Design of a Submarine Pipeline Inspection Robot System Based on CT Technology
2021-11-26XuDongWenyuZhangYishunLiWeiLiuLiYang
Xu Dong Wenyu Zhang Yishun Li Wei Liu Li Yang
1.Beijing Research institute of Mechanical & Electrical Technology, Beijing, 100074, China
2.Liaoning Vocational Technical College of Modern Service, Shenyang, Liaoning, 110000, China
3.Beijing Oil and Gas Transportation Branch of National Pipe Network Group North Pipeline Co., Ltd.Beijing, 102488, China
ABSTRACT With the rapid development of submarine oil and gas, the security issues of submarine oil and gas pipeline become increasingly prominent, and regular inspection of submarine pipeline is particularly important.Therefore, a submarine pipeline inspection robot system based on CT technology to solve the problems such as low traditional manual inspection efficiency, high labor cost, low security and backward inspection methods.Based on the platform of ROV robot, carrying CT scanner as an external detection device, the system is used for non-invasive inspection of submarine pipeline, which is safe and harmless, with good economy, high mobility, and strong environmental adaptability.Compared with traditional technology, CT scanner’s external inspection technology used in the system avoids the damage to the external protective layer of the pipeline in the measurement of pipeline wall thickness.Meantime, it can provide the tomography of the pipe wall and the composition of the sediment material on the inside wall, which fills the gap in this technical field in China.According to the test, the robot has the characteristics of stable adsorption, flexible movement, and clear pipeline CT scanning image, and can realize the intelligent inspection of submarine pipeline.
Keywords:Submarine oil and gas pipeline ROV robot CT technology Non-invasive inspection
1.Introduction
In recent decades, with the rapid development of offshore oil and natural gas by countries all over the world, submarine oil and gas pipeline has become the safest, fastest, most reliable and most economical method to continuously transport a large quantity of oil and natural gas.It plays an important role in the transportation of offshore oil and natural gas, considered as the lifeline of offshore oil and gas transportation engineering.Since the first submarine oil and gas pipeline was built by Brown & Root (an American ocean engineering corporation) in the Gulf of Mexico in 1954, a huge submarine oil and gas pipeline network has been formed in various sea areas worldwide[1].In 1985, the first submarine oil pipeline was laid in Chengbei oilfield, Bohai Sea[2].Up to now, the total length of submarine pipelines laid in different sea areas in China has exceeded 6,000 km.
Due to complex marine environment, oil and gas transmission pipeline is affected by natural factors such as geological changes, medium corrosion and ocean current impact for a long time, or damaged by artificial factors such as sand mining and anchor, so the pipeline is prone to corrosion, cracks and other problems[3-5].If these problems cannot be found in time, oil and gas leakage accidents caused by the damage to oil and gas pipelines will directly lead to shutdown of oil and gas fields, and even explosion due to leakage of crude oil or natural gas, resulting in heavy casualties and huge economic losses, and seriously destroying the surrounding ecological environment[6,7].In 2007, the crude oil pipeline in Weizhou Island, South China Sea leaked due to corrosion, resulting in the shutdown of Weizhou oilfield for nearly 200 days[8].In 2011, due to illegal operation of sand mining ship near CNOOC (Hengqin, Zhuhai) natural gas, CNOOC natural gas pipeline was mechanically damaged and broken[9], resulting in a serious leakage accident.In recent years, as submarine pipeline is continuously built and submarine pipeline accidents gradually increase, the safety protection of submarine pipeline has become increasingly important, and the regular inspection of submarine pipeline has become an increasing concern.It is an important way to ensure the normal and safe operation of submarine pipeline to regularly inspect, accurately locate and find the damage and failure of pipelines.
The traditional method of divers inspecting pipeline by handheld device has the characteristics of low efficiency, high labor cost and low safety.When the development of China’s marine oil and gas resources gradually extends from shallow water area (Bohai Sea area) to deep water area (Yellow Sea and South China Sea areas), it is much more difficult to lay, install, inspect and maintain oil and gas facilities and to work underwater for divers, and the risk of operation by personnel become higher[10].Furthermore, the traditional inspection methods are no longer suitable for the current inspection scenario, so it is very important to design and produce an intelligent robot that can replace divers for underwater inspection.
