译器及其翻译过程Fig.20 Petri net transducers and translation process
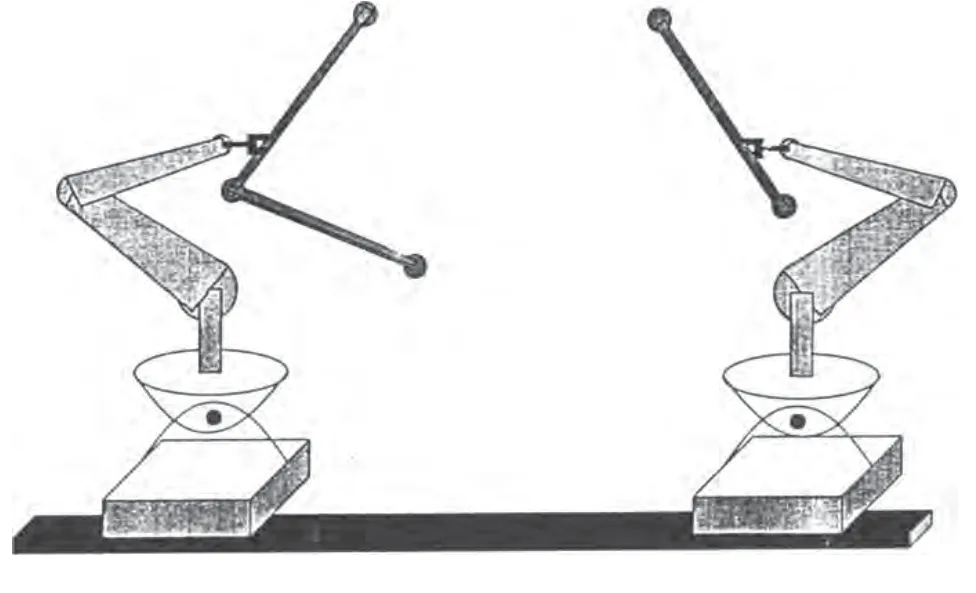
图21 NASA 机器人空间站组装平台原型Fig.21 NASA/RPI CIRSSE robotic assembly platform
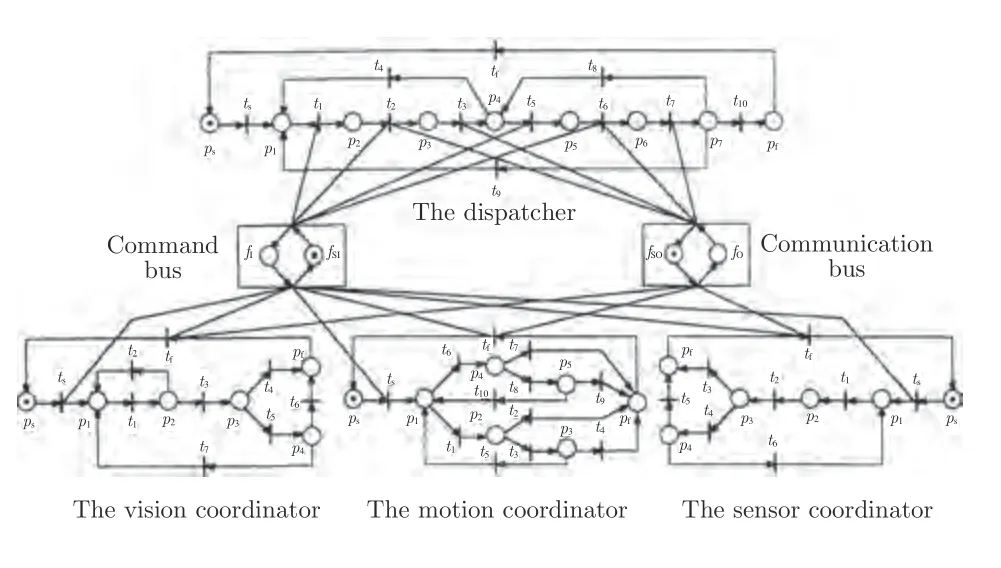
图22 一个智能机器人的协调结构Fig.22 The coordination structure of an intelligent manipulator system
1995 年,在萨里迪斯、Meystel 和Albus 的帮助下,本人创办《智能控制和智能自动化丛书》 以及《国际智能控制与系统》 杂志(International Journal of Intelligent Control and Systems,IJICS),成为该领域的第一份学术丛书和期刊(见图23).后由于与出版社意见不一致,杂志一度停刊,2021 年在中国自动化学会的支持下,IJICS 重新出版.
