车辆安全跟驰模式预测的形式化建模方法
2021-12-01刘秉政王鹏伟
刘秉政 高 松 曹 凯 王鹏伟 徐 艺
在多车道动态交通环境中,除自由流交通状态以外,车辆的行为模式选择与变化均会受到同车道前后相邻车辆以及相邻车道同向或异向邻近行驶车辆的直接或间接影响制约,如自车的加减速控制直接受制于同车道相邻前后车辆,自车的变道或超车行为还将受到目标或相邻车道中邻近车辆的行为约束,因此对周边车辆行为动态的准确把握是自车安全行驶的前提.而跟驰行为是车辆在道路环境中最基本的行为模式之一,对其行为模式的准确描述有利于对周边车辆此类行为动态的正确预估.尤其在自车做出超车或变道选择时,对相邻车道上周边车辆的安全跟驰模式预测显得十分必要,而智能车辆在多个方位载有传感器,可获得较为完整的周边车辆运动状态信息,在车联网环境中这些信息将更加详实可用,这就使得对周边车辆在安全跟驰模式下未来行为动态的精确预测成为可能.
为了表现在安全行驶过程中跟驰车辆与关联车辆之间的动态制约影响,传统的车辆跟驰行为建模方法一般通过在跟驰模型中加入某种速度控制准则来表现特定的车辆跟驰行为动态[1],如通用汽车(General motors,GM)[2]、优化速度(Optimal velocity,OV)[3]、广义力(Generalized force,GF)[4]和全速度差(Full velocity difference,FVD)[5]等经典模型.近期的一些研究则在跟驰建模中加入了更多的影响因素,如通过使用驾驶员的风险感知,加速和减速的灵敏度系数以及响应时间的参数来直接描述跟车过程中的驾驶行为[6],考虑到网联车辆的发展趋势,构建一种异构交通中通用的常规和联网车辆的跟车模型[7].这些跟驰模型提出与构建的宗旨多是通过统一车辆跟驰控制行为,减少车辆行为波动或降低跟踪误差[8−9],从而稳定道路交通流、缓解交通拥堵及降低尾气排放[10].然而,为正确把握必要的周边车辆的跟驰行为动态,需要对车辆所有可能的安全跟驰行为进行综合统计预估,即预测出安全跟驰模式下对象车辆的系统状态在未来时空范围内的分布极限.显然,上述模型只能表现车辆系统在某种控制决策下的单一行为动态,既无法在有限次计算内遍历车辆所有可能的系统输入动态和系统行为输出变化,也无法对包含随机扰动的所有不确定系统状态信息进行表征,因而当自车无法获知周边车辆的准确状态信息与跟驰控制决策时,现有跟驰行为建模方法无法在理论上保证对周边车辆安全跟驰预测分析的完备性和可信性,不能用以预测周边车辆不确定的跟驰行为.
为此,本文采用基于严格数学定义的形式建模方法[11]来建模预测不确定状态信息与未知控制策略下的周边车辆跟随行为动态变化,即通过对跟驰车辆踪迹分布的极限可达性计算,实现对车辆跟驰模式的完整行为动态表述和解析.有别于传统车辆行为状态轨迹的表述,车辆的运动踪迹分布是在各种不确定扰动下对车辆行为状态轨迹动态分布的表述,是从车辆初始状态集合到规划目标位置集合所有状态轨迹不确定性的一种把握,其关键是车辆运动状态的可达集有效建模与计算.现有可达集的建模手段主要是将系统状态域过近似(Over-approximation)抽象为诸如凸多面体[12]、分段仿射系统[13]或椭圆体[14]等空间形态,在此基础上从系统当前状态域的形态起始,通过迭代后继形态的变化来实现对状态可达集的近似计算.由于此类过近似抽象计算复杂度高,计算成本大,从而无法对高维度复杂系统进行分析,因此相关方法在一般非线性混杂自动机上表现并不如人意.但可达集在线性数值域上的计算方法远成熟于非线性,复杂度也能得到较好的控制,因此,在基于凸多面体表达的建模条件下,现有可达集多作为线性混合自动机基本状态域的数值表现形式[15−16],在车辆状态可达性分析领域最具代表性的为Althoff 等的研究[17−20].Althoff 等在早期研究中提出利用随机可达集表征车辆行为状态[17],但此研究针对的是既知控制信息下的车辆行为分析.近期的研究则通过对交互影响的车辆的状态可达集进行危险部分切割,以探索车辆的安全可达区域[18].其他研究则更加侧重于降低安全决策问题中的可达集计算量,如搜寻一个避障过程中的最小计算可达空间[19],或从最晚安全避障控制时刻点起始进行可达集计算[20].以上研究主要倾向于自车的安全决策问题,而非对周边车辆的不确定行为预测分析.
本文以Althoff 等研究[17]为理论参考,利用随机可达集对跟驰模式下车辆混杂系统的运动特性进行描述,并将其近似抽象为离线马尔科夫链以反映车辆自身运动状态的不确定变化规律;为了验证安全跟驰模式下车辆控制输入的选择规律,提出通过构建跟驰模式下相关车辆在状态及控制输入之间的离线安全关联矩阵,以反映跟驰模式下关联车辆之间的行为影响机制;综合离线信息与当前相关车辆状态信息,实现对周边车辆安全跟驰行为的在线估计.本文不仅验证该建模方法对周边车辆安全跟驰模式预测的完备性,还将初步探讨方法对跟驰控制策 略建模分析与安全验证的有效性.
1 系统建模框架描述
在复杂的道路交通环境中,跟驰车辆自身的运动状态不仅存在着复杂的不确定性,而且还直接受前方车辆位置与速度的不确定性影响,因此跟驰车辆的安全策略具有很强的随机性特征.为此,提出采用随机可达集的形式化建模思想,完整表达与解析在各种不确定条件下周边车辆所有可能的安全跟驰决策行为.为了提高车辆安全跟驰模式在线验证的效率,构建离线计算与在线验证计算框架,系统行为的模型构成及逻辑关系如图1 所示,图中虚线链接为数值更新及其方向.
