一种幕墙清洗机器人姿态控制算法的研究
2021-12-01吴明晖
张 培,吴明晖
(上海工程技术大学 机械与汽车工程学院,上海 201620)
0 引言
目前大楼数量越来越多,随之而来的是玻璃幕墙的清洗任务,通过传统的人工悬挂缆绳的方式进行的清洗,效率低,费时费力,不仅成本高,并且危险系数大[1-2]。所以设计清洗机器人不仅能够提升清洗效率,而且可以减少危险事故的发生。本文设计的多涵道幕墙清洗机器人,通过涵道风扇提供清洗的吸附力以及越障的推力,当机器人在玻璃幕墙表面进行清洗时,会受到风力和绳的拉力等外界因素的影响,幕墙清洗机器人在空中的姿态角度会发生很大的晃动,从而影响机器人在壁面的清洗效果以及能否顺利的越过窗框等障碍物[3]。幕墙清洗机器人的姿态控制算法的研究至关重要,本文设计了一款增量式滑模控制算法,通过数据传感器采集100 组的角度值,该角度值是幕墙机器人分别沿X轴、Y轴、Z轴的姿态角度值,对机器人在X轴、Y轴、Z轴的姿态角度值分别进行仿真分析,在未受到外界干扰和受到外界干扰的两种情况下分别进行实验,仿真出幕墙清洗机器人沿X轴、Y轴、Z轴的角度姿态值随时间的变化曲线图[4]。
通过滑模控制算法,在无外界因素的干扰下,清洗机器人的姿态角度沿X轴、Y轴、Z轴的变化范围非常小,在空中能保持稳定的姿态[5]。当有外界因素的干扰下,机器人沿Z轴的姿态角度一开始变化较大,最终会在预先设定姿态角度目标值附近波动,机器人在X轴,Y轴的姿态角度值变化幅度较小。
本文基于对高楼幕墙清洗作业的需求,设计了多涵道幕墙清洗机器人,搭建了基于滑模控制原理的控制系统,实验结果表明,该系统运行稳定,符合高楼作业的需求。
1 幕墙清洗机器人总体介绍
幕墙清洗机器人整体方案设计包括楼顶起吊装置、机器人本体和地面监控平台,如图1 所示[6]。楼顶起吊装置是在楼顶铺设导轨,通过缆绳提升实现清洗机器人在壁面的上下运动,本文设计的机器人本体是多涵道幕墙清洗机器人,机器人地面监控平台可以实时了解幕墙清洗机器人在壁面的运动和清洗情况,实时反馈到地面平台,供地面人员实时观察机器人的运动及清洗效果。
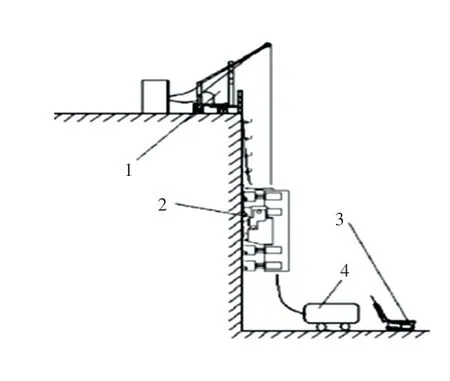
