基于SVD-ITD和支持向量机的潜水磨碎泵故障诊断
2021-11-27李志国高鹏涛谢亚杰
李志国,林 彬,高鹏涛,谢亚杰
(江苏大学 流体机械技术研究中心,江苏镇江 212001)
0 引言
随着工业的快速发展,潜水磨碎泵在处理包含大量固体悬浮物和其他纤维杂质的污水中有着不可或缺的地位,但由于潜水磨碎泵结构的特殊性,其流道易发生堵塞,这将造成磨碎泵的水力性能下降,效率降低。一般情况下通过在潜水磨碎泵上安装侵入式传感器,分析磨碎泵的振动数据,或者根据压力、流量、温度等数据,对其早期故障进行检测和诊断[1-6]。但是这些侵入式传感器不仅会在泵运行过程中带来不便,而且在长期运行状态下的可靠性会降低,这会导致系统的整体稳定性变差,并无法正常检测和诊断潜水磨碎泵的堵塞程度。因此,不通过安装额外传感器对运行状态下的磨碎泵进行监测具有十分重要的现实意义。
电机定子电流信号监测具有非侵入式安装、操作便捷、信息传递路径少、抗干扰能力强、价格低廉等优点。目前国内外已有一些基于电机定子电流监测法实现泵状态监测的研究。胡河宇等[7]对液压柱塞泵进行了定子电流的谐波分析,结果表明泵的流量脉动会在定子电流中引起多余的谐波成分。MOHANTY等[8]对单级单吸离心泵的振动信号和定子电流信号进行分析,结果发现振动谱中的故障特征频率与解调制后的定子电流谱中特征频率几乎相等。李晓俊[9]研究了电机定子电流与离心泵空化之间的联系,提出定子电流波动的幅值会随着空化程度的增加出现一定的变化。石洋等[10]提出了基于电机电流测量离心泵转速的方法,并通过试验对此进行了论证。
泵的电流信号是一个电网工频为主的非线性信号,所包含的故障信息很微弱,特别是在不同的故障情况下,很难直接从电流信号得出故障类型。奇异值分解(SVD)是线性代数中一种重要的矩阵分解方法,是特征分解在任意矩阵上的推广,被广泛应用于信号处理、统计学等领域[11-13]。利用SVD滤除或减弱电网工频分量可以有效提高泵运行状态的电流分量占比[14]。
固有时间尺度分解(Intrinsic time-scale decom-position,ITD)用于分析非线性、非平稳信号,具有较高的分解效率和频率分辨率。它将一个复杂的信号分解成若干个旋转分量(PRCs)和一个单调残差,具有端点效应小,分解能力强,计算速度快的特点。明显优于经验模态分解(Empirical Mode Decomposition,EMD)和局部均值分解(Local Mean Decomposition,LMD)方法,有利于实现在线故障诊断[15-18]。