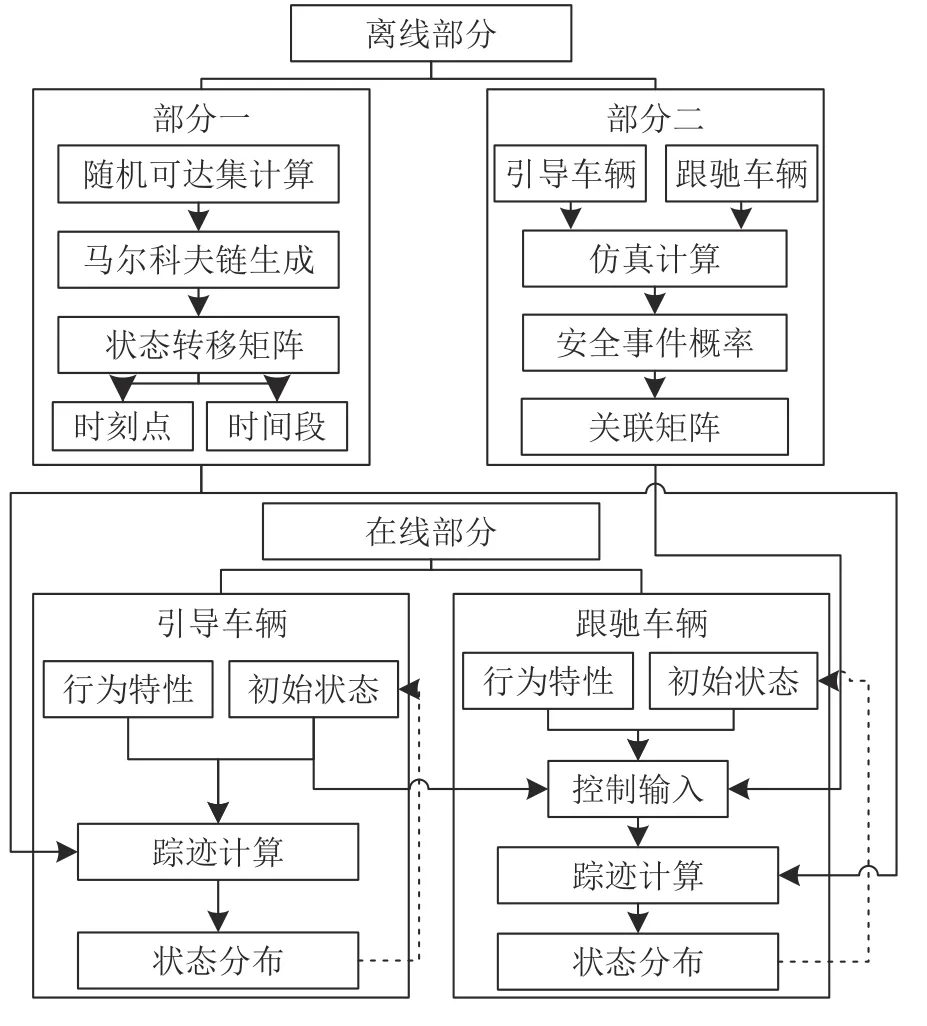
图1 建模框架Fig.1 Method framework
具体地说,模型框架的离线计算目的之一是为在线预测提供跟驰车辆运动状态估计所需的动态变化规律信息,主要通过对车辆运动状态的随机可达集建模,表现跟驰车辆个体行为因各种扰动而可能产生的不确定性.本研究以状态可达集的离散变化近似表达车辆的连续运动,为此,对车辆运动状态的初始随机过程可达集采用马尔科夫链逼近的表现方式[17],而这一逼近过程分两步进行:1) 将初始连续的系统状态空间分割为若干栅格,以此离散化系统状态空间;2) 计算系统状态由一列栅格转移到另一列栅格的概率,并将结果储存到马尔科夫转移矩阵中.以此近似抽象车辆运动状态变化的转移规律,提取车辆运动状态与状态转移矩阵,以便降低在线运算难度,减少在线估计时间.
目的之二是为对周边车辆控制输入的在线预测提供安全跟驰模式下车辆之间状态关联矩阵,从而为预估在引导车辆行为制约下跟驰车辆可能的安全决策提供模块化操作的选择依据和选择概率.为此,通过对跟驰模式中关联车辆之间行为安全的离线仿真验证,获得车辆状态及控制输入之间的安全关联矩阵.
从本质上看,离线计算部分是对传统车辆跟驰建模预测方法的一种改进,体现的是在对引导车辆和跟驰车辆行为的不确定感知约束下,建立引导车辆与跟驰车辆之间所有可能的行为状态及控制输入组合的安全行为关系,由此在期望安全跟驰模式下构建一个引导车辆与跟驰车辆在预估信息范围内的关系矩阵.需要注意的是,在车辆跟驰过程中,传统车辆跟驰建模方法是基于前后相邻车辆的确定行为状态而建立的行为关系,而本文提出的建模方法是针对相邻车辆的不确定控制决策而建立的行为关系,这种关系更能完整反映周边车辆的所有可行跟驰行为.因为车辆是一个具有随机离散控制与实时连续行为模式混杂叠加特性的复杂实时系统,加之各种扰动的作用,使得前车运动状态的不确定性是随机存在的,而跟驰车辆运动状态的不确定性尽管与前车运动状态有关联,但在无法确认具体跟驰控制策略的情况下,需要全面分析预估跟驰车辆随机的 控制选择.
2 系统建模过程
为表达周边车辆的不确定行为状态,采用随机可达集近似表征的方法建立车辆不确定状态下的行为动态模型,且通过离线生成马尔科夫链与在线计算相结合的方式,提高对车辆随机可达集的运算效率.
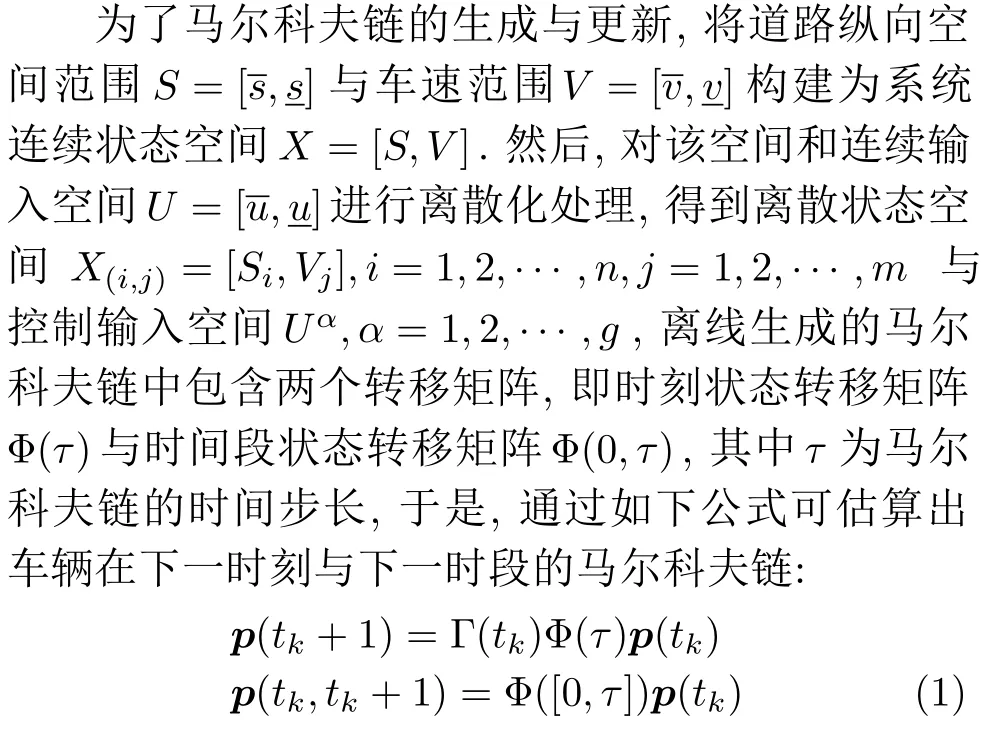
其中,Γ(tk) 为时变控制输入转移矩阵,用以模拟车辆控制输入的变化律.