图23 《智能控制和智能自动化丛书》 与《国际智能控制与系统》Fig.23 ICIA Book Series and IJICS
在中国,清华大学的一些学者在80 年代初就提倡研究智能控制理论与应用,并于1991 年在清华大学举办了第一次全国智能控制专家研讨会.在这次会议上,发起了每年举行一次全国性的智能控制与智能自动化会议的倡议.1993 年,清华大学举办了首届全球华人智能控制与智能自动化大会,本人有幸帮助此会邀请海外相关专家并借此机会第一次回国参观学习.1995 年,中国自动化学会批准成立智能自动化专业委员会,进一步地推动了这一领域的研究与应用.中国智能控制的历史值得系统深入地研究,这应是未来的一项重要工作[49−50].
这就是20 世纪智能控制主流发展史上的萌芽期(1950 年~1970 年)、形成期(1970 年~1980 年)和成长期(1980 年~2000 年)之缩影.然而,从90年代起,以模糊控制为代表的智能控制算法大量涌现,并与神经网络控制、遗传演化控制等计算智能控制方法合流,逐渐成为智能控制研发的主流方向,而关于智能控制系统结构等方面的工作相对减少.进入21 世纪后,智能控制随着数据、算法和计算机软硬件的大力提升而日新月异,已进入了一个崭新的历史发展阶段,特别是近年来深度学习的巨大成功和人工智能的兴起热潮,更为智能控制的深入和普及提供了难得的发展空间和机遇.毫无疑问,智能控制将成为智能时代控制理论和自动化进一步发展的基石和开路先锋.
4 计算智能:认知、行为、机制
在人工智能的前50 年里,主要是两种路线,即以人性行为为主的计算智能方法和以理性推理为主的逻辑智能方法,也就是所谓的“纯净派”与“邋遢派”[44].尽管以目的论、人工神经元网络、控制论为核心的计算智能起步稍早,但在前30 年的发展历程里,以数理逻辑、逻辑编程、Lisp 和Prolog 为代表的逻辑智能主导了人工智能的发展,在哲学上,这与存在(Being)和变化(Becoming)这两个核心理念的形成过程十分一致.
尽管神经元网络是达特茅斯研讨会建议发展的人工智能6 个方向之一,但由于对1957 年罗森布拉特(见图24)的神经元感知机初始成功[51−52]的过度宣传,加上明斯基和Papert 于1969 年出版的《感知机》 对其的分析,用一个简单的XOR 逻辑运算就证明其功能十分有限,并放大其结论、全面否定感知机;再加上1971 年罗森布拉特意外的死亡事故所引发的神秘感和扩大的影响力,很快使人工神经元网络的研究陷入几乎无人问津的十年黑暗期.实际上,此前许多的研究成果,如尼尔森的学习机器方法[53]和Widrow 的基于单程Adaline 的多层网Madeline[54],早已确定了多层神经元网络具有通用的逼近和学习功能.这一事件说明,媒体的传播和影响力使用不当,有时会对正常科研产生十分负面的冲击.2004 年IEEE 计算机智能学会设立IEEE Frank Rosenblott 奖,以纪念他在神经元网络研究上的开拓贡献.
图24 计算智能和认知科学的开拓者Fig.24 Pioneers in computational intelligence and cognitive science
对人工智能更大的冲击随之而来:1973 年Lighthill 报告问世,认为人工智能经过25 年的发展(英国人认为人工智能从1947 年图灵的技术报告开始)并没有产生任何许诺的重要贡献,并对其许多核心技术前景持悲观态度,成为英国政府停止支持许多大学和机构的人工智能研究之依据.为此,麦卡锡专赴伦敦与Lighthill (见图12)公开辩论,称人工智能就是基于图灵机的自动机,但依然无法挽回局势.由此,从英国到美国,人工智能的研究经费被大大缩减,进入了长达十年的艰难时期,这就是其最长最严峻的一个“严冬”.严冬之中,计算智能的另外两个核心方法,扎德的模糊逻辑和Holland 与Fogel (见图25)的遗传算法得到了成长与发展的机会.