针对潜水磨碎泵流道堵塞故障,本文在前人研究的基础上,提出一种利用SVD-ITD和支持向量机相结合的磨碎泵流道堵塞故障诊断方法。该方法只利用了电机电流信号,通过SVD-ITD对不同堵塞故障下电流信号进行处理,得出不同堵塞程度下的特征向量,构建基于支持向量机的故障分类模型。结果表明该方法能有效诊断不同流道堵塞的故障,为磨碎泵流道堵塞故障高远程诊断提供了新思路。
1 分析方法介绍和技术路线
1.1 技术路线
本文针对潜水磨碎泵流道堵塞故障诊断提出了SVD-ITD和支持向量机的新方法,主要是通过电机的电流信号进行故障诊断。其中主要包括利用SVD-ITD对信号处理,得出故障特征向量,构建支持向量机故障诊断模型进行识别,具体方法流程如图1所示。
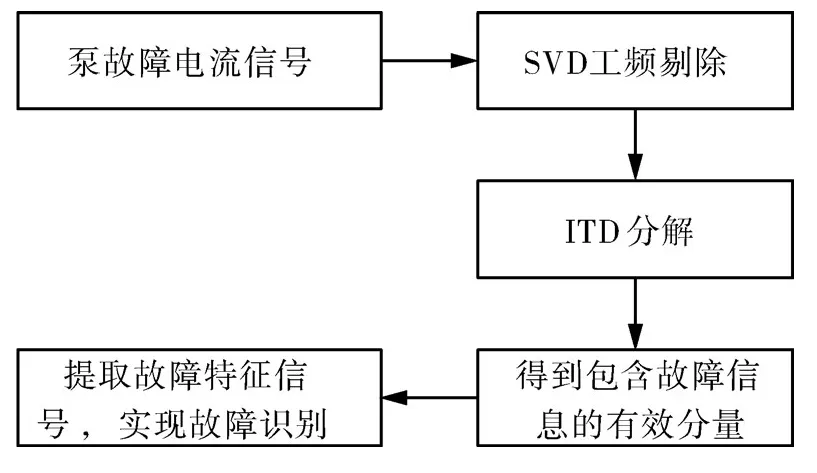
图1 潜水磨碎泵流道堵塞故障诊断流程Fig.1 Flow chart of fault diagnosis of flow channel clogging of submersible grinding pump
首先,将磨碎泵的电流信号进行奇异值分解(SVD)处理,其目的是将工频50 Hz的信号滤除,得到电流信息的微小信号;其次,将得到的微小信号进行固有时间尺度(ITD)分解,得到若干旋转分量,选取主要包含故障信息的有效旋转分量;最后提取故障特征信息,实现故障识别。
1.2 奇异值分解(SVD)
奇异值分解在某些方面与对称矩阵或Hermite矩阵基于特征向量的对角化类似,是谱分析理论在任意矩阵上的一种推广,其具体理论描述如下。
已知一个N×M型长方形矩阵A,找到2个酉矩阵U,V(其中U∈RN×N,V∈RM×M,U·UT=V·VT=I,U,V均是正交矩阵)和一个对角矩阵Λ(Λ=[diag{σ1,σ2…σp}:0],p=min(N,M)),对角矩阵Λ呈降序排列,即σ1≥σ2≥…≥σp≥0,p为矩阵的秩,即 p=rank(A)使得:

其中,对角矩阵Λ的元素为矩阵A的奇异值元素。
