一种智能鞋柜存取鞋装置设计
2021-11-29刘鑫明周洪艳薛晓龙刘晓宇
刘鑫明 , 周洪艳 , 薛晓龙 , 张 硕 , 王 鑫 , 刘晓宇
(长春师范大学工程学院,吉林 长春 130032)
随着现代科技的发展,人们对智能家居的要求越来越高,越来越喜好利于身心的智能家居产品[1]。据调查,超过89%的用户期待未来能够广泛普及智能家居自动化产品[2]。智能鞋柜在传统鞋柜的基础上结合了现代科技,市场上的智能鞋柜一般只具有杀菌消毒功能。当用户进入家门时,鞋子一般会随便摆在地上或者不经整理放入鞋柜中,鞋子只能手动存取,会出现整理不及时的问题,具有自动存取鞋的智能鞋柜能够满足智能家居自动化产品市场和用户的广泛需求。本文设计智能鞋柜的存取鞋装置部分,可以自动将鞋子摆放合适的鞋格内,不需用户手动整理,从而解决手动存取和整理不及时的问题,实现存取鞋稳定性和高效性。存取鞋装置通过程序控制步进电机旋转,将旋转产生的动力传递给丝杠和齿轮进行传动,通过升降机构和移动存取鞋机构达到高效存取鞋的目的。
1 存取鞋装置总体设计
存取鞋装置由升降机构、移动存取鞋机构组成,滑动导轨和光杠的设计使升降结构具有更高的稳定性,步进电机通过齿轮传动将动力传递给丝杠螺母传动机构。通过步进电机驱动滚珠丝杠传动机构的传动刚度、受力情况、传动比和运动控制精确定位和运动控制[3],从而设计系统所需要的丝杠尺寸。当用户存鞋时,垫板上的夹紧装置将鞋子固定,螺母丝杠传动机构将鞋子上升至指定位置后,齿轮机构平动将鞋子转移至指定位置,实现存取鞋的功能。在人机交互方面,用户可以选择直接开关柜门存取的传统方式,也可通过自动存取鞋板装置实现存取鞋功能。存取鞋装置如图1所示。
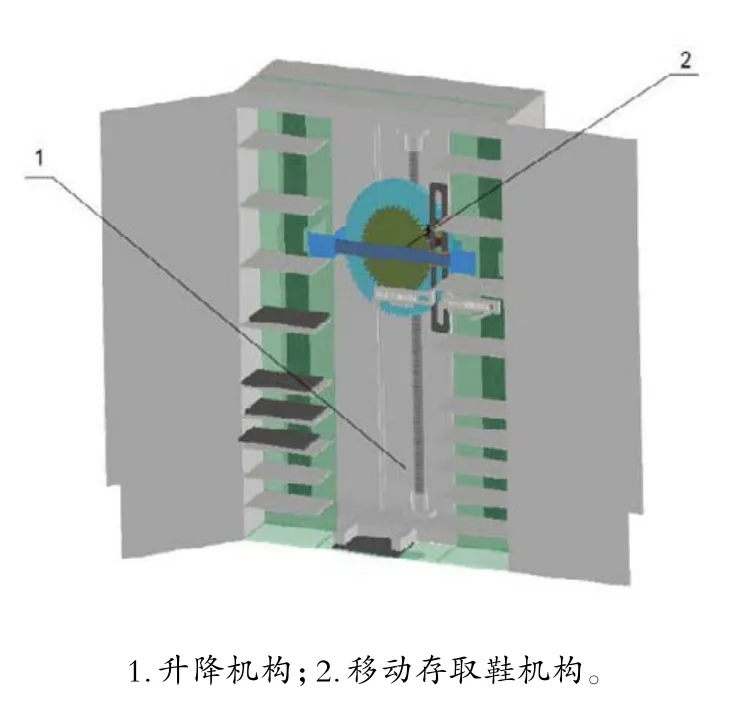
图1 存取鞋装置
1.1 升降机构设计