图25 模糊逻辑与遗传算法的开拓者Fig.25 Pioneers in fuzzy logic and genetic algorithms
危机之中有转机,Lighthill 在其报告中认为人工智能的一些研究在一些领域中可能有用,其高中的朋友Longuet-Higgins 将其归结为4 点,并合为一体,称为“认知科学”.随即,Longuet-Higgins 同其博士生辛顿(Geoffery Hinton)和其他从事心理、神经、生物学研究的同事开始相关工作.实际上,在参加了1956 年夏季的达特茅斯人工智能会议之后,维纳的学生Selfridge 立即在MIT 组织举办了第一次较为正式的认知科学研讨会.人工智能与认知科学本应从一开始就相互依存,共同发展.1986 年,认知科学蔚然成势,著名的PDP 三卷本出版后,辛顿利用BP 算法的多层神经网络重新获得关注,相关研究走上正轨.20 年后,辛顿的工作演化为深度神经网络和深度学习,以此为基础的AlphaGo 获得巨大成功,终于使人工智能技术得到社会的广泛认可.AlphaGo 之后,时代的IT 不再代表信息技术,那已是旧IT 了,而是代表智能技术(Intelligent technology),这就是新IT.
从1990 年到2000 年期间,本人在计算智能和智能控制的结合上主要围绕6 个方面展开[15,55–77]:1)提出“当地简单、远程复杂(Local simple,remote complex,LSRC)”的网络化系统的设计理念,以及远程现场可编程设备的概念与原型设计;2)实时嵌入式系统的组织与设计,以及特定专用操作系统(Application specific operating systems,ASOS)和可编程片上系统(Systems on programable chips,SoPC);3) 基于代理的控制系统(Agentbased control,ABC)和相应的基于代理分布式集中控制系统(Agent-based distributed control systems,aDCS)及网络控制器,主要是受明斯基代理(Agent,或称智能体)理念的启发;4)自适应动态规划(Adaptive dynamic programming,ADP),这是我在1984 年利用变分法处理非线性滤波和控制近似最优解的想法,后用于随机非线性动态系统的次优解设计,最终在许多人的共同努力下发展成为ADP,复杂系统管理与控制国家重点实验室的刘德荣和魏庆来目前已成为引领ADP 研究的权威[78];5)如何将基于模糊逻辑的决策规则与基于神经网络的学习方法结合,首先是让人的经验和直觉推理数字化解析化,其次是利用语言知识训练神经网并在网中嵌入知识结构,使其可解释可理解,为此推出九层模糊神经网络(Neuro-fuzzy networks)结构(见图26),为LSRC 系统提供远程学习和边缘计算的途径;6) 语言动力学系统(Linguistic dynamic systems,LDS),试图像数模/模数(Digital to analog,analog to digital,DA/AD)转换一样,实现词数/数词(Word to number,number to word,WN/NW)转换(见图27),成为词计算最早的工作之一.实际上,1990 年开始的第一项新研究是大脑的数学建模,可惜当时条件不足,不久就转向模糊神经网络的研究.十分有幸的是,我们得到了在金融、健康、矿山、交通、无人驾驶、工业制造、过程控制、机器人与自动化、军事安全等领域应用这些技术的机会,并完成了多部相关方向的学术专著,如无人矿车与机器人挖掘、月球/火星采矿智能车的传感与控制、基于代理的网络化计算智能等(见图28).