At present, the inspection method of submarine oil pipeline is mainly internal inspection, using technologies such as magnetic flux leakage[11,12], ultrasonic[13], electromagnetic wave[14]and eddy current[15,16], but these technologies can only be used on land, that is, internal inspection cannot be conducted after the pipeline is laid underwater.Therefore, it is urgently needed to solve the technical problem of external inspection of pipeline.
Based on the necessity of submarine pipeline inspection and our previous research on submarine robot and external pipeline inspection technology, a non-invasive submarine pipeline inspection robot based on CT technology is designed.Through the overwater control system, we remotely monitor and control the ROV robot platform, carry and place the CT scanner to the submarine pipeline, complete the independent inspection of the submarine pipeline, and feed back the relevant data, images and processing results in real time.Compared with the traditional inspection technology, CT scanner avoids the damage to the external protective layer of the pipeline in the measurement of pipeline wall thickness.Meantime, it can provide the CT scan of the pipeline wall and the composition of sediment on the inside wall.This is a breakthrough in domestic non-invasive inspection technology.
2.Design of Submarine Pipeline Inspection Robot System
2.1 System Introduction
The submarine pipeline inspection robot system () is mainly composed of submarine pipeline inspection robot platform, platform load (CT scanner, Tanker, etc.) and overwater control system.The platform load is carried by the submarine pipeline inspection robot platform.The signal interaction and energy supply between the overwater control system and the underwater robot are realized through wire transmission.
2.2 Design of Control System for Submarine Pipeline Inspection Robot