将U,V分别表示成列向量和行向量的形式,U=(u1,u2…un),V=(v1,v2…vm)T。A 可以表示成,即A可以表示成一系列的子矩阵与对角矩阵中相应的奇异值相乘得到,奇异值相当于子矩阵的权值,子矩阵仍是N×M型矩阵。
1.3 固有时间尺度分解
固有时间尺度分解(Intrinsic time-scale decom-position,ITD)过程是把信号分解成一系列的固有旋转分量和一个趋势分量。对信号Xt,定义ξ为基线提取因子,使得从信号Xt中抽取一个基线后剩下的余量信号成为一个固有旋转分量。信号Xt的一次分解:

式中 Lt——基线信号,Lt=ξXt;
Ht——固有旋转分量,Ht=(1-ξ)Xt。
假设{τk|K=1,2,…}为信号 Xt的局部极点,定义τ0=0,为简化符号,分别用Xt和Lk表示X(τk)和 L(τk),假设在[0,τk]上定义了 Lt和Ht,且 Xt在 t∈[0,τk+2]有定义,在连续极点间隔(τk,τk+1]上定义分段线性基线提取因子ξ:

式中 β∈(0,1),通常取 0.5。
一次分解得到一个基线信号和一个固有旋转分量,后者表示信号中的局部相对高频成分。然后将基线信号作为新的输入信号继续分解,通过不断重复前面的步骤,直到基线信号变成一个常数函数或单调函数。此时分解将结束,原始信号分解为:

式中 Xt——原始信号;
n——分解层数;
1.4 SVD-ITD方法具体实施步骤
为了演示SVD-ITD方法对磨碎泵电流信号处理的具体步骤,现假定获得离散电机定子电流X{x(n),n=1,2,3,…}信号进行演示。
(1)将信号X以电网工频的周期长度分割成N×M型的矩阵A,其中M表示一个电网工频周期内的离散信号数量,即每一行的离散信号正好是在一个电网工频周期之内,N表示离散电流信号周期个数。
(2)将A矩阵进行SVD分解得到两个酉矩阵U,V,和一个对角矩阵Λ,如式(1)所示。
(3)U,V分别表示成列向量和行向量的形式,U=(u1,u2…un),V=(v1,v2…vm)T则A表示成,其中工频分量 A*=u1σiv1。
(4)用矩阵A减去工频分量A*,即得到剔除工频分量的电流信号At。
(5)对信号 At,用式(2)~(4)进行 ITD分解得到各旋转分量,如式(5)所示,至此SVD-ITD分解全部完成。