升降机构由步进电机、光杠、螺母、丝杠、轨道组成,利用丝杠的传动将鞋子升降至指定位置,光杠和轨道的加入可以使系统更加稳定和精准完成升降的过程。夹紧装置设计在鞋垫板上的左右两侧,通过推杆的推动实现夹紧过程,夹紧装置实现鞋子的定位、固定、夹紧作用,避免了在升降鞋过程出现鞋子不稳固的现象。鞋垫板通过丝杠的转动,在丝杠螺母上从装置底层运动到指定位置,通过与移动存取鞋机构的传递,可完成对鞋子的定位存取。升降机构如图2所示。
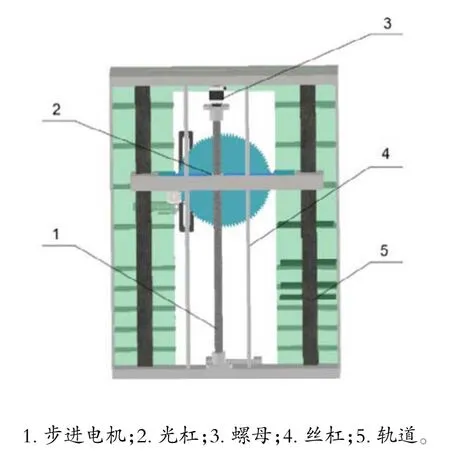
图2 升降机构
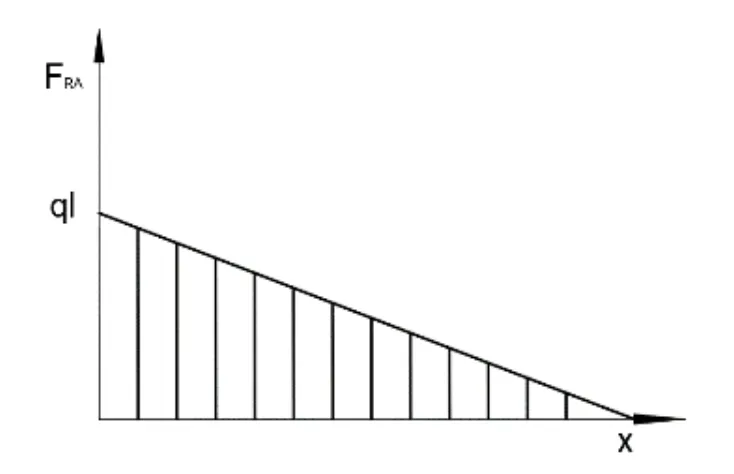
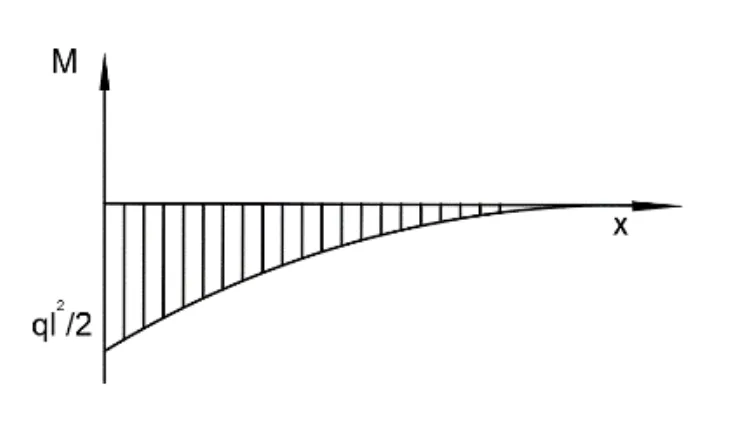
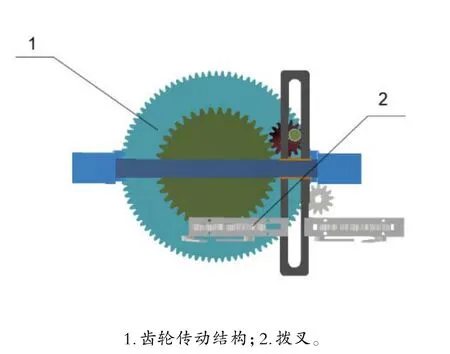
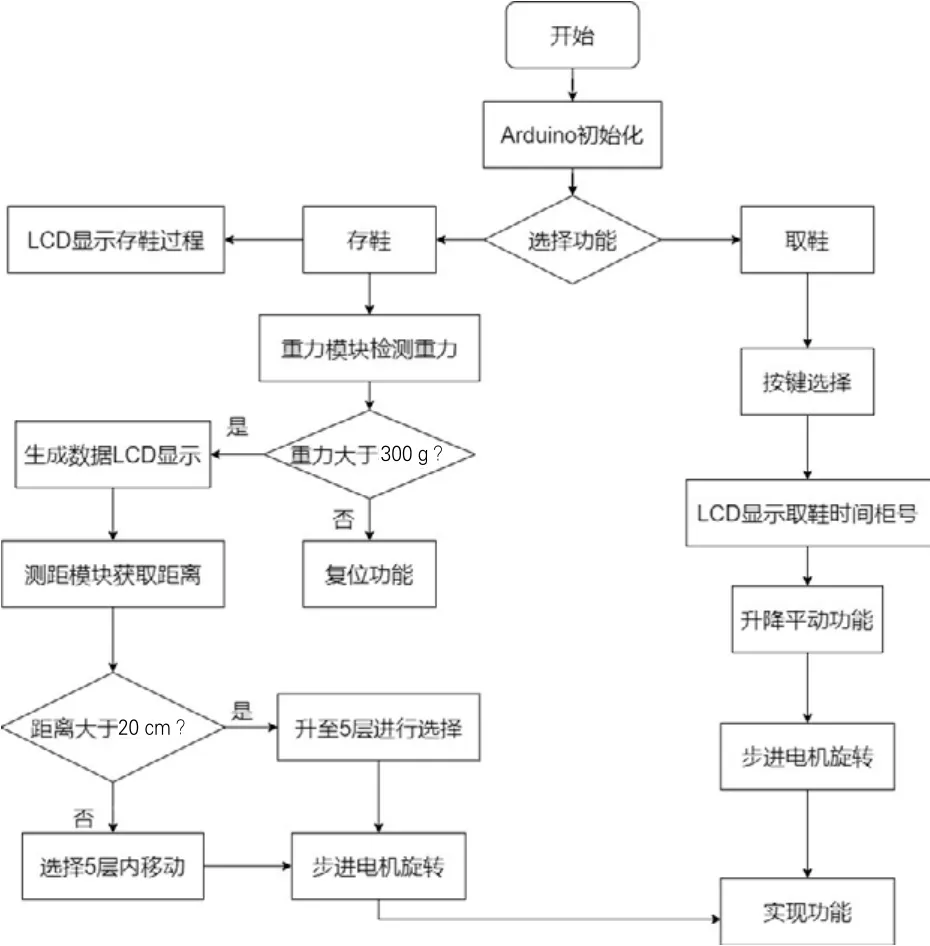
丝杠和垫板组成结构可视为悬臂梁结构,其截面是矩形截面,因丝杠结构组成的固定端约束了鞋子和垫板组成的端界面的移动和转动,所以存在铅垂直约束力FRA和约束力偶MA。根据平衡方程ΣFy=0和ΣMA=0,求得又截面右侧是均布载荷,如图3所示,用右侧的外力计算剪力和弯矩,如图4、图5所示,直接算出Fs(x)=q(1-x)(0 图3 均布载荷图 图4 剪力图 图5 弯矩图 移动存取鞋机构由齿轮传动结构、拨叉组成,移动存取鞋机构通过齿轮副传递动力运动,运动过程采取齿轮传动。齿轮传动的优点是精度高,可以让垫板准确到达指定位置。齿轮的应用非常广泛,生产批量大,直齿圆柱齿轮采用精密成形工艺,可以提高材料利用率和齿轮强度[4],通过精密工艺可以满足所需齿轮强度要求。输出端齿轮平动过程将垫板输出到指定鞋格内。该装置采用小齿轮带动大齿轮的减速机构,传动比为6.9,传动选用直齿圆柱齿轮传动。在受力过程中,直齿圆柱齿轮主动轮上的圆周力和它的速度方向是相反的,从动轮上的圆周力和它的速度方向是相同的,径向力都各自指向齿轮的中心。