The function of the control system is to sense the external information through the sensor and analyze, judge and process the information, send control commands through the output interface, coordinate the work of each subsystem, control the rotational speed and direction of the thruster, and display the status of each system.The control system can precisely control the underwater robot in water, including fixed depth navigation, fixed speed navigation, directional navigation, positioning hovering, and crawler traveling under the interference of complex ocean current.
2.2.1 Composition of Control System
The control system of submarine pipeline inspection robot (Figure 2) is composed of computer, RS485 bus, thruster, relevant sensors, power supply unit, image acquisition and lighting unit.Among them, the underwater thruster is controlled by PWM signal sent by ARM integrated control computer, and the other unit equipment is controlled by RS485 communication bus.
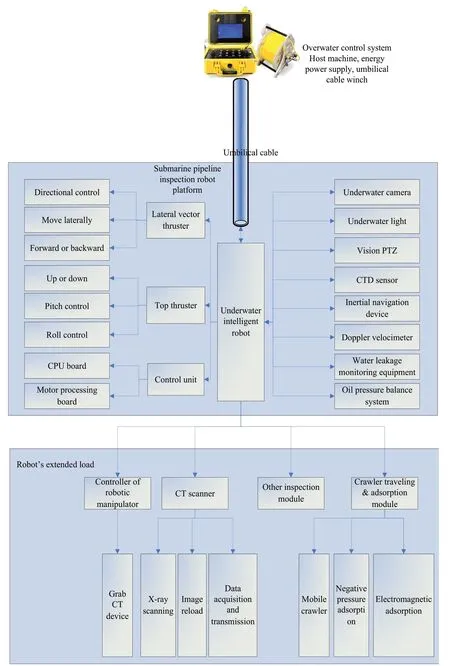
Figure 1.Block Diagram of Robot System
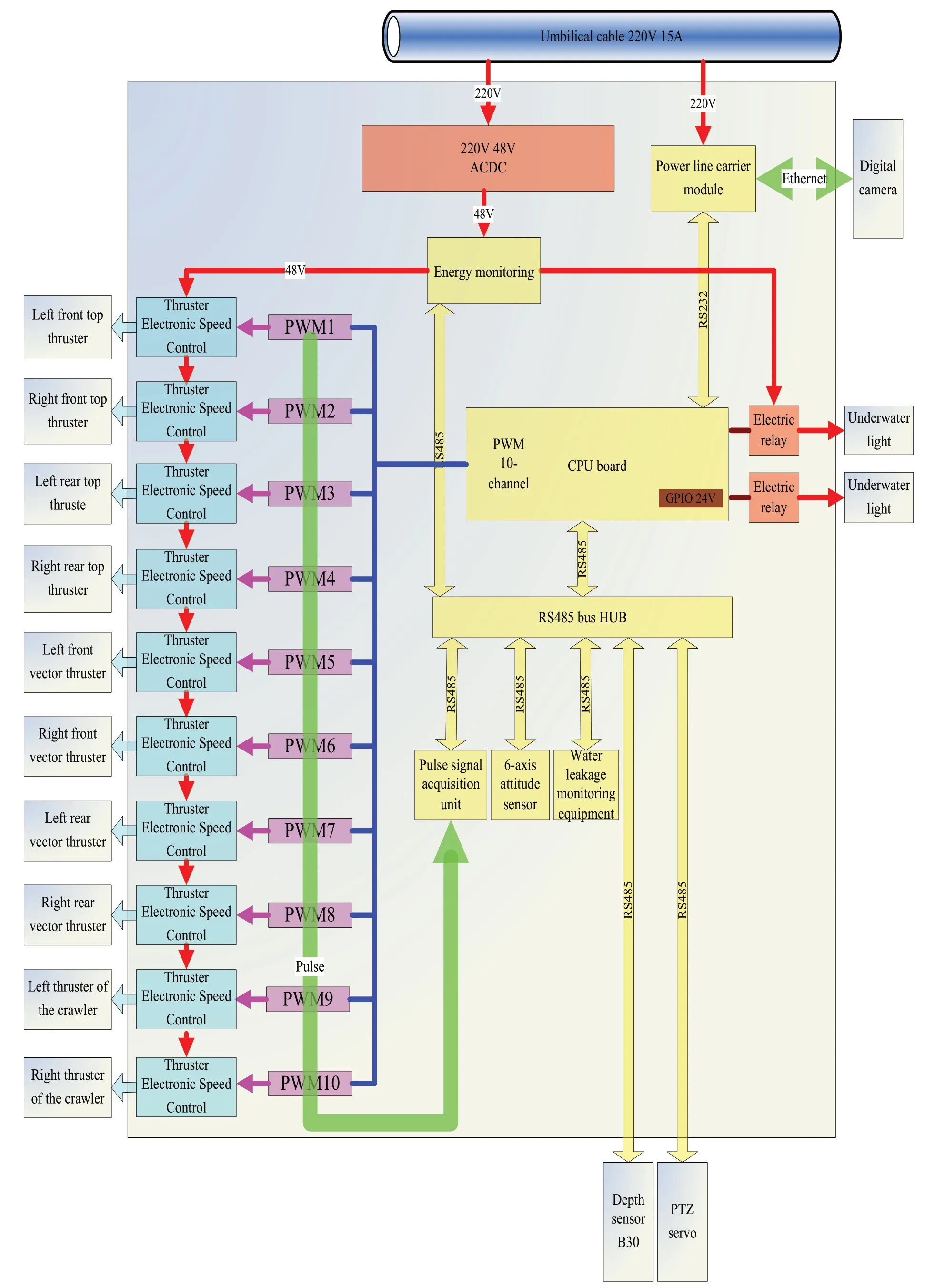
Figure 2.Composition of Control System of Submarine Pipeline Inspection Robot
2.2.2 Principle of Control System
And now she told him all that we alreadyknow about the tree- the old mansion, the pedlar and the goose-girlwho had met there for the first time, and had become the ancestorsof the noble family to which the young lady belonged
The function of the underwater robot control system is to send PWM signals through the integrated control computer to control the rotation direction and speed of 8 thrusters.The external information is sensed by the sensor unit and encapsulated into 485 bus communication format to form a control feedback signal.The integrated control computer analyzes, judges and processes the control feedback signal, and modifies the control law, to make the whole underwater robot move towards the expected direction and speed.The installation position of thrusters on the robot platform is shown in Figure 3, with a total of 8 thrusters, including 4 vertical thrusters on the top and 4 vector thrusters in the transverse direction.Some or all of vertical and vector thrusters work with one another to complete the 6-DOF motion of the robot.