2 潜水磨碎泵各堵塞程度试验分析
2.1 潜水磨碎泵结构及试验设计
本文实验泵为GSP-22型潜水磨碎泵,额定功率为P=4 kW,额定电流I=8.2 A额定电压U=380 V。流量Q=20 m3/h,扬程H=10 m,转速n=2 900 r/min。比转速为ns=147.1,叶片数Z=10,结构剖面如图2所示。其工作原理是在叶轮进口处延伸转轴安装动刀盘,在围绕动刀盘的泵体上固定静刀盘,静刀盘在圆周内测有一定数量的半圆形流道,流道的两侧形成两条刀刃。工作时,杂物会被动刀盘甩到磨碎装置的半圆形流道,通过高速旋转的动刀盘与静止的静刀盘配合切割和磨碎,形成很小的固体颗粒,最后通过压水室排出。此次试验通过静刀盘圆周内测不同数量的半圆形流道来模拟不同程度的流道堵塞,如图3所示。
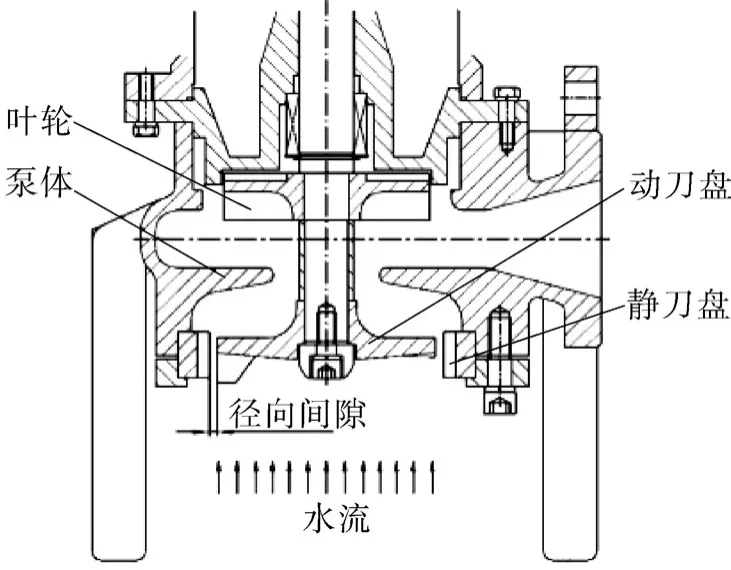
图2 磨碎泵的结构剖面Fig.2 The structural cross-sectional view of the grinding pump
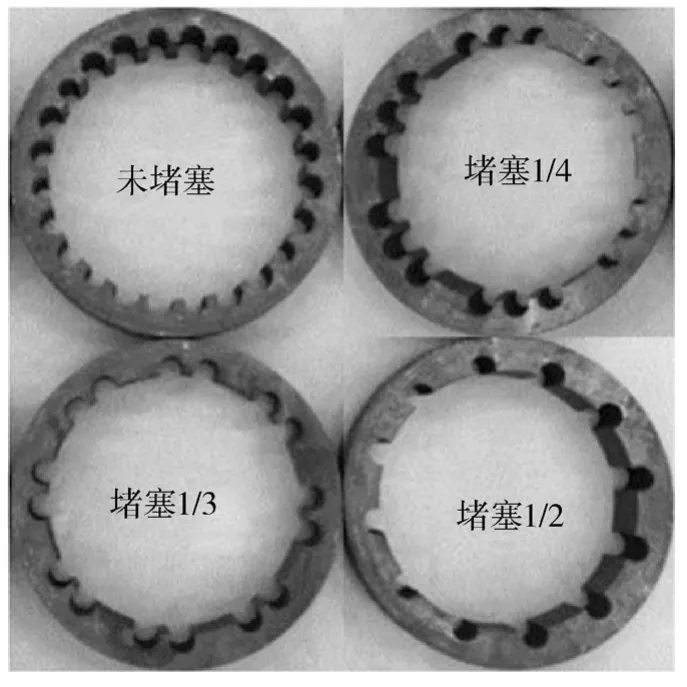
图3 模拟不同堵塞程度下的静刀盘实物Fig.3 The physical picture of the static cutter head simulated under different clogging degrees
泵的整个试验系统由潜水磨碎泵,出水管道,电流互感器,电源箱,流量计等组成,如图4所示。

图4 试验装置示意Fig.4 Schematic diagram of the test device
2.2 电机定子电流采集
由于实际电力系统中连接有许多非线性负载,它们给电网注入各种谐波信号,所以交流信号并非单一的正弦波,而是在基波的基础上含有各次谐波。谐波电流是电流有效值的一部分,因此,在交流采样技术中应考虑谐波分量。根据采样定理,要完整地描述出一个频率为f的正弦波的特征,则对其采样频率至少应达到2 f。同时,采样点数越多,越准确。为了得出不同堵塞程度下对电机定子电流的影响,利用ZH-3111型号电流互感器对电机定子电流采集信号,电流量程为10 A,精度等级为0.5%,采样频率为10 kHz。如图5所示,在时域内,部分定子电流信号的波形在各个堵塞程度下基本一致,难以区分。