小齿轮与步进电机连接作为动力源,通过齿轮正弦机构将步进电机的转动转化为左右方向的圆周曲线运动,并通过左右共四个拨叉的伸缩进行存取功能。拨叉通过齿轮组传动实现开合动作,每个齿轮组采用五个相同的齿轮啮合传动。齿轮组两端用同一步进电机进行驱动,使得两边拨叉运动同步,将步进电机转速提高加快齿轮转动速度,从而让拨叉弹出的时间减短,加快存取的过程。移动存取鞋机构如图6所示。 图6 移动存取鞋机构 电动机在整个过程中起着提供动力的作用,选用合适的电动机显得尤为重要,本研究选择丝杠部分电机。首先选择电动机的种类,选择的方案有3种:直流电机、步进电机、伺服电机。从精度上考虑排除直流电机的选择,经过市场价格调研,伺服电机价格通常远高于步进电机,故选择相对经济的步进电机,根据步距角越小步数越多越精确的原理,采用步数更多的步进电机以提高精度。 电动机的类型选择为步进电机,接着进行型号的选择。在升降机构中,已知螺杆的长度L=2 m,丝杠传动机构所受的力分别来自齿轮机构和垫板的自重,丝杠工作台与工作物的总质量约为m=5 kg,螺杆的轴径D=32 mm,导程P=6 mm,螺杆的材料密度ρ=7.9×103kg/m3,取滑动摩擦系数μ=0.2。 根据以上分析选择型号为AR911AA-1的步进电机作为丝杠传动的传输电机。该电机安全系数16.27,惯性比7.41,加减速常数100,最高转速1 500 r/min。该转速满足设备正常运转所需速度,安全系数较高,故满足设计要求。 智能鞋柜存取鞋系统由Mega2560、电源模块、超声波测距模块、LCD1602显示屏、独立按键、3个步进电机、压力传感器组成。通过Arduino编程软件将程序导入Mega2560中,利用控制面板中的程序对系统中的鞋子的存取装置、传输升降机构进行控制,使智能鞋柜存取鞋装置自动运转。 鞋柜上嵌入LCD显示屏,当用户存取鞋时,超声波模块检测鞋子的高度,系统从执行任务开始记录时间,数据实时显示,方便用户得知系统内部状态。