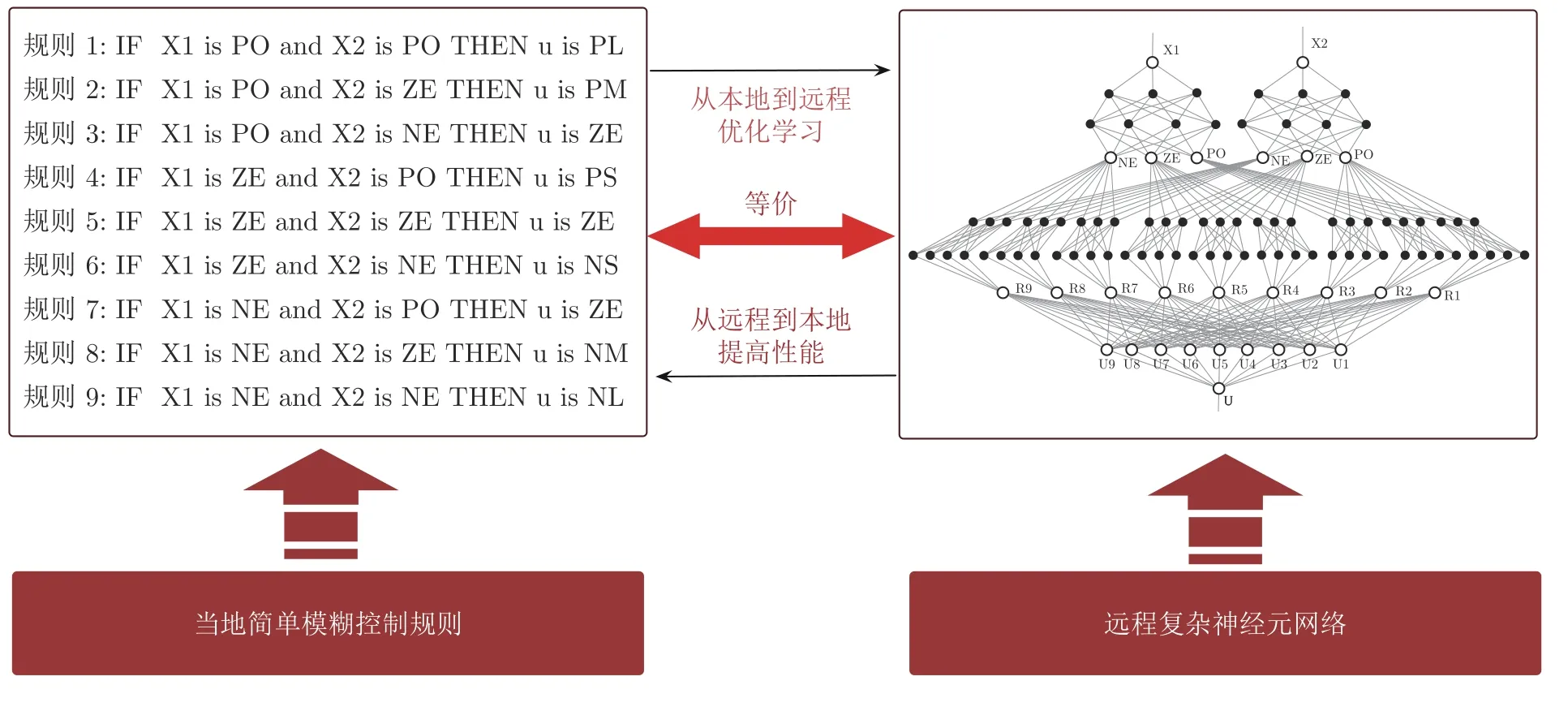
图26 实现LSRC 原理的模糊神经网络Fig.26 Neuro-fuzyy network for LSRC
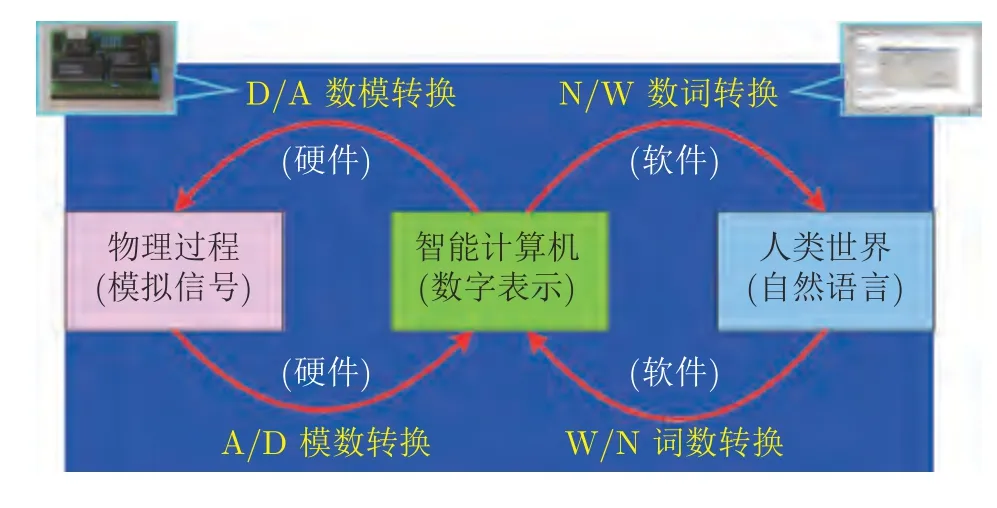
图27 广义语言动力学系统Fig.27 Generalized linguistic dynamic systems
图28 代理控制、无人矿山和智能车专著Fig.28 Agent-based Control、Autonomous Mining,and Intelligent Vehicles
5 平行控制:ACP 与CPSS
上世纪80 年代,本人的主要研究工作是协助萨里迪斯构造基于智能控制的智能机器解析理论与方法.然而,我们之间的学术观点有时非常不一,特别是在关于熵的概念和方法如何在智能控制中有效应用的问题上争论异常激烈[79–82].但是,无论从学术上还是生活上萨里迪斯都给了我极大的关怀与支持.90 年代独立工作后,在萨里迪斯的大力支持下,我决心开始自己的学术道路,重新选择应用场景和具体的方法及算法研究,这就是矿山、交通、无人车、健康、经济、复杂系统等领域,以及相应的LSRC、ASOS、SoPC、DCS、Neuro-fuzzy、LDS、影子系统、范畴和Monad 等工作[57−58,63,65−66,83–86].
进入21 世纪,本人的核心研究就是针对复杂系统的平行理念及其相应的概念、理论、方法和算法.从智能交通系统开始,因为人、路、车构成一个完美的工程复杂性与社会复杂性参半交织的开放复杂系统,然后是赛博网络空间中的舆情问题,并很快转向安全与国防[87–93].但是,平行用于控制、特别是复杂系统的控制,是我内心念念不忘的课题,这就是我选择《控制与决策》 发表自己第一篇平行系统与平行智能文章的原因[94].