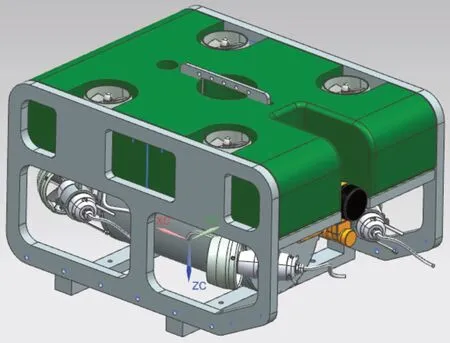
Figure 3.Position of the Thruster Installed in the Underwater Robot
2.3 Design of Non-invasive Submarine Pipeline Inspection System
2.3.1 CT Scanner
The inspection technology of submarine pipeline is mainly used to determine the change of pipeline wall thickness, and the influencing factors mainly include hydrates, wax precipitation, gravels or asphaltene[17].We mainly adopt the non-invasive submarine pipeline inspection technology — CT scanning technology, which can detect the changes in the wall thickness of different types of pipelines such as riser pipe, insulating pipe and pipe bundle without interrupting the normal operation and production of oil and gas pipeline[18,19], and can also detect the state and relevant parameters of flowing substances such as wax, asphaltene and hydrates[20]inside the pipeline.
The CT scanner designed and manufactured (Figure 4) is composed of the mechanical structure, computer system and CT scanning system.

Figure 4.CT Scanner for Submarine Pipeline
(1) Mechanical structure
Support frame: during operation, it can be wrapped and fixed at the periphery of submarine pipeline to provide support for equipment moving on the pipeline.
ROV connection structure: extend out the robotic manipulator to move and grab the inspection equipment.
(2) CT scanning system
Ray: X-ray
Detector: scintillator photoelectric diode detector is used, with high geometric efficiency.
Power unit for the scanning system: mainly consist of mechanical drive shaft, encoder, motor, shift control board, servo amplifier, etc.
(3) Computer system
Data acquisition and transmission system: connect with overwater analysis system to realize data interaction and transmission.
Image reconstruction and analysis system (Figure 5): mainly consist of system motherboard, special control board, display, array processor, copying machine, etc.It is used to complete synchronous acquisition of CT data and image reconstruction.
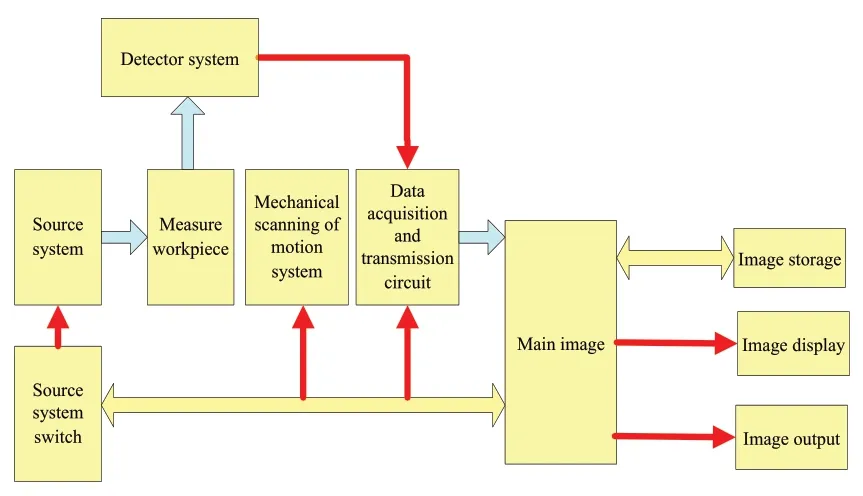
Figure 5.Image Reconstruction and Analysis System
2.3.2 Pipeline Inspection Principle
The submarine pipeline scanner adopts the CT principle (Figure 6), uses precisely collimated X-rays and highly sensitive detectors to rotate around the submarine pipeline for continuous section scanning, and realizes 360° rapid scanning imaging.Pipeline inspection adopts the fifth generation of CT scanning technology, namely multi-source multi-detector scanning technology[18].The radiation source and detector are distributed at an angle of 120 degrees.The oil pipeline is in a static state during the inspection, and the radiation source and detector move rapidly along the axial direction of the pipeline.