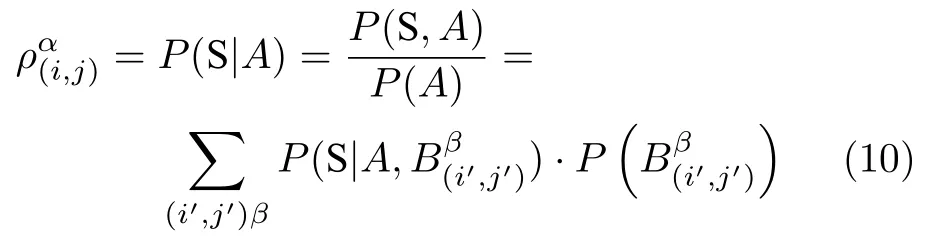
若给定既定状态 (i,j) 下选择控制输入α条件概率为=P(y=α|z=(i,j)) (这一概率值由离线验证所得),且为车辆状态为(i,j)的总概率,显然,车辆状态为 (i,j)且控制输出为α的联合概率为
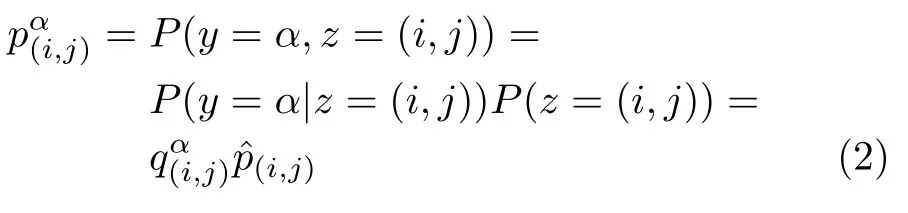
因此,当离线仿真确认tk时刻车辆状态为X=(i,j)时,若车辆控制输入由β区段到α区段的转移概率可得那么在线应用即可预测出tk时刻车辆状态为 (i,j)且选择控制输入转移到α区段的概率为:

norm 算式说明:norm (A) 将A矩阵的列和归一化,效果如下:

其中,参数γ取值越大,表示车辆控制输入调整越频繁,取值越小则车辆控制输入很少调整.
2) 当车辆速度受到交通环境制约从而被动地采取变速措施时,车辆对控制输入离散区段的选择就存在优先顺序,此处用优先级变量λ标记优先顺序,此时的控制输入转移概率可表示为:

因此,在对周边车辆跟驰行为分析建模时,自由流交通状态下只考虑车辆自身行为特性即可,除此之外的交通状态下还需考虑车辆安全跟驰行为约束下的控制输入选择.就人类普遍的驾驶习惯而言,车辆控制输入优先选择在一个固有区段内(习惯区段),只有极端驾驶状态则选择在固有区段外.将控制输入优先选择区段α的概率记为µα,假设引导车辆处在自由流交通状态中,那么跟驰车辆的控制输入选择概率
为了预测跟驰车辆行为受引导车辆速度与位置的制约下控制输入的选择概率,通过离线仿真与安全验证,构建安全跟驰模式下相关车辆的状态及控制输入之间的关联矩阵,并结合车辆的当前状态信息,在线计算出跟驰车辆对可行控制输入区段选择的优先级(以概率大小表示),其过程可见上图1 中建模框架所示,具体计算如下:
1) 离线仿真计算与安全验证.目的是验证引导车辆与跟驰车辆之间的安全性,从而构建跟驰模式下车辆安全行驶的先验知识库.如图2 所示,仿真验证过程为:a)为了分析跟驰过程中跟驰车辆控制操作的安全性,分别为引导车辆与跟驰车辆分配状态空间X(i′,j′),X(i,j),与输入空间Uβ,Uα,在时间间隔 [0,σ·τ] ,σ∈N+内 (τ为计算步长),分别对引导车辆与跟驰车辆在初始状态xL(0)=center(X(i′,j′)),xF(0)=center(X(i,j))以及控制输入uL(0)=center(Uβ),uF(0)=center(Uα) ((center() 为返回集合中心的运算,L(leading)为引导车辆标志,F(following)为跟驰车辆标志)的条件下进行仿真计算,并确定两车在该时间间隔内是否发生碰撞;b)为进一步确认在极端紧急情形下跟驰车辆最终行为的安全性,在t=σ·τ时刻,引导车辆以最大控制输入开始紧急刹车 (uL(0)=−1),同时跟驰车辆也以最大控制输入紧急刹车 (uF(0)=−1),直至跟驰车辆完全停止时刻t=ts为止,检测两车在时间间隔 [σ·τ,ts] 内是否发生碰撞.