图29 给出平行思想的基本构成和方法基础,即CPSS (Cyber-physical-social systems,赛博物理社会系统)和ACP 方法(Artificial societies,computational experiments,parallel execution,平行方法).相比图2,智能控制从“三环三框”到“五环五框”,目的就是针对复杂性问题,将模型从系统分析器还原为数据生成器,使复杂系统可计算、可实验、可验证,使复杂控制量化、解析、可视.图30 给出平行控制在控制理论中的位置和相应的基本框架.
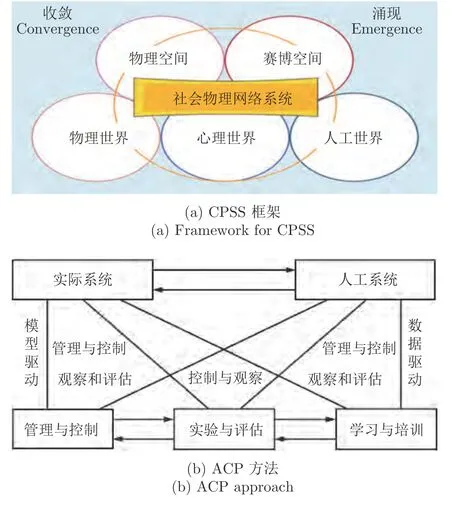
图29 平行控制的CPSS 和ACP 方法Fig.29 CPSS and ACP for parallel control

图30 系统复杂性和平行控制器Fig.30 System complexity and parallel controllers
最初,平行控制是针对复杂系统,特别是涉及人与社会的复杂系统,如图31 所示.此时,开源信息和社会计算是平行控制的主要特色,是传统控制没有关注的内容,同社会学、心理学、管理学,特别是社会治理密切相关.然而,平行控制在传统控制中也有重要作用,如图32 所示,简单而言就是对控制求导,将被控系统与主控系统在数学上对偶,使之完全“平等”,从而为实施智能控制提供哲学和数学上的支撑.加上近来兴起的云计算与边缘计算,相信平行控制在传统控制方面一定有意义重大的广泛应用.