图1 整体的系统设计Fig.1 Overall system design
2 幕墙清洗机器人本体结构设计
多涵道幕墙清洗机器人结构设计包括清洗单元、吸附力单元和移动单元。首先通过三维仿真软件Solidworks 仿真出机器人的三维模型图;其次,对多涵道幕墙清洗机器人的结构进行设计和搭建。清洗机器人的结构主要包括涵道风扇、涵道风扇电机、框架、清洗电机、毛刷、电机罩和脚轮等,如图2 所示。移动机构包括水平移动机构和垂直移动机构。水平移动机构是清洗机器人在玻璃幕墙表面的横向运动,垂直移动机构通过在楼顶铺设卷扬机,缆绳来牵引机器人本体在壁面的上下运动。
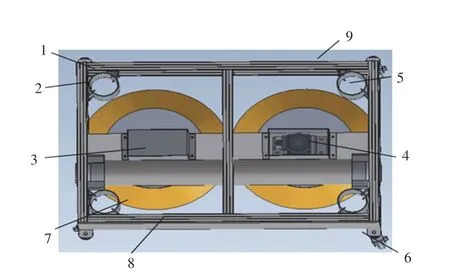
图2 机器人本体图Fig.2 Robot body diagram
多涵道幕墙清洗机器人左右分别各有4 个涵道风扇,通过涵道风扇的转动产生清洗壁面的吸附力以及越障的推力,壁面大都是玻璃材质的,非常脆,极易发生破损。毛刷的材料是尼龙材质,较柔软,不会对玻璃壁面造成损害。幕墙清洗机器人左右各有一个毛刷,通过直流有刷电机来驱动毛刷的转动,电子调速器来调节电机的转速,从而控制毛刷的清洗速度和力度。多涵道幕墙清洗机器人在清洗和越障过程中,机器人很容易撞到玻璃幕墙上,所以在底脚装有脚轮,可以起到防撞保护作用。
3 机器人的控制系统设计
3.1 机器人硬件控制系统设计
多涵道清洗机器人的本体部分的设计主要采用是无人机的原理,通过螺旋桨的转动产生清洗的吸附力以及越障的推力,本文的涵道风扇的原理基于螺旋桨的转动,设计出的多涵道幕墙清洗机器人横移机构上有两个涵道风扇以及清洗驱动电机,陀螺仪用来控制机器人的姿态角度,超生波测距用来识别和检测机器人距离障碍物的距离[7]。幕墙清洗机器人的蓝牙模块是通过上位机界面与机器人本体进行连接,摄像头将采集到的清洗机器人的信息反馈到地面监控平台,电磁继电器来控制电机的闭合,脚轮是防止机器人撞到玻璃幕墙[8]。
3.2 幕墙机器人姿态控制器的研究