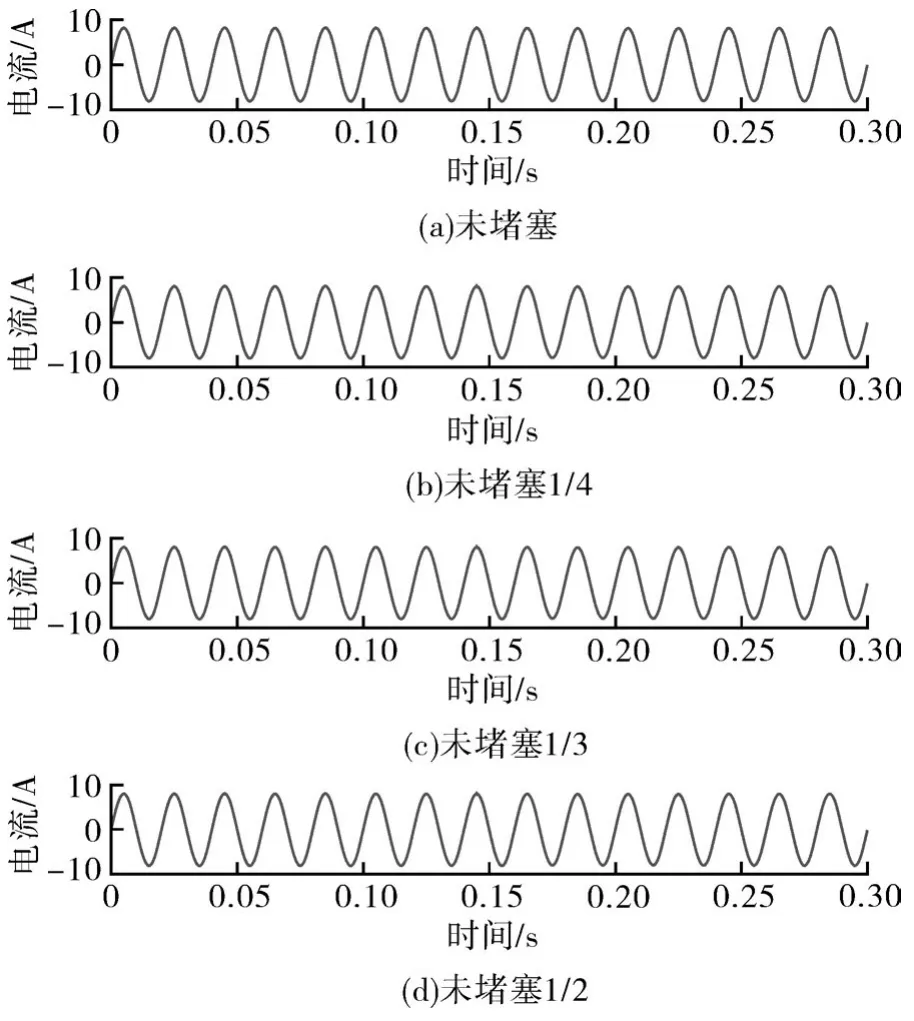
图5 不同流道堵塞程度下的电流波形Fig.5 Current waveforms at different clogging levels of flow channel
通过时域图5可知:幅值一样,趋势一样,无法直接判辨,故需要对此信号进行SVD-ITD处理。
2.3 信号SVD-ITD处理
首先截取0.3 s内的3 000个数据对不同堵塞程度下的电流数据进行SVD处理,得出信号,如图6所示,再通过快速傅里叶变换作出相应的频域图,如图7所示(100 Hz以后的频率几乎为0,不作考虑)。

图6 SVD滤除工频后的时域Fig.6 Time domain diagram after SVD filters out power frequency
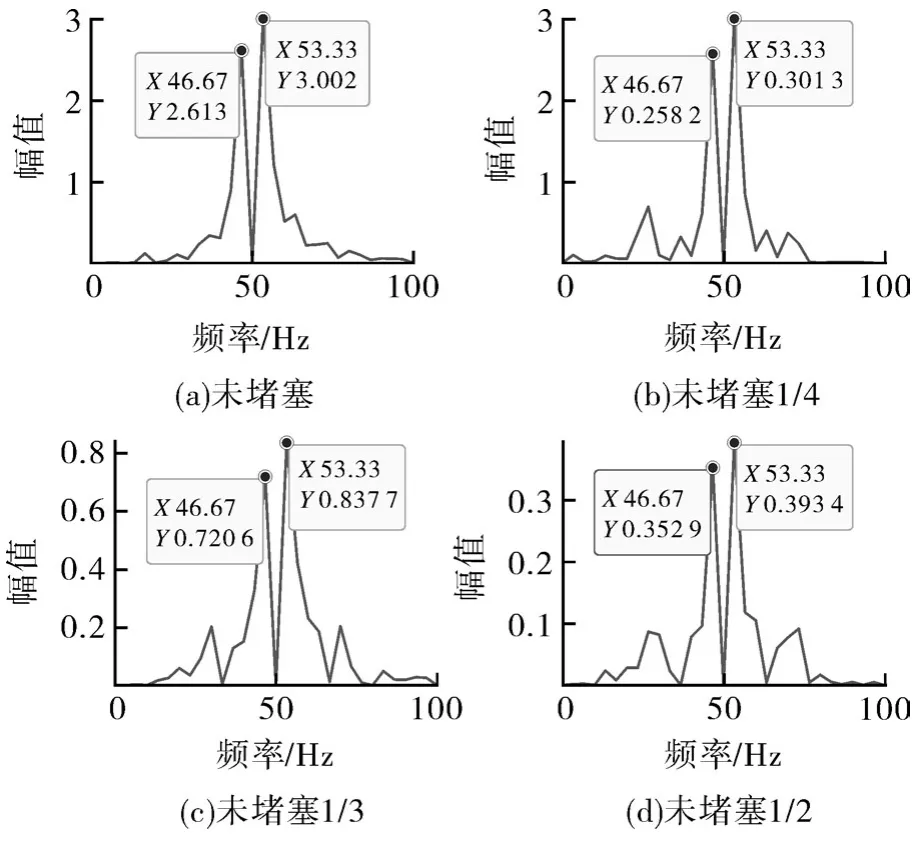
图7 SVD后的频域Fig.7 Frequency domain diagram after SVD
从图7中可以看出,此时工频50 Hz信号已被滤除,经过SVD滤除工频后电流信号的主要的频率相同,都是以46.67 Hz和53.33 Hz为主的调制信号。在0~46.67 Hz以及53.33~100 Hz之内,趋势大致相同,但是也存有一定的差异,这就说明不同的堵塞程度,造就不同频率的故障信号。
对于不同的故障信号,经过SVD还未能完全分辨出来各个故障状态,故对上述经过SVD滤除工频后的电流信号再进行ITD分解,得到若干旋转分量PCRs。然后再对第一、二旋转分量PCR1、PCR2进行快速傅里叶变换得到不同堵塞程度下的频谱图,如图8,9所示。

图8 ITD分解下的PCR1分量频谱Fig.8 PCR1 component spectrum diagram under ITD decomposition

图9 ITD分解下的PCR2分量频谱Fig.9 PCR2 component spectrum diagram under ITD decomposition