图31 平行控制和平行管理Fig.31 Parallel control and parallel management

图32 平行控制的基本方程Fig.32 Basic equations for parallel control
实际上,可从数学上证明,当实际系统与人工系统相似时,图30 所示的一般的平行控制系统等价于图32 所示的简单平行控制,其方程如下.
受控系统的状态方程:

主控系统的控制方程:

传统上,对控制向量u求导既无物理意义,又无分析上的明显作用.因此,除了在传统的传递函数分析时作为过渡使用外,并不进一步讨论和研究.而且,求导意味着放大噪音,提高对硬件的要求,所以更是无人问津.
然而,近期的理论研究表明,平行控制具有如下意义[95–99]:
1) 使控制系统与被控系统在形式上对称,它们不再一个是代数方程、一个是微分方程,而是两个对等的微分方程,从而使二者从形式到内容在数学上完全一致.这是实现拟人控制和傅京孙以机器人实现智能控制设想的基础.
2) 控制器不再是根据状态即时地决定控制量,而是根据状态决定控制的变化量,进而决定控制量本身.这为控制回溯历史、预测未来和引导未来提供了数学基础,扩展了决定控制的信息空间.同时,为以新的方式引入控制与被控角色的博弈对抗打下了基础,机器学习、人工智能等方法也更加有效地融入控制理论.
3) 经典控制的方程可被视为平行控制方程的特殊情况.实际上,经典控制可被视为控制的变化率和状态的变化率成比例的一种特殊的平行控制.经典控制的各种问题及相应的研究结果,都可以在平行控制的新视角下重新进行分析.
4) 平行控制可被重新写成一个自洽的微分方程,但是系统函数未知待求,否则许多关于自洽方程的分析结果可被直接利用.对于实验来说,这也为求解平行控制问题,特别是非线性平行控制问题提供了新的途径,是一个十分值得关注的方向.此外,这也为平行控制与基于核函数的神经网络方法建立了一种天然联系,人们可以利用最佳格点集和最小二乘方法,直接用神经网络求解非线性平行控制方程[100−101].
5) 平行控制为“边缘简单,云端复杂”的云控制提供了一条新的途径.简言之,控制的变化率可以在云端实施,控制的输入量可以在边缘设备上实现,而且边缘和云端的被控模型可以不完全一致,边缘模型一般应为云端模型的简洁式或简化版,而且云端的控制向量可以作为边缘端的控制向量的指令或设定目标(Set points).这在一定程度上解除了对控制向量之时间导数的物理意义与负面作用的顾虑,因为云计算可以是物理模型之外的计算,其本身并非必须具有物理规则的基础.
综上,平行控制是智能控制向控制智能转换的有效途径,值得深入研究.
6 控制智能:从平行智能到知识自动化
马克思曾说:“哲学家们只是用不同的方式解释世界,而问题在于改变世界”[102].同理,人类要可持续发展,人工智能必须发展成为控制智能和管理智能,成为人类可持续发展的利器与途径.借助工业自动化,人类社会走到今天,但人类的明天必须依靠知识自动化,这就是控制智能的历史使命.
如图33 所示,控制智能必须融复杂性控制与自动化、跨学科控制与自动化、体系化控制与自动化为一体,将控制小数据(Small data)扩展成为控制大数据(Big data),再深化成为控制智数据(Smart data),使What IF 和IF Then 的思维习惯量化智化,从多学科到学科交叉,再到跨学科,最后成为针对具体问题的“超”学科,如图34 所示.