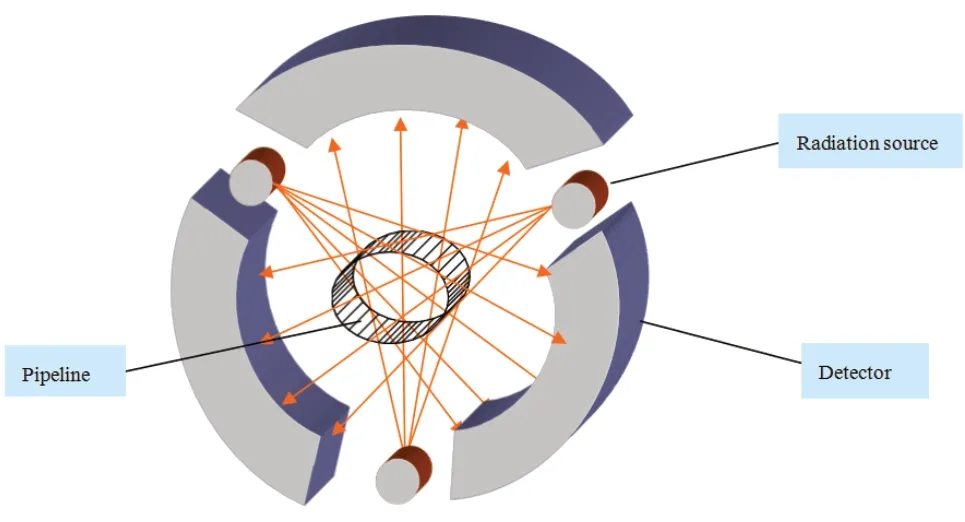
Figure 6.CT scanning schematic diagram of pipeline
2.4 Design of Underwater Negative Pressure Structure
When the working surface of the submarine pipeline inspection robot is not magnetic material, and the magnetic adsorption does not exist, the robot attracts onto the working surface by thrusters.Negative pressure adsorption (Figure 7) is mainly completed by four top thrusters in the floating body of the underwater robot.The thrusters rotate in the adsorption mechanism, and the sealing strip slows down the inlet water velocity, thus forming a throttle mechanism.During operation, due to the water absorption of the thruster, a pressure difference is formed inside and outside, and the internal pressure is less than the external pressure, thus making the robot attach onto the surface.The adsorption force depends on some factors such as the rotational speed of the thruster, and the distance between the sealing strip and the wall.The rotational speed of the thruster can produce the propulsive force towards the surface.Meantime, the higher the rotational speed, the greater the flow of discharged water, the greater the internal and external pressure difference, and the stronger the adsorption force.
