模糊代数PID控制在污水处理溶解氧控制系统的应用
2021-11-26曾春霞董宗哲
曾春霞 董宗哲 何 涛
(湖南化工职业技术学院)
在污水生化处理过程中,曝气是非常重要的一个环节。 曝气处理对氧含量的要求十分苛刻:氧含量过低会降低好氧微生物的活性,影响污水处理的效率;氧含量过高会增加能源消耗,加大运行成本[1],同时也会导致微生物过氧化,加速有机物分解, 使微生物因缺乏营养来源而降低活性。 针对溶解氧(DO)浓度控制平稳性差、处理效率低的问题,学者们提出了各种控制方法,如神经网络控制、改进型内模控制及遗传算法等[1~6],这些算法能达到很好的控制效果, 但由于控制系统复杂,难以在PLC控制器上实现。 黄超等提出了一种基于双模糊控制算法的溶解氧控制方案[7],与单模糊控制相比,该方法控制精度高,但成本也高。文献[8]将模糊代数应用于污水处理溶解氧浓度控制中,使用了合适的模糊规则,解决模糊控制中的静态稳定性与动态可调之间的矛盾, 使得该控制器比传统的PID控制器在静态特性和动态特性上表现更优异。笔者将模糊代数控制与传统PID控制相结合, 提出基于模糊代数PID的控制策略,并将之应用到化工污水处理曝气系统中。
1 溶解氧控制方案设计
1.1 曝气系统
污水处理的曝气装置采用鼓风曝气装置,如图1所示,它主要由鼓风机、曝气池、空气扩散装置和装置联通管道组成[9],通过鼓风机将空气引入到曝气池底部的空气扩散设备,用微小气泡把空气融入污水,从而使活性污泥、有机污染物和氧气三者充分接触、反应。
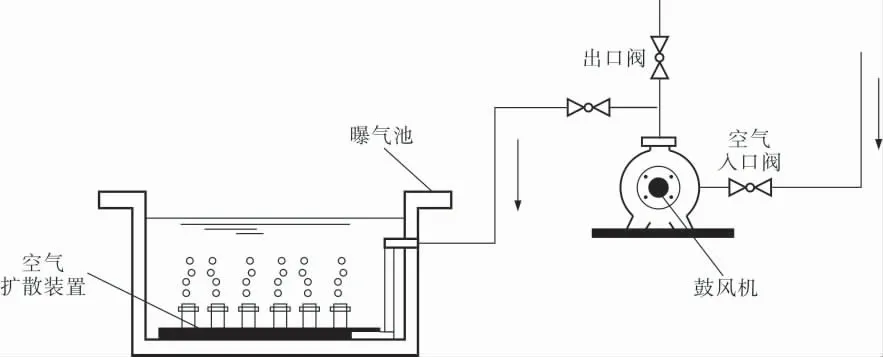
图1 鼓风曝气装置结构示意图
1.2 溶解氧控制系统
溶解氧控制系统分为3层, 分别为工业现场层、实时监控层和远程服务器层,系统总体结构如图2所示。
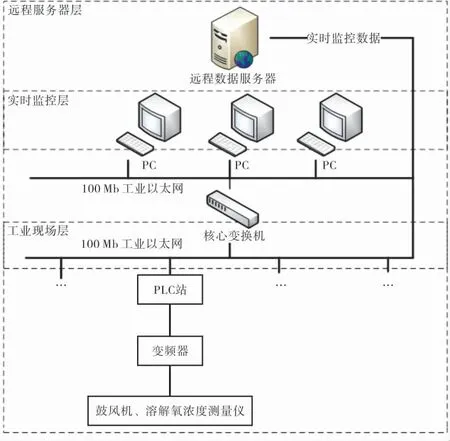
图2 溶解氧控制系统结构
工业现场层由PLC站、变频器、鼓风机和溶解氧浓度测量仪组成,负责采集溶解氧浓度和控制鼓风机送风量[10]。 在送风管道中安装空气流量计、压力计和温度计,根据理论需氧量在曝气池中布置溶解氧测量仪,多台鼓风机并联,鼓风机出口连接到主送风管道中,每台鼓风机均配备变频器,可依据需氧量向曝气池内供气,从而实现节能效果。 实时监控层基于Windows系统进行软件开发,实现模糊代数PID控制算法、数据实时显示、报警及人工调整参数等功能。 远程服务器层用于存储实时数据和历史数据,提供外网接入接口,专家或工程师可以通过多种终端连接数据库查看数据,进行监控和评估。
2 溶解氧浓度模糊代数PID控制器的设计
2.1 模糊代数控制器简介
模糊代数是模糊逻辑和模糊推理的基础代数结构。 将语言变量X的每个术语域都看作是模糊代数,且有AX=(X,G,C,H,≤),其中是X的X术语集;≤代表X中的顺序关系。 G={c-,c+}是术语集,满足c-≤c+,c-是具有削弱作用的基本术语,c+是具有加强作用的基本术语, 例如:c-=Small,c+=Big。 C=(0,W,1)是常量集,满足0≤c-≤W≤c+≤1,0和1分别是X中的最小项和最大项,W是中间项。 模糊操作H=H-∪H+,其中H-={hj:-1≤j≤-q}是削弱模糊操作的集合,h∈H且满足hc+≤c+(写成sign(h)=-1),而H+={hj:1≤j≤p}是增强模糊操作的集合,且满足hc+≥c+(写成sign(h)=+1)。 例如:H-={Rather,Little},H+={Very,Extremely}。 由于hj是一元操作, 所以除常量外,AX的每个术语都是hnhn-1…h1c,c∈G的形式。 根据模糊代数,可以找出很多有关固有语义属性的原则,尤其在AX中存在模糊操作的情况下。例如:对于每一个x∈X,k、h∈H,hx和x都是可以比较的。 如果hx≤x,则当sign(k,h)=1时,有khx≤hx≤x,当sign(k,h)=-1时,有hx≤khx≤x[8,11]。
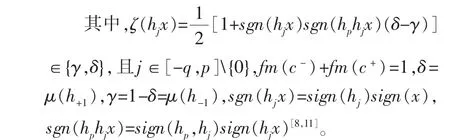
在术语语义的代数方法中,可得到AX的相关语义结构,其表示集合H(x)={x=hnhn-1…h1c:c∈G,hj∈H}能被看成是x(x∈X)的模糊模型。整个集合H(x)给出了一个模糊测度fm,它等同于H(x)的“直径”,并且可以根据给出的模糊测度初始项fm(c-)和fm(c+)计算得到;μ(h)是模糊操作h∈H的模糊测度,也是X的模糊参数,且:

根据语义量化映射值νfm, 定义了X的模糊测度fm,也可以根据给定的模糊参数值计算出fm的值,即:

模糊代数控制器原理如图3所示。 其中,规范化是指将输入转换到区间[0,1]中,再根据模糊测度定义语义量化映射值(SQMs),而反规范化是其逆变换。 量化规则库是指将模糊控制中的模糊术语完全转换成模糊代数术语规则库,再使用相关变量的语义量化映射值将规则库转换成欧几里得空间中的一个曲面Sreal。

图3 模糊代数控制器原理框图
2.2 溶解氧系统模型建立
在实际检测中,溶解氧浓度呈非线性,具有较强的滞后性,系统模型的传递函数为:

其中,Kc为稳态增益,T0为时间常数,τ为滞后时间。
基于MATLAB系统辨识工具箱来进行预估模型的参数辨识。 在环境温度为18 ℃的情况下,每隔5 s对污水生化处理池进行采样。采集到的溶解氧的数据导入到系统辨识图形界面窗口,对数据进行预处理和模型估算。 通过系统辨识,得到稳态增益为7.812 5,时间常数为72 s,滞后时间为10 s,因而本系统溶解氧预估模型的传递函数为:

2.3 溶解氧浓度模糊代数PID控制方案
模糊代数PID控制器从本质上说是一个具有可变比例、积分、微分参数的PID控制器,在此基础上加入了模糊代数的作用,保留了模糊术语本来的内部关系,改善了系统的性能。
溶解氧模糊代数PID控制方案的原理如图4所示,模糊代数PID控制器的输入是误差e和误差变化率ec,其中,误差e是每个采样周期中的传感器检测到的实时溶解氧浓度值和溶解氧浓度设定值之间的偏差。 得到误差e和误差变化率ec后,结合模糊控制和模糊代数理论进行模糊推理,通过推理计算可以得到相应的PID整定参数, 并以此为依据计算出PID控制器的3个参数Kp、Ki、Kd, 从而实现PID调节。