鞋柜内有终止按钮,该按钮可终止系统的一切动作,所有步进电机暂停,此时用户可执行手动存取鞋功能,如果按下复位键,系统会复位到初始位置,如果没有执行手动存取鞋,可再次按下终止键,系统将继续执行没有完成的命令。 存取鞋装置操作完毕自动复位至初始位置,复位在一定程度避免每次存取所带来的系统误差。当系统执行存鞋命令时,首先压力传感器检测到鞋子的重量,超声波测距模块检测鞋子的上截面到模块间的距离,识别鞋子属于普通高度或较高高度的鞋型,根据鞋子重量和高度分别确定相应存放位置。当系统执行存鞋命令时,步进电机转动驱动丝杠将平移装置移动到底端,齿轮组转动带动拨叉的打开,当拨叉伸入垫板下,夹紧装置启动,将鞋子下的垫板夹紧。通过步进电机的转动将丝杠导轨升降机构上升到指定高度,齿轮传动电机进行平移操作,接着齿轮组进行拨叉的收回将鞋子放入鞋格内[5]。 当系统执行取鞋命令时,用户直接按下取鞋键,系统对最后一次存鞋的格子执行取鞋操作,升降机构将运动到鞋柜底端,从鞋柜底端步进电机旋转带动取鞋装置上升到鞋格位置。齿轮传动将平动系统带入鞋格内,拨叉伸出提起鞋垫板,将鞋子转运到鞋柜底端以便取鞋,鞋子取走后,取鞋装置复位,设置3分钟如果没有执行取鞋动作,存鞋装置将重启并执行存鞋过程。系统流程图如图7所示。 图7 系统流程图 综上所述,智能鞋柜存取鞋装置能够解决手动存取、整理不及时的问题。与市场上广泛应用的具有杀菌消毒功能的智能鞋柜相比,另加自动存取鞋功能,更加智能化、多样化与人性化。本设计利用升降机构和移动存取鞋机构实现自动存取鞋功能,鞋垫板上的夹紧装置和升降机构上的轨道使得整个系统更加稳定。另外,采用螺母丝杠传动和齿轮传动的方式实现鞋子的自由存取,所选用的螺母、丝杠、齿轮比较常见,方便维修且价格便宜,适合面向普通用户的消费,具有一定的市场开发价值。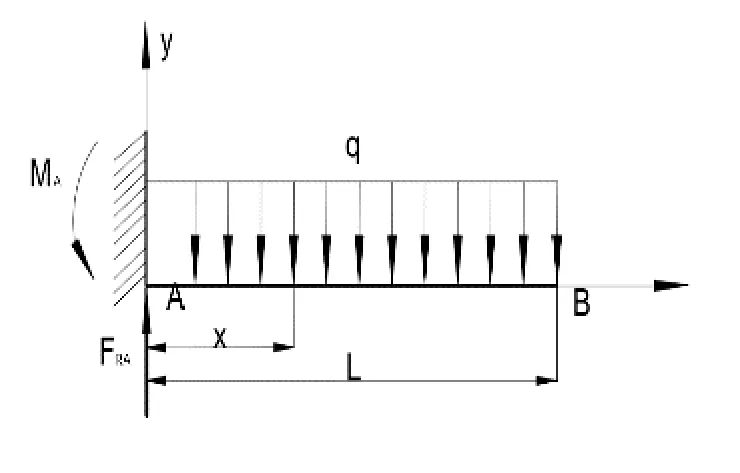
1.2 移动存取鞋机构设计
2 电动机的选型
3 运动原理分析
4 结语