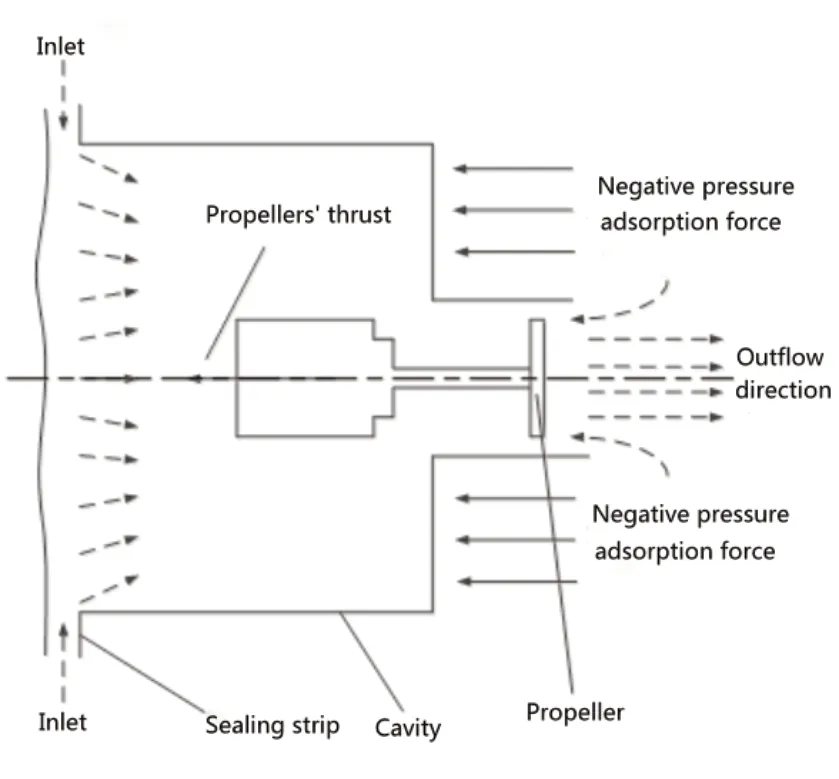
Figure 7.Principle of negative pressure generated by rotation of thrusters
2.5 Design of Underwater Magnetic Adsorption Structure
Magnetic adsorption is mainly to install the third generation of rare earth NdFeB N45 permanent magnet in the robot’s crawler (Figure 8 and Figure 9).It adopts the design of type B magnetic circuit.Its magnetic circuit structure has small magnetic resistance, small magnetic leakage and stronger adsorption, so as to ensure the stable adsorption of magnetic blocks on the hull surface.During the moving process, to ensure on damage to the magnet damaged during repeated attraction to and separation from the hull, neoprene blocks are installed on the side surface of the magnetic circuit device to protect the magnet structure, increase the sliding friction coefficient and prevent skidding.

Figure 8.Schematic diagram of underwater intelligent robot platform attracting onto adsorbale tank
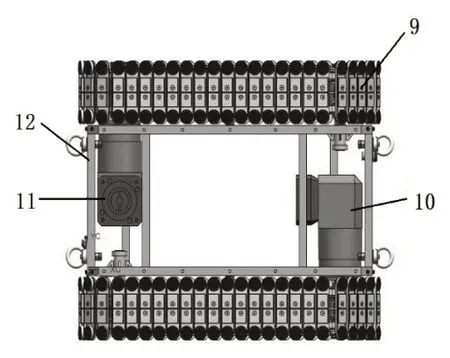
Figure 9.Top View of the Structure of Underwater Intelligent Robot Platform Attracting onto Mobile Crawler 1.Adsorption unit 2.Tension mechanism 3.Chain 4.Driving shaft 5.Driving wheel 6.Support structure 7.Driven shaft 8.Driven wheel 9.Crawler 10.Motor and deceleration structure 11.Fixed block 12.Left and right connecting plates

3.Experiment and Data Analysis
The upper right part of the control interface of the robot’s upper computer (Figure 10) is the display area of various status information of the underwater robot (including CT equipment status, ROV operation status, lighting status, image status, etc.), you can click the button control to set some parameters such as the data saving, saving path, saving data start and stop, and communication rate.The lower right part of the control interface is the thruster control area.You can select different operation status, and then drag the progress bar to set the input power of each thruster.

Figure 10.Overwater Control Interface
The upper left part of the control interface is the realtime data recording and saving status of the picture taken by the underwater camera, and information collected by serial communication rocker and displayed in the humancomputer interaction interface of the upper computer, and video can be recorded.The lower left part is the overwater analysis system area of CT scanning equipment, which can monitor the pipeline status in real time, store the scanned image in real time and make a judgment.During the inspection and scanning of submarine pipeline, the robot grabs the CT scanner (Figure 11) and places it at the pre-excavated exposed submarine pipeline, the support structure wraps the submarine pipeline, the scanning system starts to scan and inspect the oil and gas pipeline, and the collected information will be transmitted to the ground through wires for data interpretation.(internal pipeline detection image shown in Figure 12, comparison of internal filler detection images with the real object shown in Figure 13, and comparison of hydrate detection images with the real object shown in Figure 14).