多涵道幕墙清洗机器人在壁面清洗和运动的过程中,机器人本体姿态会受到外界环境因素的干扰,机器人在壁面清洗时,风力的大小、缆绳收放时拉力的大小都会对机器人在壁面清洗和运动时产生影响。图3 是多涵道幕墙清洗机器人控制器的设计,当机器人在玻璃壁面清洗和飞升越障时,机器人与玻璃幕墙表面处于平行的状态。幕墙清洗机器人在玻璃表面清洗时,机器人在空中的姿态会发生很大范围的晃动,从而会影响机器人在壁面的清洗效果和能否安全的越过窗框等障碍物[9]。多涵道幕墙清洗机器人的横滚角是机器人的本体绕提升缆绳的姿态角度值,当机器人的姿态角度不能保持稳定时,可能会导致机器人撞到玻璃幕墙表面[10]。根据这状态设计出增量式滑模控制器,滑模控制能够根据系统的状态的变化做出实时的改变,且受到外界因素的扰动较小,通过预先设定目标角度,清洗机器人的姿态角度值最终在目标角度附近来回波动。通过滑模控制算法,清洗机器人在空中的姿态角度变化较小,不会产生大范围的晃动。
3.3 外界干扰下机器人姿态角度的变化
多涵道幕墙清洗机器人在Z轴姿态角度随时间变化关系如图4 所示。
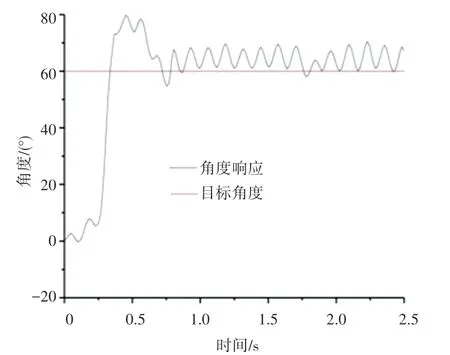
图4 涵道机器人绕Z 轴的角度姿态图Fig.4 Angle and attitude diagram of ducted robot around Z axis
有外界扰动的情况下,清洗机器人在X轴姿态角度值在2°左右变化。多涵道幕墙清洗机器人在X轴的姿态角度变化较小,机器人沿X轴姿态角度随时间变化关系如图5 所示。
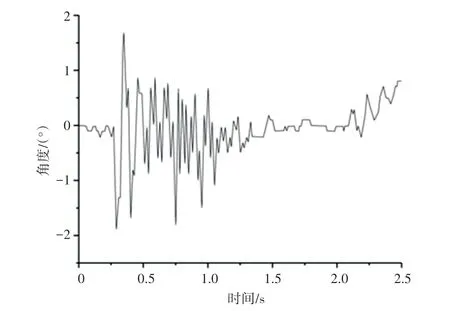
图5 涵道机器人绕X 轴的角度姿态图Fig.5 Angle and attitude diagram of ducted robot around X axis
当有外界扰动及干扰情况下,在Y轴的姿态角度变化范围在-3°~1°左右,涵道清洗机器人在有扰动情况下,在Y轴的角度变化较小,涵道清洗机器人在沿Y轴转动时的角度姿态变化,如图6 所示。
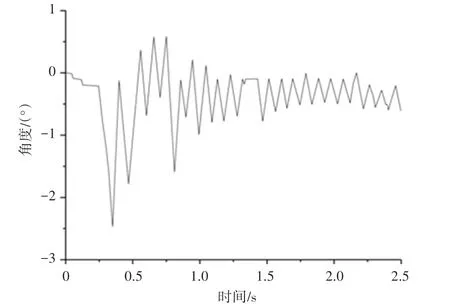