由图8可知:在0~1 000 Hz频率的信号相对较弱,1 000 Hz之后的高频信号相对较强且复杂,对堵塞的不同程度分辨较差,主要是由于PCR1旋转分量含有大量的噪声信号。故又对PCR2旋转分量信号进行傅里叶变换。
由图9可知:低频信号相对较强,高频率信号相对较弱。与图7未经ITD分解的频域图相比,明显可知在未堵塞状况下,主要频率一致都为53.33 Hz,而有堵塞的情况下,主要频率却不一致。这是因为磨碎泵在未堵塞情况下运行平稳,电流信号主要由工频信号和调制信号组成,其他频率信号几乎没有。但是经过ITD分解的频域图明显可以看出不同堵塞程度下,其频谱图完全不同。从图中可知不同程度下的频谱图包含各种非正常频率信号,与未堵塞程度频率信号区分明显,3种堵塞程度下的频谱图也各不相同。
为了对比说明ITD分解此类信号的优越性,本文还采用了经验模态分解(EMD)的方法对滤除工频后的信号进行分解,然后对第一,第二分解分量IMF1,IMF2进行频谱分析,如图10,11所示。

图10 EMD分解下的IMF1分量频谱Fig.10 IMF1 component frequency spectrum under EMD decomposition
由图10可知,不同堵塞程度下的频谱图以高频信号为主,未堵塞的频谱相对平缓,主要是因为磨碎泵在未堵塞情况下运行平稳,没有故障信息的注入电流信号。未堵塞与堵塞区分不明显。由图11可知,不同堵塞程度下的频谱图有很大的相似性,其EMD分解下的IMF2分量频率主要分布在500~1 500 Hz之间,说明未堵塞与堵塞状况存在很大混淆。
对比图9,11,ITD分解可以较好区分堵塞与未堵塞,不同堵塞程度的区分也较明显。所以本文确定用SVD-ITD来处理磨碎泵不同堵塞程度下的电流信号。
3 基于支持向量机的堵塞故障识别
为了具体识别潜水磨碎泵不同程度的堵塞故障,本文采用支持向量机构建故障分类模型。对于此种多分类模式识别问题,支持向量机在故障样本有限的情况下分类性能较好。
3.1 特征参数提取
均方根值(RMS)又称作有效值,常用于分析噪声或者定义交流波的有效电压或电流,也可以指示信号发送功率的能力[19-20]。均方根值的计算是将所有值平方求和,求得其平均值后再开平方。计算公式如下:

不同堵塞程度下磨碎泵的功率有所差异,这种差异会反映在电流信号中,而均方根值可以将这种差异的有效值提取出来。通过前面的分析可知,电流信号经过SVD-ITD分解得到第二旋转分量能较大程度的区分各堵塞程度。但只通过第二旋转分量的均方根值进行故障识别难免会遗漏额外故障信息,因此,为了全面提取故障特征信息,本文通过计算多个旋转分量的均方根值构造特征向量,完成对各堵塞程度的特征值提取。部分数据见表1所示。
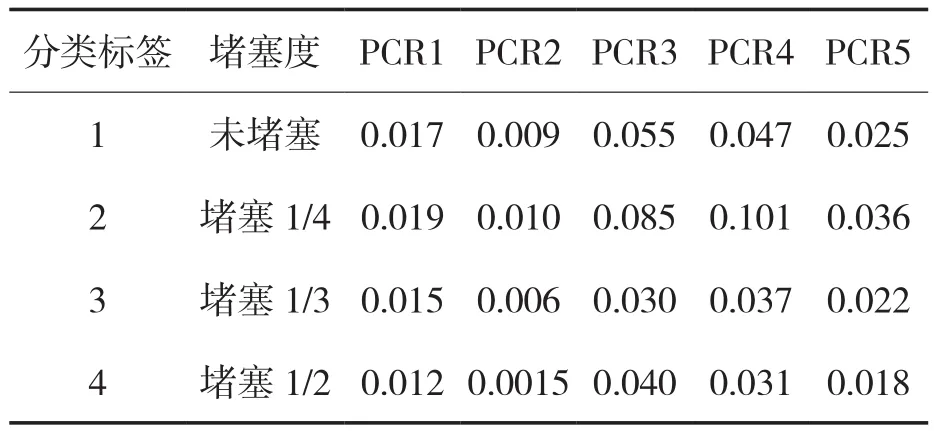
表1 测试数据Tab.1 Test data
3.2 模型训练
样本构建时,未堵塞,堵塞1/4,堵塞1/3,堵塞1/2 分别对应 1,2,3,4 四种标签,见表 1。每种标签下分别采集60组数据作为训练集,26组数据作为测试集。支持向量机做分类预测时需要调节惩罚参数g和核函数参数C才能得到比较理想的预测分类准确率。为了得到较满意的分类结果,本文采用粒子群算法进行参数优化。整个故障分类器算法流程如图12所示。

图12 支持向量机建模流程Fig.12 Support vector machine modeling process
3.3 结果分析
故障分类结果如图13所示。

图13 故障分类显示Fig.13 Fault classification display
由图13(a)可以看出,通过支持向量机训练过后的模型有93.7%的适应度,惩罚参数g和核函数参数C分别是10.092 9,6.321 1。该模型经过大约10次的迭代次数就趋于收敛,收敛速度较快。测试集结果如图13(b)所示,在该混淆矩阵测试的样本中,只有8个出现误判,准确率为92.3%,故障识别结果较为满意。
4 结论
(1)在不同堵塞程度下,电流原始数据不能直接作为区分指标。主要是由于原始数据中工频分量占比较大,导致各堵塞情况区分度不高。对原始数据进行SVD分解,滤除工频分量,可以得到包含有效故障信息的微小信号。
(2)对滤除工频分量的微小信号进行ITD分解,得到若干旋转分量PCRs,可以作为不同堵塞情况下的故障特征信号。其中,对包含故障信息的第二旋转分量PCR2做频谱图可以明显区分堵塞和未堵塞,也可以明显区分各个堵塞状况。
(3)将各旋转分量的RMS值作为特征向量,输入到支持向量机构建故障分类模型。结果显示,该故障分类模型有较快的收敛速度和较高的准确率。