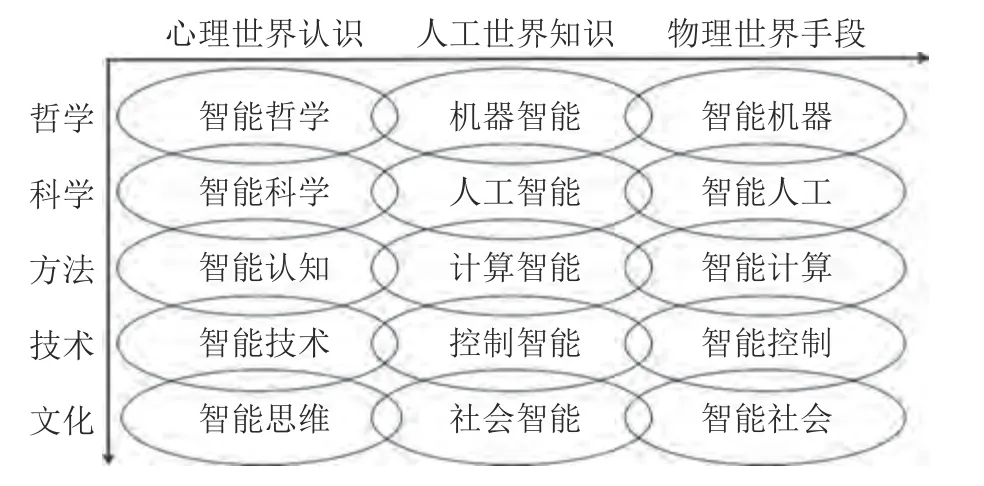
图33 控制智能与学科交叉和融合Fig.33 Control intelligence and interdisciplinarity

图34 控制智能:小数据、大数据、智数据Fig.34 What IF vs.IF Then in control intelligence
平行智能将在这一进程中发挥重要作用,加速智能控制向控制智能的发展,推动智能自动化的切实落地与普及深入.平行的理念源自非欧空间平行线相交这一数学事实对我们的冲击,特别是这一突破在创立相对论和量子力学理论过程中的重大贡献,让我们有了现代科技和今日的产业繁荣.然而,产生平行方法的种子,却是源于1982 年在浙江大学力学系研究设计断裂力学的金属平板断裂拉伸实验.当时,这种实验费时费钱,一个研究生无法承担.无奈之下,我想起蒙特卡洛方法:既然此法为核实验的计算方法而生,为何不可为我的断裂实验而用? 由此,有了关于利用计算机进行裂缝计算实验的建议报告和相关的研究[103−104],并理所当然地被否定.
然而,我依然相信这种方法的价值,并天真地认为这可以使《1984》 中影子般的“Big Brother”从负面角色转为有效企业和社会管理的正面角色——数字工作者(上班无时无刻不在,督促各项工作的落定),可惜当时的技术无法支持这种想法.几年后,我参加了NASA 国际空间站自动组装的研发以及月球火星无人工厂的设计与控制,再次面临既无数据又无“真”可仿的“仿真”问题,这就是1994年提出“影子系统”的背景与动因[83],是文献[103]思想的直接延长,与今天的“数字孪生”不谋而合,思想完全一致,可惜后来只是应用于90 年代末的大电网系统的分析[105].这些想法的进一步延伸,就是21 世纪初正式提出的平行智能和平行系统[94,105].
平行的理念其实很简单,就是用智能科技的方法,让实的变虚,让虚的变实,然后充分利用知识自动化让虚实对立统一,实现虚实空间之间的实时反馈,形成虚实空间之间的控制闭环.平行理论由人工体系、计算实验、平行执行三大部分构成(即ACP方法),每一大部分依据系统复杂性又分为三个层次:A)数字孪生、软件孪生、虚拟孪生;C) Simulation,Emulation,Imitation;P)决策生成、决策推荐、决策支持.因此,共计有27 种不同的基本形态.按照通俗的话来讲,平行系统的简单形态就是影子系统或数字孪生,复杂形态就是镜像世界或元宇宙[106−107].2004 年,平行智能理论文章公开发表之后,立即引起国防与安全相关人员的关注,并于2005年开始展开相关工程的研究.
然而,我们必须清醒地认识到:智能时代单凭智能技术远远不够,新时代要求与之相适应的新思维和新哲学,并创造相应的社会新范式.但问题是智能时代的新哲学是什么? 新在哪里?