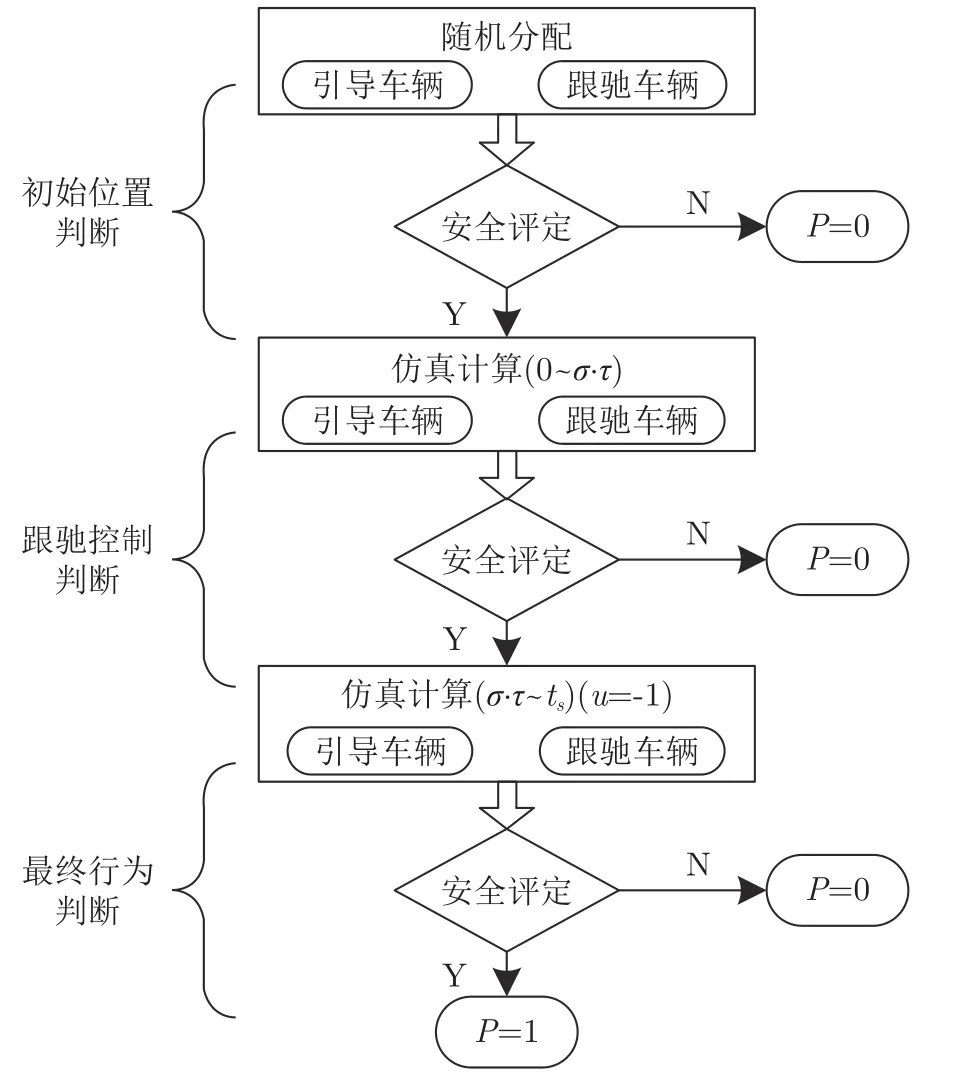
图2 仿真流程Fig.2 Simulation flowchart
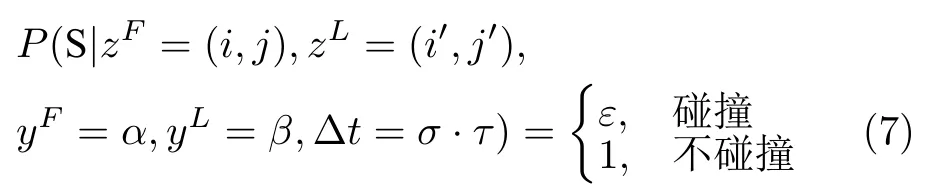
统计相关车辆在不同状态及控制输入条件下的安全行驶事件概率P.

其中,S 表示安全行驶事件,若跟驰车辆的速度控制未满足运动模式中的约束条件,不能保证跟驰车辆安全行驶,则事件为假,事件概率为0;否则,事件为真,该事件概率应为1.
然而,由于交通环境的复杂多变,再安全的控制策略也会偶发不安全事件,因此为了更趋近于实际情况,将所有仿真碰撞结果标记为极小概率事件,即在安全行驶事件中偶发的碰撞概率为ε,因此在对车辆行为的预测中,将上式改写为:
其中,∆t为一离散随机变量,其值表示恒定速度控制所持续的时间范围,该变量取值较大时,表示车辆处于平缓行驶的速度控制选择;取值较小时,反映车辆处于快速调整的速度控制选择.在控制输入的离散区段不变的条件下,假设该离散区段内控制输入持续时间概率为P(∆t=σ·τ),则式(7)可变换为:

这里,概率P(∆t=σ·τ) 不必在线观测,可依据驾驶员的平均分布情况设定其数值.所得条件概率P(S|D) 将按照当前状态与控制输入标记储存在关联矩阵的元素中.
2) 在线计算.因为离线仿真中为相关车辆独立地随机分配了其状态与控制输入,因而若定义关联事件A=(zF=(i,j),yF=α) ,B=(zL=(i′,j′),yL=β),则跟驰车辆此时的安全行驶概率为:
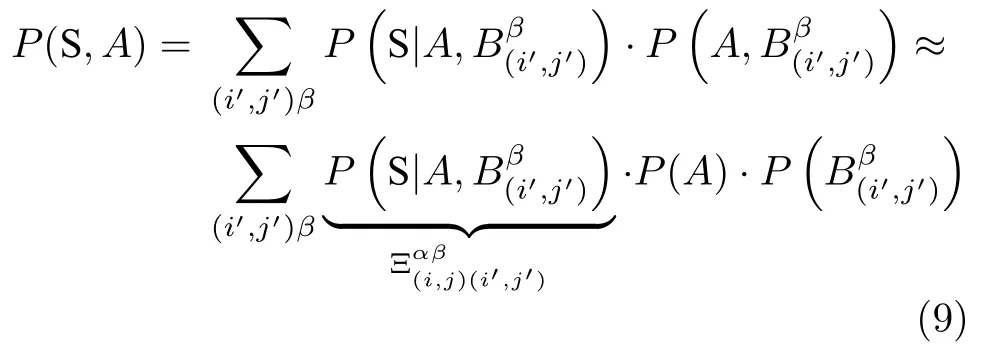
由此,可依据引导车辆当前状态与跟驰车辆当前状态和控制输入,确定跟驰车辆为保证安全行驶而优先选择控制输入区段α的条件概率为:
最终,以车辆控制输入优先选择的固有区段概率µα为基础,条件概率为上限,求解跟驰车辆优先选择控制输入区段α的概率为:

在线计算所得状态分布概率并非实际情形的过近似数值,为此可以将极小概率值省略,将原转移矩阵及概率向量转化为稀疏矩阵及向量,可极大减少计算时间.本文将小于某一概率阙值的元素替换为0,这一数值与上文的状态空间与控制输入的离散划分相关,其值为参数ϖ的值可任选.
3 仿真验证
本文通过以下2 个传统跟驰情形验证例(例1、2),验证本文提出的方法在理论上的完备性和应用的普适性.同时通过对极小概率事件(例3)与设定固定车头间距(例4)的验证例,论证该建模方法对跟驰控制策略安全验证的适用性和有效性.