图6 涵道机器人绕Y 轴的角度姿态图Fig.6 Angle and attitude diagram of ducted robot around Y axis
3.4 未受到外界干扰机器人姿态角度变化
在未受到外界干扰情况下,通过数据采集卡采集100 组姿态角度值,清洗机器人姿态角度值在1°左右变化,多涵道幕墙清洗机器人在X轴姿态角度随迭代次数变化关系如图7 所示。通过实验分析可知,滑模控制器具有很好的鲁棒性。
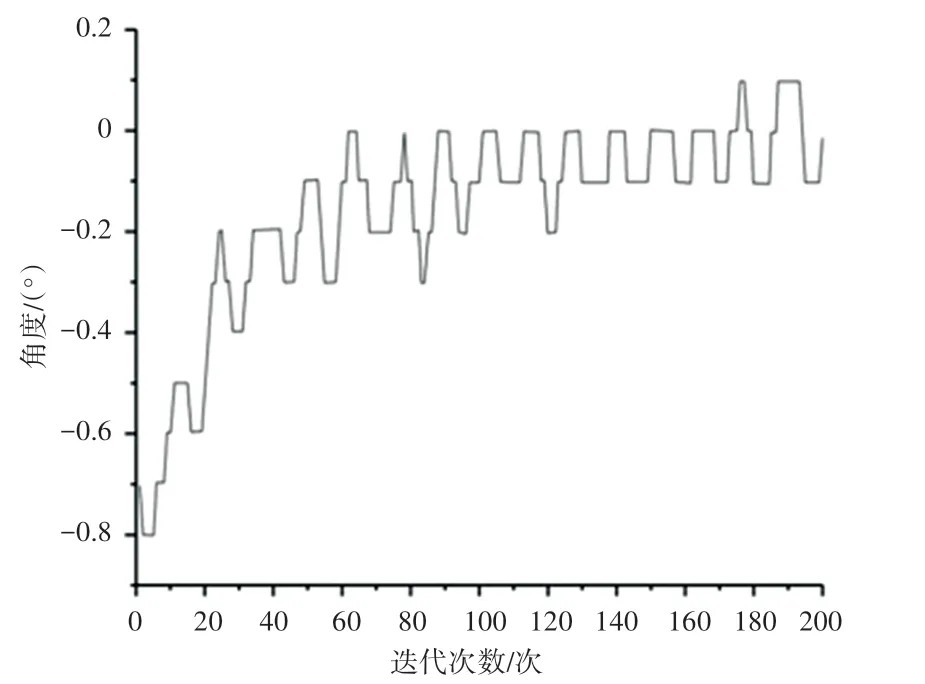
图7 未扰动涵道清洗机器人绕X 轴的角度图Fig.7 Angle diagram of undisturbed ducted cleaning robot around X axis
清洗机器人姿态角度值在5°左右变化,在未受到外界干扰的情况下,多涵道幕墙清洗机器人在Y轴姿态角度随迭代次数的变化关系如图8 所示。可知,机器人的姿态角度值变化较小,在滑模控制下,幕墙清洗机器人姿态能保持稳定。
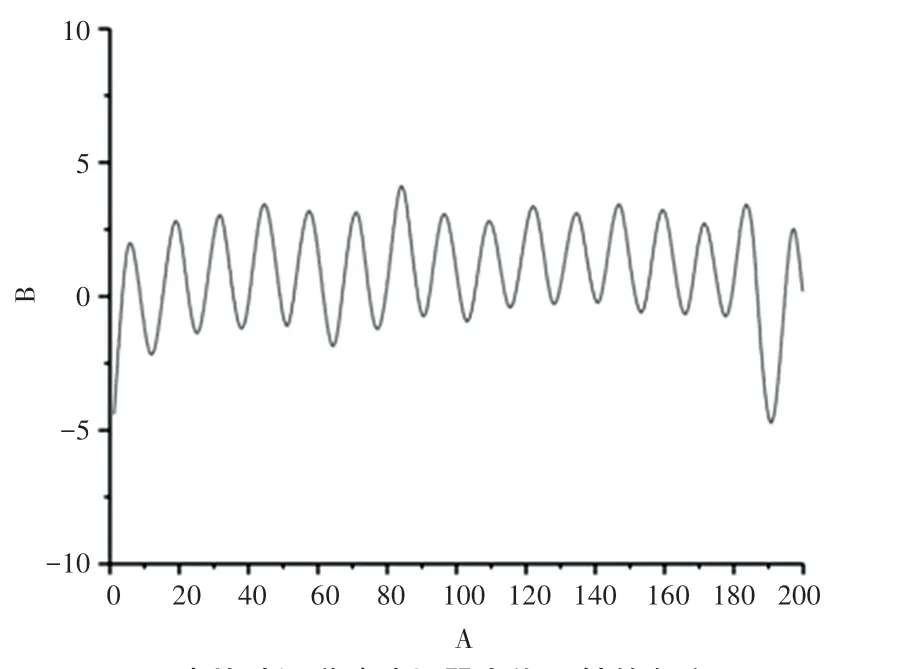
图8 未扰动涵道清洗机器人绕Y 轴的角度图Fig.8 Angle diagram of undisturbed ducted cleaning robot around Y axis
机器人在Z轴的姿态角度值在0°~100°左右,在未受外界干扰下,清洗机器人沿Z轴姿态角度随迭代次数变化关系如图9 所示。可知,机器人姿态角度值变化范围较大。姿态角度值最终会稳定在80°左右。

图9 未扰动涵道清洗机器人绕Z 轴的角度图Fig.9 Angle diagram of undisturbed ducted cleaning robot around Z axis
4 结束语
本文首先对多涵道幕墙清洗机器人结构进行设计,包括对机器人的涵道风扇、涵道电机、框架、脚轮、毛刷、清洗电机进行设计;其次,通过对滑模控制算法的研究,设计增量式滑模控制器并对机器人姿态进行控制,采用simulink 对滑模控制器进行实验仿真分析,在滑模控制器下,当有外界扰动和无外界扰动的情况下,多涵道幕墙清洗机器人的姿态角度的变化较小,机器人的姿态得到稳定的控制。