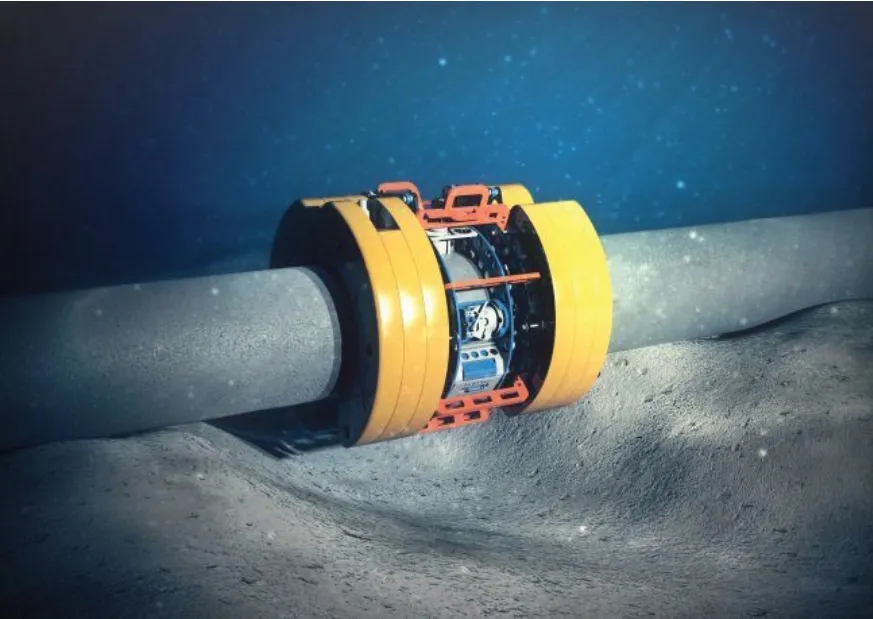
Figure 11.Working State of Pipeline CT Scanning

Figure 12.Internal Pipeline Detection Image

Figure 13.Pipeline’s Internal Filler Detection Image

Figure 14.Hydrate Detection in Coated Pipes
4.Conclusions
Different from alternative technologies such as ultrasonic and pulsed eddy current, the non-invasive submarine pipeline inspection robot based on CT technology is a major breakthrough in submarine pipeline inspection.Using the CT scanning technology of submarine pipeline, the oil company can carry out the non-invasive inspection of complex submarine oil pipeline (including ordinary pipes, riser pipes and pipe bundles in the pipeline) from the outside for the first time, to ensure the safe operation of the pipeline.Furthermore, this technology fundamentally solves the problem that during the use of pipeline internal inspection equipment, the tool is easily blocked or stuck, affecting normal production, and meantime solves the problem of inconvenient inspection after pipeline laying.The ROV can be quickly fixed on the outside of the pipeline, the normal production will be not affected during the inspection process, and the operation equipment will not be affected by the external protective layer of the pipeline because there is no need to remove the protective layer of the pipeline during the inspection process, thus eliminating the risk of corrosion caused by removing the coating.The online real-time communication system can quickly obtain the pipeline status information, with high automation, so it is convenient for engineers to know the pipeline dynamics in time, so as to ensure the pipeline integrity and transportation safety.
The international offshore oil pipeline inspection market is mature and the market demand is huge, but the market is basically controlled by European and American countries.China has just started in this industry, but the market demand is increasing.In the near future, the market will become a large market of RMB100 billion.The design and research in this paper fills the gap in the field of offshore pipeline inspection technology in China, and the technology will be widely used in future.
杂志排行
Modern Electronic Technology的其它文章
- Copyright Rules for UGC Platforms: From the Safe Harbor Rule to a Levy Scheme
- Research on Thermal Management Control Strategy of Electric Vehicle Liquid Cooling Battery Pack
- A Review of Traffic Conflict Avoidance Methods at Intersection Using Vehicle-Infrastructure Cooperation System
- Overview of Vehicle AEB
- A 4-element Rectangular Microstrip Patch Antenna Array
- Research on Direct Torque Control of Permanent Magnet Synchronous Motor for New Energy Vehicles