为了更加详尽地分析车辆不确定行为的踪迹概率分布,本文所用车辆运动模型将车辆行为限定在指定的参考轨道上,即对车辆纵向(沿轨道方向)与横向行为独立建模.纵向运动用简化运动学模型进行描述,运动轨迹由踪迹分布概率f(s) 表示,横向轨道偏离则用分段概率分布函数f(δ) 近似表达,其中δ表示车辆轨迹的横向偏离.这样道路环境中车辆未来的踪迹分布概率可表示为两个方向的联合概率分布f(s,δ)=f(s)·f(δ),极大地提高了概率分析精度.
此外,基于踪迹分布可视化的目的,建模参照车辆宽度构建了车辆形体分布.由于不同的交通参与者的横向偏离分布特性不同,如行人与自行车偏离多沿车道边缘分布;而汽车偏离则沿车道线分布,且偏离概率分布与车道宽度无关.
参照文献[21]对车辆纵向运动的模型描述,模型主要涉及4 个重要参数,分别是车辆沿轨迹的位置s、行驶速度v以及绝对加速度a.另有一个标准化加速度输入控制参数u,该参数的变化区间为[−1,1],其值为−1 表示车辆全力制动,为1 表示全力加速.此外,车辆在弯道上行驶时,还需加入转弯半径函数η(s)以及由速度v决定的车辆弯道切向加速度aT与法向加速度aN. 车辆纵向运动的微分方程表达式如下:
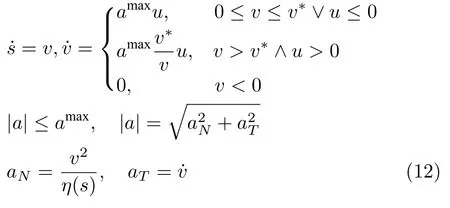
其中,受轮胎摩擦力所限制的绝对极限加速度amax与另一常量v∗由不同的交通参与者的特有性能所确定.本文的方法验证中暂不考虑弯道情形,且为了能够更加清晰地展示车道中的车辆踪迹分布情形,在以下仿真验证实例中将同一车道中多车跟驰时的踪迹分布独立地显示在不同的车道中,以防止可视化结果中不同车辆踪迹概率分布相互重叠带来的视觉误差.
3.1 参数标定
本文的仿真验证涉及两部分运算:离线安全关联矩阵的生成与在线预测的应用仿真.相关计算的参数标定原则如下:
离线部分所需基本参数包括车辆的位置S、速度V以及加速度控制输入命令U空间范围及其离散区段划分数目n,m,g.这一类参数可依据预测方法应用交通环境进行标定,如S取值范围可为车辆在直线道路上的可观测最大范围,V取值为车辆停止到道路准则允许的最大速度范围,U取值从全力制动(−1)到全力加速(1),离散化区段数目可依据期望预测准确程度而自行标定;本文验证计算中,式(7)中所用参数ε值则与离散划分有关,因其表征极小概率事件,而离线部分需验证的事件最少数目为n·m·g,因而其取值应小于 1/(n·m·g). 离线部分主要参数取值见表1.

表1 离线运算中主要参数Table 1 Main parameters used in offline operation
离线计算部分其他参数及在线计算所需基本参数包括为满足Lipschitz 连续条件而定的控制输入跳转控制参数γ,驾驶员在控制输入上的行为特性µ,车辆运动特性amax与v∗,驾驶员控制时间的相关参数τ与σ,以及车辆自由行驶时的初始控制输入分布qqq(i,j)(0) (假设为匀速行进).除依据参考文献确认的参数γ外,amax与v∗的值由实车验证获得,而其他参数µ,τ与σ则可依据实际情况分析而定,本 文仅给出示例演示数据.参数取值可见表2.

表2 驾驶行为及车辆特性Table 2 Driving behavior and vehicle characteristics
3.2 仿真示例
1) 跟驰过程中减速行为的验证例:为验证本文所提出的车辆安全跟驰模式预测建模方法,假设直行车道中 A,B,C三车前后依次排列同向行驶,A车位于行进方向最前方.为了模拟跟驰过程中的减速行为,将三车的初始速度按照行进方向的先后依次递增,其中 A 车速度恒定为 3m/s,且三车车型相同,均为宽 2m,长 5m.三车辆的初始属性见表3.
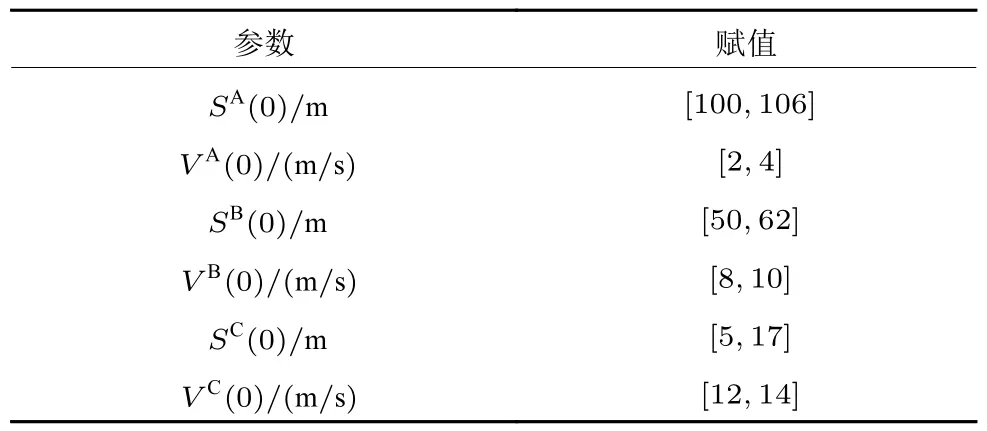
表3 初始属性-1:均匀分布集合Table 3 Initial state-1:Set with uniform distribution
利用离线计算所得马尔科夫链与仿真模拟所得控制输入优先概率信息,对该交通情形中三辆车在8 s 内的行驶情况进行模拟,其在MacBook Pro(2.3 GHz/双核/Intel Core i5)工作环境下MATLAB软件中的运行时间约为0.01 s,相应的可视化结果按时段划分如图3 所示.为了对比三车安全行驶情况,将三车的行进情形独立呈现在三条直线车道中.在分别对三车各自的分布颜色进行了归一化处理后,图中深色区域表示高概率分布,浅色区域表示低概率分布.预估时间区段内,三车加速控制输入及速度随时段的变化分别见图4、5.