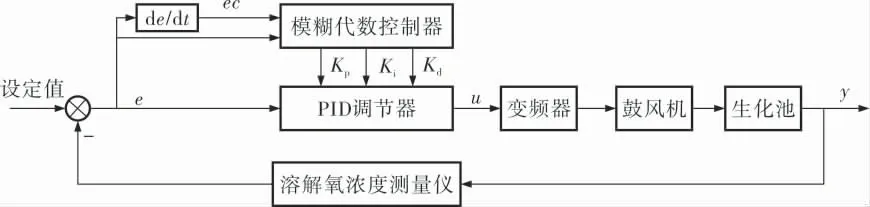
图4 模糊代数PID控制方案原理框图
2.4 溶解氧浓度模糊代数PID控制器设计
2.4.1 确定模糊代数语言变量
模糊代数控制器有两个语言输入:Le和Lec,二者分别对应变量误差e和误差变化率ec;一个语言输出Lu,对应变量u[8]。 Le、Lec和Lu语言变量的对应关系见表1。

表1 Le、Lec和Lu语言变量的对应关系
在污水处理系统中,通过传感器检测到的溶解氧浓度与设定的溶解氧浓度值之间的误差e一般在[-0.6,0.6]之间,将其乘以比例因子10后偏差值的取值范围是[-6,6],也就是输入量e和ec的论域为[-6,6],其输出量的论域也为[-6,6]。 模糊代数为AX=(X,G,C,H,≤), 其中G={Small,Big}, 也可写成G={S,B};C={0,W,1};H-={Little}={h-1},H+={Very}={h+1}。 同时得到p=1,q=1。
Le、Lec和Lu的参数值见表2[8]。
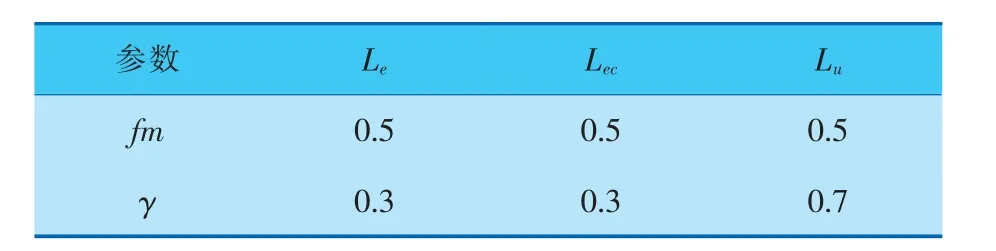
表2 变量Le、Lec和Lu的参数值
2.4.2 建立模糊代数控制规则,并确定语言变量的数值
总结技术人员在实际操作过程中的经验,根据模糊代数控制器的转换规则, 得到ΔKp、ΔKi和ΔKd的模糊代数控制规则表[8,11](表3)。 然后根据Le、Lec和Lu这3个变量的参数值,由式(1)、(2)计算出每一个语言变量的νfm值,得到对应的模糊代数语义量化映射值(表3)。
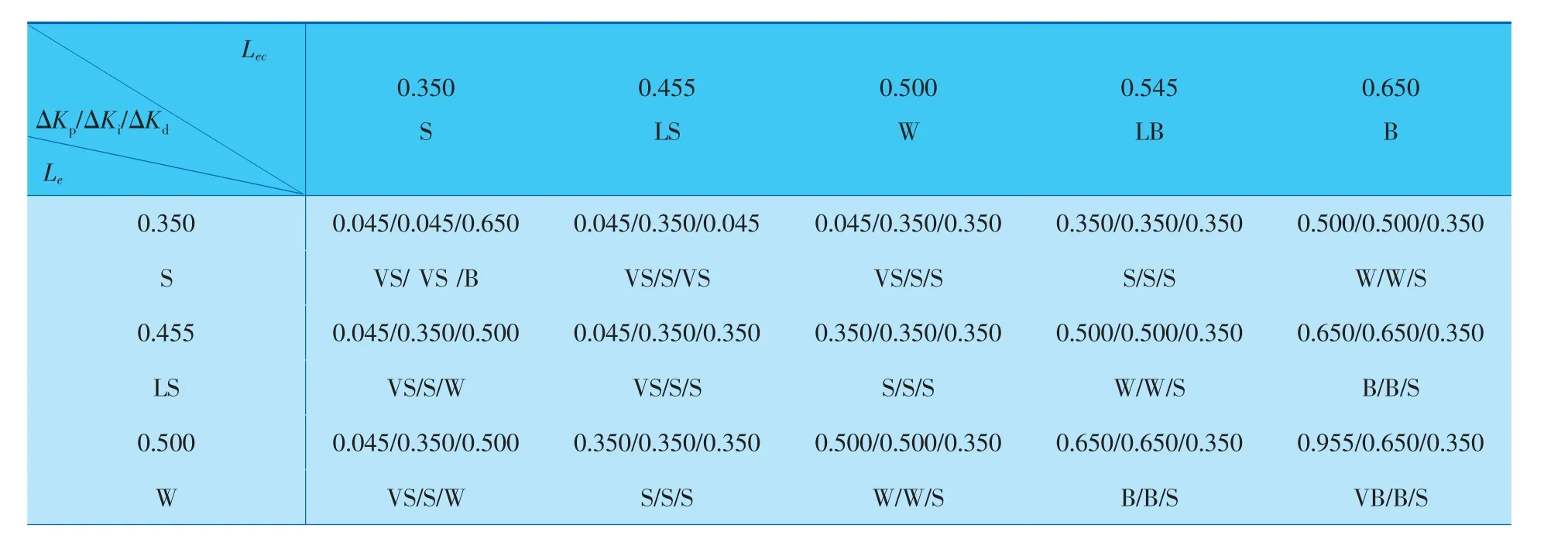
表3 ΔKp、ΔKi和ΔKd模糊代数规则表及语言变量νfm值