本人认为,必须把西方哲学的两个核心理念Being 和Becoming 扩展,加入第三个“B”—Believing.这一想法源于波普尔的三个世界现实观:从物理世界、人工世界、心理世界以及对应三个世界的三种知识,自然延伸到相应的三种哲学,从而引入新的平行哲学,如图35 所示.由此,进入图36揭示之“在、信、思”“3B”哲学和相应的循环因果:我在故我信,我信故我思,我思故我在.

图35 平行哲学与三个世界Fig.35 Parallel philosophy and Popper's three worlds

图36 平行哲学与循环因果Fig.36 Parallel philosophy and circular causality
数学上,就是在实际系统中建立牛顿方程,在虚拟系统中创立默顿方程,形成平行对偶方程,使之相互纠缠、平行相交.
其中,S和T,N和M,R和V分别为实与虚的状态函数、状态变量和输入变量.在云边计算框架下,一般情况下实在边缘,虚在云端.平行控制,是其特例.由此,以解析的方式走向控制智能,迈向知识自动化.
7 展望
七十多年前,类似“在、信、思”的循环因果论思想催生了维纳的控制论和基于人工神经元网络的计算智能原型.今天,希望这一认识能在交织的三个平行世界里得到更加深入的发展,从而有序有效地推动智能科学与技术的发展.令人高兴的是,在人工智能正式启动之前,数学家就开始为我们准备了循环因果智能变革的数学工具,把哲学的理念变成数学概念,形成范畴的数学理论,把哲学单子“Monad”变成数学“智子”Monad,并成为面向对象的程序语言的设计基础.而且,这一切也是源自推动智能研究的数学家希尔伯特.相当程度上,代数几何开启了描述知识的时代,微分积分开启了预测知识的时代,而范畴表示则开启了引导知识的时代,合起来形成了构建智能时代的完整数学体系.
我们相信,以“新IT”智能技术为代表的智能科技将开创开发人工世界的新纪元.平行哲学将人们的常规思维对象从系统和平台引向生态体系,将三个世界的自然生态、社会生态、知识生态融为一体,走向虚实互动的平行生态和联邦生态[108–111],把人类发展推向“6S”新境地:物理世界安全Safety,网络世界安全Security,整体发展可持续Sustainability,保障隐私和个性化个体发展的Sensitivity,全面服务的Service,智慧社会的Smartness.
“忆往昔峥嵘岁月稠,看今朝旖旎风光秀”.五十年来,智能控制已形成众多成熟、成体系的算法与平台,并在工业、农业、交通和航空航天等许多领域得到了广泛而深入的应用.传统和现代控制在工业自动化过程中发挥了极其重要的作用,使我们的社会发展到目前的工业化水平.相信在从工业化向智能化进军的征程中,特别是在完成碳中和的历史任务中,智能控制会发挥更加重要和关键的作用,成为社会智能化的新技术——智能技术的核心与支撑.
致谢
本文从个人的经历对智能控制进行简要的回顾与展望.作者有幸从化工和力学背景进入机器人、计算机、运筹学、人工智能和智能控制等领域,研究生期间得到导师G.N.Saridis 和R.F.McNaughton 教授的无私指导,获得计算机与系统工程博士学位,从事相关交叉研究与应用四十余年.在此,对自己的同事和学生深表感谢,特别是自1990 年随我起步研究柔性机器人、脑模型与计算、模糊神经元网络最初的三位博士生关国光、Jeffrey Russell 和H.M.Kim,以及后来陆续在美国和中国毕业的100 多名硕士生和100 多名博士生,他们在我的学术生涯中给予自己极大的精神和智力上的支持.同时,感谢浙江大学,包兆龙包玉刚基金会,NASA,NSF,DOE,NIST,New York State,Arizona State,AT&T,IBM,ABB,BHP,Caterpillar,中国科学院,国家自然科学基金委,中国科协,科技部,工信部,科龙,徐工集团,慧拓,迪巨等中美机构与组织对自己研究的支持.特别感谢办公室工作人员宋平、李艳芬,博士生丁文文、郑文博、张文文为本文整理资料和录入手稿.
追往思远,我们不可忘记开拓智能控制的先驱,谨以此文纪念傅京孙教授(1930 年~1985 年)和G.N.Saridis 教授(1931 年~2006 年)九十周年诞辰与将临的R.F.McNaughton 教授(1924 年~2014 年)百年诞辰.