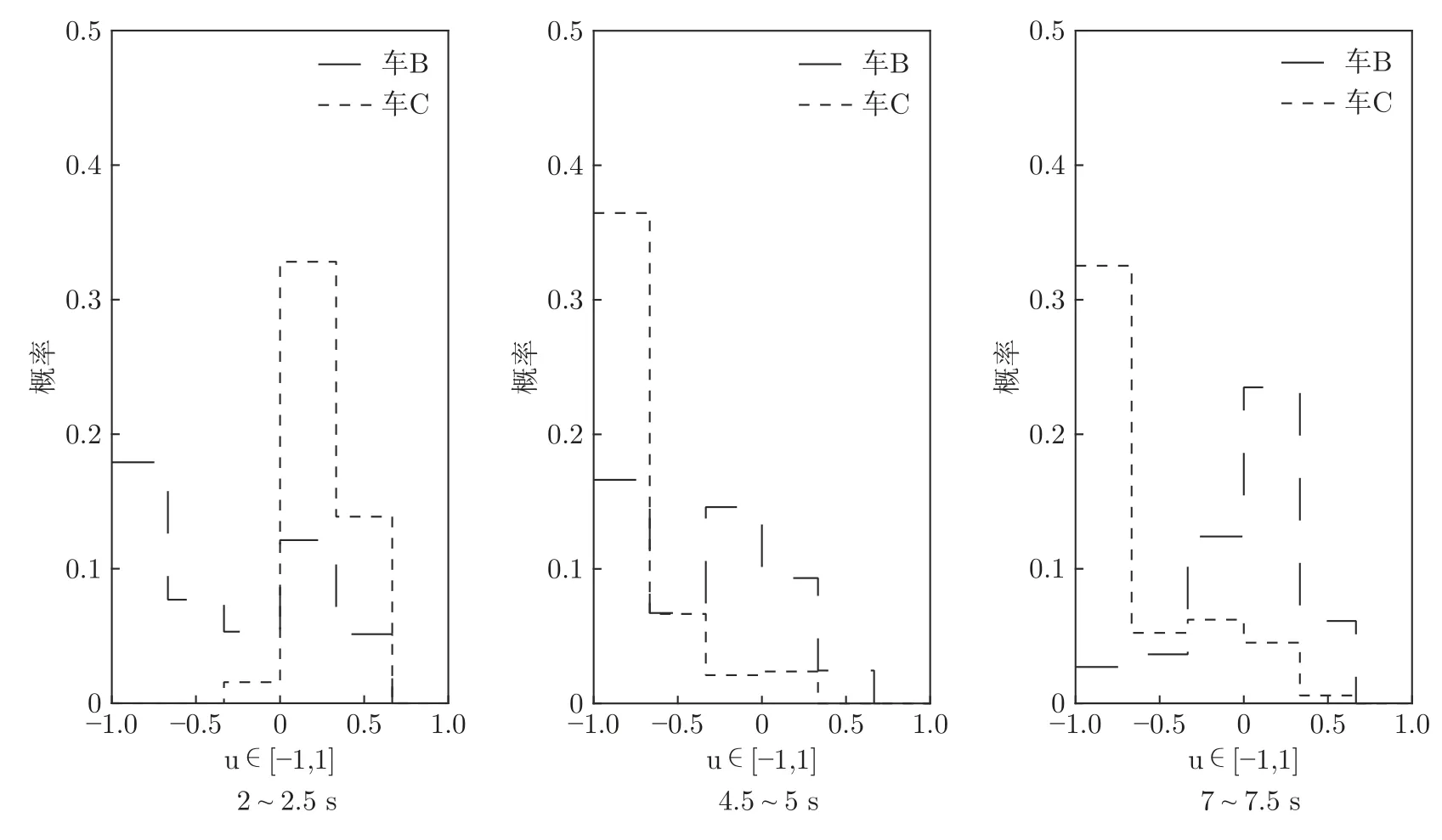
图4 不同时间区段的跟驰车辆控制输入直方图Fig.4 Control input histograms of following vehicles for different time intervals
由图3 可以看出,A 车的踪迹分布在4 个时间区段内最为稳定,而 B 车的踪迹分布变化较大,C车变化最强烈.其原因在于 A 车为引导车,速度小且稳定,因此每个时间区段内行驶的距离较短,踪迹分布较为集中;而 B 车初始速度快于 A 车,为了避免与 A 车碰撞,减速行驶,因此踪迹分布随时间的推移而逐渐收缩,最终与 A 车一致; C 车在三车中初始速度最大,因此初始阶段踪迹分布最广,且以 B 车为引导车辆,直接受 B 车速度变化.随着跟驰模式限制的向后传递,C 车的反应慢于 B 车,且其初始速度较大导致其速度降低到 A 车相近水平需时较长,因此 C 车的踪迹分布收缩较慢,直至最后时刻才趋于稳定.此外注意到,C 车的踪迹分布在第二个时间区段内的范围最大.
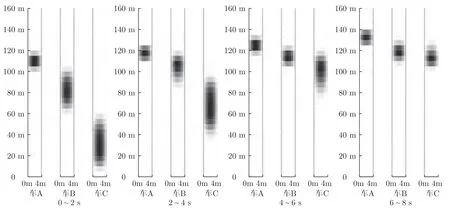
图3 不同时间区段的车辆踪迹分布Fig.3 Trace distribution of vehicles for different time intervals
由图4 可看出,在无法获知车辆既定跟驰控制策略时,车辆在安全跟驰模式下可选择的控制输入区段并非唯一,且符合一定的规律,如初始时段,B车选择减速行驶的概率较大,而 C 车减速的概率与力度均较小,直至 B 车已趋于正常行驶时,C 车才有一定概率与力度的减速操作,这一切与实际情形基本吻合.在此控制输入选择规律下,B车与 C 车的速度控制范围逐渐缩小,且为了保证安全行驶,两车以小于 A 车速度行驶的概率在增大(如图5).

图5 不同时间区段的跟驰车辆速度直方图Fig.5 Velocity histograms of following vehicles for different time intervals
2) 跟驰过程中加速行为的验证例:为了模拟预测跟驰过程中的加速行为(或称车辆追随行为),将三车的初始速度按照行进方向的先后依次递减,即A>B>C,其中A 车速度恒定为9 m/s,车辆初始属性见表4.对该交通情形中三车在8 s 内的行驶情况进行模拟,其可视化结果按时段划分如图6 所示.