(续表3)
2.4.3 确定曲面Sreal的数学模型
采用模糊代数插值推理方法得到曲面Sreal,如图5所示。
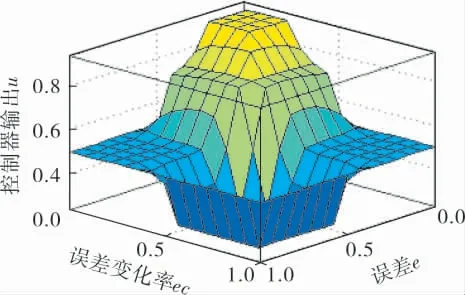
图5 模糊代数控制的曲面Sreal
3 溶解氧浓度模糊代数PID控制仿真
3.1 控制器的搭建
为方便对比,在MATLAB的Simulink中分别搭建了溶解氧浓度模糊代数PID控制、模糊PID控制和PID控制仿真结构图,如图6~8所示。
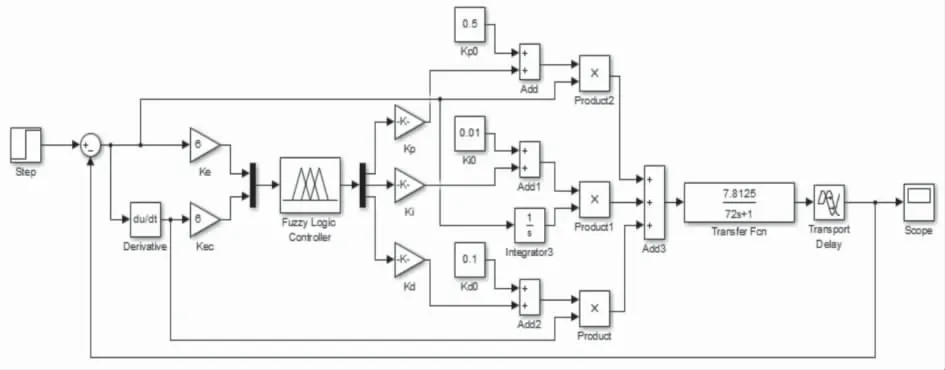
图6 溶解氧浓度模糊代数PID控制系统仿真结构
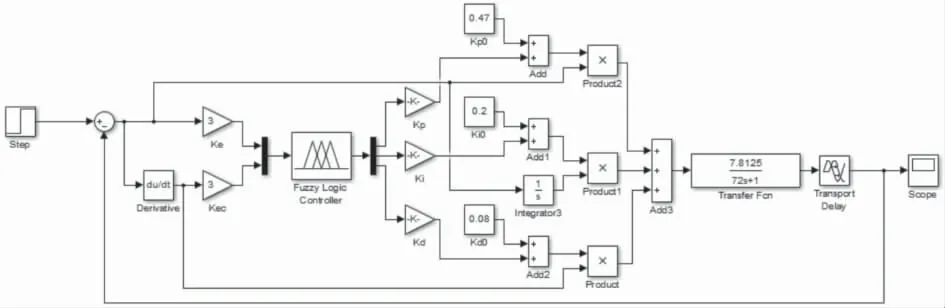
图7 溶解氧浓度模糊PID控制系统仿真结构