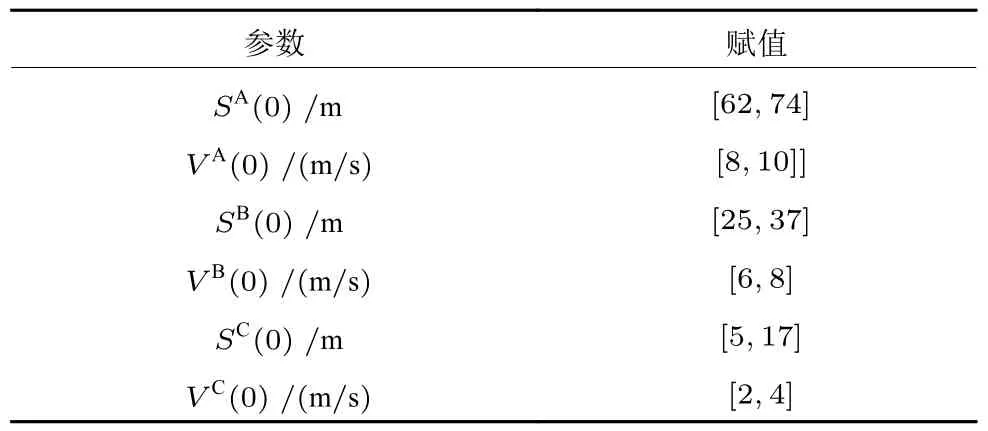
表4 初始属性-2:均匀分布集合Table 4 Initial state-2:Set with uniform distribution
由图6 可以看出,A 车的踪迹分布在4 个时间区段内最为稳定,而B 车的踪迹分布有一定的变化,C 车变化则最大.其原因在于A 车速度稳定,而B 车初始速度较小,趋近于A 车速度中,B 车可选择速度区段较多,因此踪迹分布随着时间的推移先逐渐扩展而后再次紧缩;而C 车初始速度最小,受B 车速度变化最大.随着跟驰模式限制的向后传递,C 车的反应慢于B 车,趋近于A 车速度需时较长,且C 车速度变化的可选择速度范围较广,因此其踪迹分布逐渐扩展直至最后时刻才趋于收缩.

图6 不同时间区段的车辆踪迹分布Fig.6 Trace distribution of vehicles for different time intervals
综合上述两个验证例分析可知,本文提出的形式化建模方法可正确地、完备地预估周边车辆在安全跟驰模式下未来行为动态的分布极限.文中提及的跟驰控制策略应是在某种安全原则下包含多种可行跟驰控制操作的方案集合,而非输出确定的、唯一的控制操作的跟驰决策,因此由上述验证推测该建模分析方法还可用于对此类跟驰控制策略的安全性验证.
3) 极小概率 ε 的验证说明:为了论证本文提出的建模分析方法对跟驰策略建模实现与安全验证的适用性,且考虑到跟驰策略中不包含极小概率事件,首先分析车辆行为预测模型中非安全事件的极小概率ε对行为模拟与碰撞概率数值的影响,特进行此示例验证.在此验证实验中,以减速验证条件(例1)为基础,将ε赋值为0.预估时间段内,例1 与3相应的三车之间的碰撞概率对比如图7 所示.就模拟的车辆踪迹分布而言,参数ε的直观影响并不显著,即例3 相应的车辆踪迹可视化结果与图3一致,在此省略其结果展示.
由图7 可发现,在基本条件一致的情况下,极小概率事件的引入对整体跟驰情形中碰撞概率影响较小.这说明跟驰模式预测中的碰撞概率主要来源于车辆行为的不确定性,且极小概率赋值的变化不会引起跟驰模式碰撞概率的较大波动.此仿真验证例是一种含极限安全原则的验证评定,也可视为对无特定安全控制策略的极限跟驰行为的风险统计评价,初步说明了本文提出的方法可用于对跟驰控制策略的有效建模分析与安全验证.
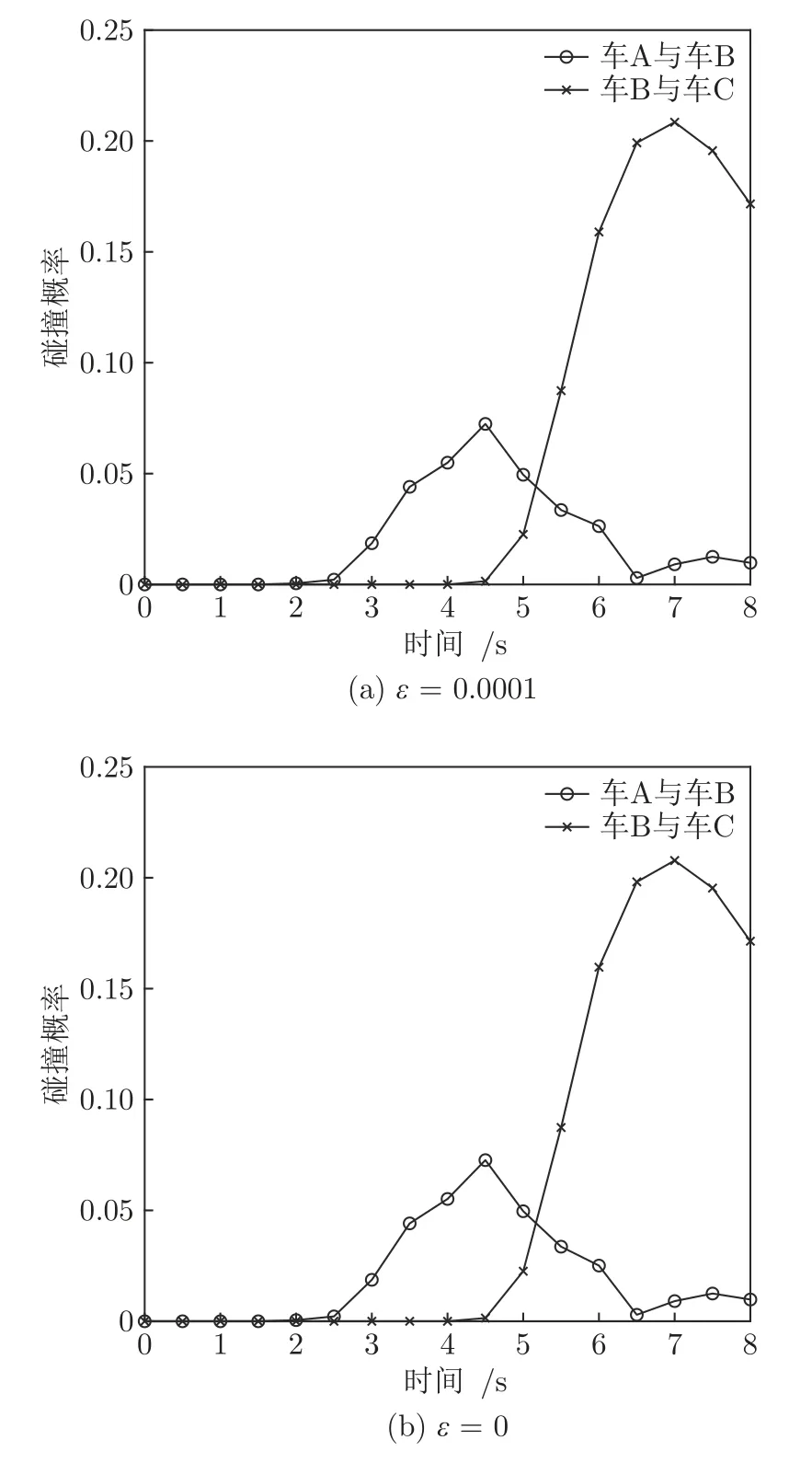
图7 跟驰情形中的碰撞概率Fig.7 Collision probability in vehicle following
4) 固定车头间距的验证例:考虑到与前方车辆保持一定车头间距的实际操作是安全跟驰的普遍共识,因而在图2 计算流程的“初始位置判断”、“跟驰控制判断”及“最终行为判断”中为两车增设固定车头间距,构成一种包含最简单安全控制原则的跟驰策略,通过本验证例分析此跟驰控制策略的安全性,并进一步论证本文建模分析方法对跟驰策略模拟与安全验证的有效性.在此验证仿真中设定安全车间距为3 m.为此重新确定离线安全关系矩阵,并将其应用于减速验证例的跟驰情景中.此时三辆车在0~8 s 内的行驶情况的可视化结果按时段划分如图8 所示,碰撞概率如图9 示.
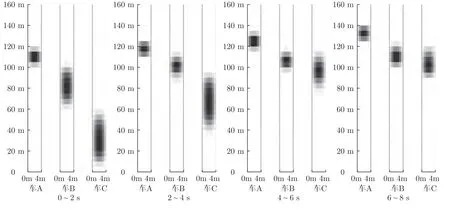
图8 不同时间区段的车辆踪迹分布Fig.8 Trace distribution of vehicles for different time intervals
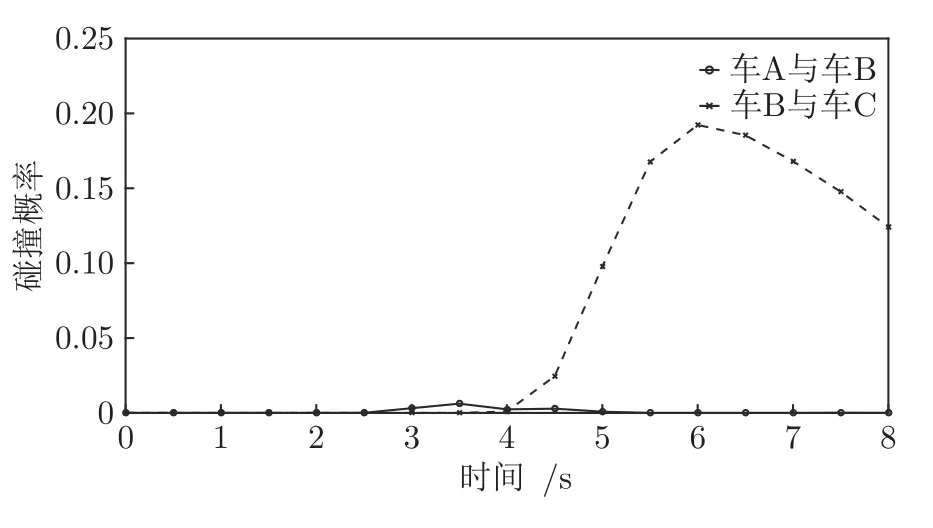
图9 跟驰情形中的碰撞概率Fig.9 Collision probability in vehicle following
图8 显示结果与减速验证例中图3 基本一致,但仔细观察C 车的踪迹分布变化情况可发现,由于离线安全判定中增设了车头间距,因此在有限距离与时间范围内,C 车平均速度降低的过程缩短,其车速接近前车的速度加快,导致在相同时间段内,图8 中C 车的行进距离小于减速验证例中图3 的结果.特别在图8 中6~8 s 时段内,C 车踪迹分布的最远距离较图3 情形靠后约两个纵向区段(由于系统色域数值限制,图8 与图3 未能对部分小概率踪迹分布情况进行显示,两图中C 车在最后时间段内踪迹分布的最远位置分别为122 m 与126 m),且图3 中C 车踪迹分布概率较大的中段部分大于图8两个纵向区段,也是减速验证例中C 车平均车速大于该验证例平均车速的又一佐证.
与图7(b)相比,图9 中的非零碰撞概率整体大幅下降,可见跟驰行为中的极限安全操作往往将演变成一定概率的危险碰撞事件,而增设固定车头间距的跟驰策略有助于减少跟驰情形中由车辆行为不确定性导致的碰撞事件,这一结果不仅说明了此跟驰控制策略的安全性,也基本论证了本文建模方法对跟驰策略安全性验证的有效性.进一步的方法应用验证将通过对更加复杂详尽的安全跟驰策略的分析模拟而实现,具体工作将在其他研究中体现.
4 结论
传统车辆跟驰行为预测的建模方法只能输出跟驰车辆在确定控制决策或原则下的单一轨迹信息,在无法获知周边车辆准确跟驰控制策略的情况下,未能对车辆不确定行为特性进行完整预测与表征,因而从理论上不足以保证对周边车辆安全跟驰模式预测的可信性.为此,提出车辆安全跟驰模式预测的形式化建模方法,通过示例验证得如下结论:
1) 与传统车辆跟驰建模预测方法相比,基于可达集表征的跟驰行为形式化建模方法不仅能精确、清晰地描述车辆跟驰动态的混合系统特性,而且能够自动遍历车辆运动系统的完整状态空间,保证了对车辆未知跟驰行驶控制与传感器测量误差等不确定因素的表现力,从理论上保障了对周边车辆跟驰预测的完备性.
2) 通过离线构建跟驰模式下关联车辆在状态及控制输入之间的安全关联矩阵,描述跟驰车辆可能的控制输入选择规律,表达了车辆之间的行为关联影响且提高了在线计算效率.
3) 可视化车辆行为模拟表现了车辆踪迹的变化特征,通过车辆状态随机可达集的马尔科夫逼近,实现车辆踪迹分布风险的精确概率评价.时间区段上的车辆踪迹分布可视化实验手段,也从本质上改变了传统跟驰建模方法与定性验证方式,实现了对跟驰策略安全性验证的定量评价.
本文基于凸多边形表征的可达集适用于2~3维状态空间中的可达性推演,因此该方法对所模拟系统的变量数目有所限制,且本文建模思想的有效性依赖于对周边车辆当前态势信息的有效感知.然而,鉴于该方法对不确定行为模拟与验证的有效性,未来将就更加复杂的常规跟随策略进行效果验证,并可结合极大似然估计方法实现对控制策略中最佳方案的在线决策应用.