图8 溶解氧浓度PID控制系统仿真结构
3.2 控制仿真
3.2.1 模型匹配
当模型匹配时,模糊代数PID控制、模糊PID控制和PID控制的仿真结果如图9所示,性能指标对比见表4。
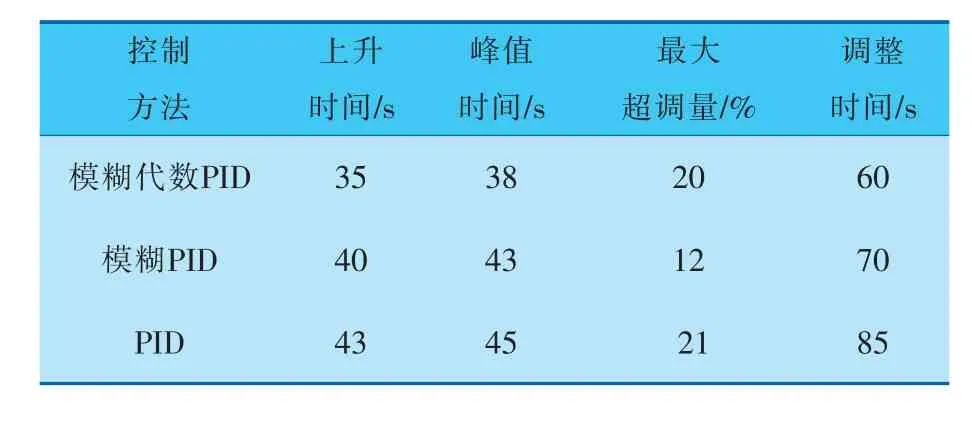
表4 模型匹配时模糊代数PID、模糊PID与PID控制器性能对比

图9 模糊代数PID、模糊PID和PID控制器仿真结果对比
由图9和表4可知,相比PID控制器,模糊代数PID控制器的输出波形更好,其响应速度快,超调量小,调整时间短;相比模糊PID控制器,模糊代数PID控制器的响应速度快,调整时间短,虽然超调量比模糊PID控制的大,但是仅仅超出了一点,在系统允许范围内。
3.2.2 加扰动
150 s时, 把幅值为0.5 mg/L的干扰信号加入系统,模糊代数PID控制、模糊PID控制和PID控制的仿真结果如图10所示,性能指标对比见表5。

图10 加扰动时模糊代数PID、模糊PID和PID控制器仿真结果对比
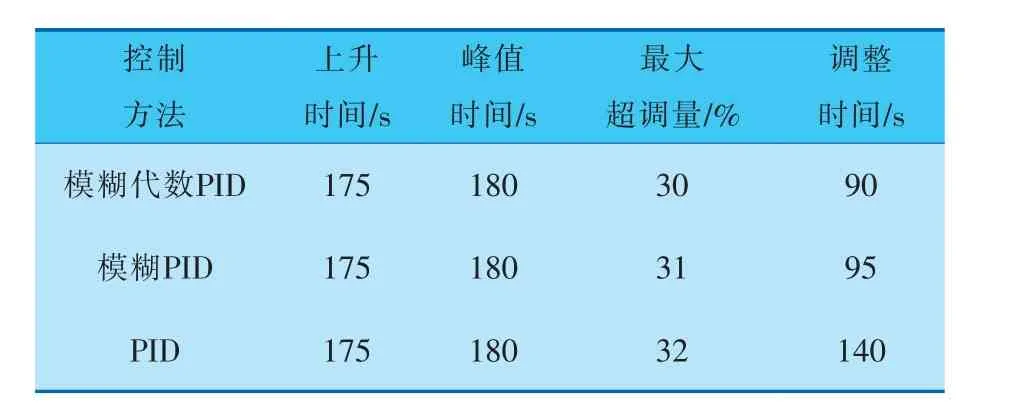
表5 加扰动时模糊代数PID、模糊PID与PID控制器性能对比
由图10和表5可知,模糊代数PID控制器具有良好的鲁棒性,当出现干扰信号时,能较快地进行控制从而达到了系统的控制目标。
3.2.3 模型参数变化
将溶解氧预估模型中的参数进行调整,即Kc值变为6.812 5、T0值变为82,τ值变为12 s,则溶解氧预估模型的传递函数为:

模糊代数PID控制、 模糊PID控制和PID控制的仿真结果如图11所示,性能指标对比见表6。
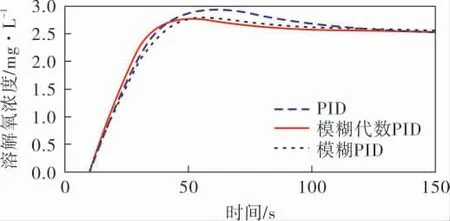
图11 模型参数变化时3种控制器仿真结果对比
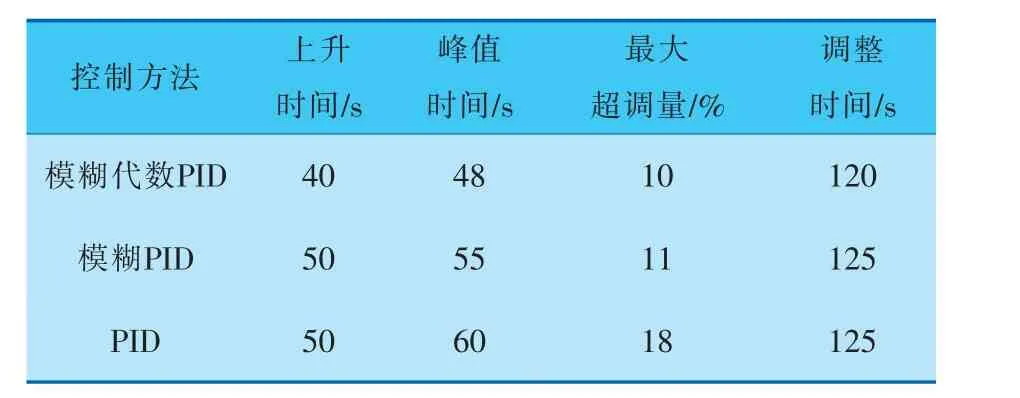
表6 模型参数变化时模糊代数PID、模糊PID与PID控制器性能对比
由图11和表6可知, 当改变溶解氧预估模型中的参数时, 模糊代数PID控制器同样具有较好的性能,其响应速度更快,超调量较小。
4 实际运行结果
图12显示了应用模糊代数PID控制器的溶解氧实时浓度。溶解氧浓度要求控制在2~3 mg/L,当调节时间为83.6 s时, 溶解氧实际浓度达到了工艺要求;当调节时间为102.8 s时,溶解氧浓度稳定在2.532 mg/L附近。
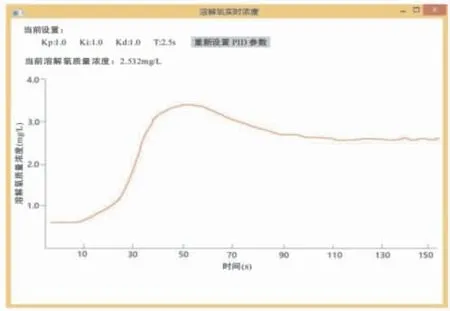
图12 溶解氧浓度实时数据界面
5 结束语
针对化工污水处理曝气系统的非线性、时变及难以得到精确数学模型等特点,设计了模糊代数PID控制器, 并应用于化工污水处理溶解氧浓度控制中。 仿真和应用结果表明:该控制器结合了传统PID控制、模糊控制和模糊代数的优点,具有快速性和抗干扰性,污水处理效果好。
