基于多信息融合算法的变电站消防监测
2021-11-25陈炳华刘辛裔岳雷刚卢晓光
陈炳华,刘辛裔,岳雷刚,卢晓光
(1.国网河南省电力公司直流运检分公司,郑州450000;2.国网河南省电力公司检修分公司,郑州450000;3.许昌许继风电科技有限公司,许昌461000;)
电力安全是关系国计民生的重大事项,电力供应稳定运行在世界各国都是优先保障的头等大事[1]。变电站在电力运行中起重要的枢纽作用,变电站出现问题,影响将是区域电力供应问题,直接或间接地影响整个电力系统的正常安全运行,必然会产生较大经济损失及严重人员安全问题。目前,变电站火灾预警监测的无人化、智能化监控及有效智能化灭火是发展的大趋势。
在变电站这一重要场所,信息误判是致命的,特别是在机器人向远端发出火灾火情达到发展期[2-6],早期处理失效指令后,变电站需断电处理,消防系统进行站内喷淋覆盖。这一动作造成的损失是巨大的,误判是必须避免的。多传感器信息融合技术能够克服单传感器测量信息不全的弊端,有效解决误判问题。
为解决变电站无人值守消防监控和火灾孕育期快速灭火问题[7-10]。开发了具有远程视频及火灾信号传输功能的自动火灾监测预警机器人,用于变电站的运行消防监测和早期火灾自动干预。在机器人的核心处理策略中,引入了D-S 证据理论这一智能化不确定时间的有效判断算法[11];利用多传感器融合信息判断技术,来提高火灾火情的判断精度,力争使变电站火灾预警达到无人胜有人的目标。
1 智能机器人信息融合探测整体规划
信息融合探测消防系统以机器人为主体展开搭建,机器人携带消防介质,对自身判断具有火灾隐患的早期危险进行前期处理,为后续消防争取时间,同时进行多端信息处理及指令收发,协调整个消防系统工作。
机器人工作模式流程如图1 所示。机器人功能定位具有细水雾灭火能力,自然光和红外探测功能,烟雾、气体含量探测功能,远程遥控和后台控制功能。后台辅助设备具有自报警功能,命令机器人出发作业能力,视频及报警信号传输并接入主消防报警系统的接口。下面重点探索机器人根据传感信息进行智能多信息融合判断火情的算法及实现技术。
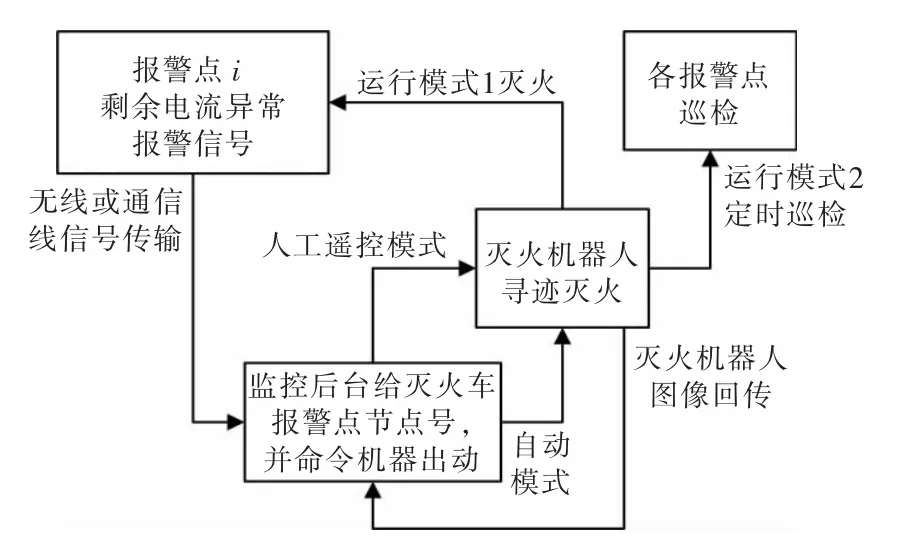
图1 灭火机器人巡检流程Fig.1 Inspection flow chart of fire extinguishing robot
2 基于传感信息的火情特性判断
多传感器数据融合技术能结合智能判断策略,能识别火灾不同发展阶段特性。因此,研究不同传感器所监测到的不同类型及不同火情发展阶段的信息,通过信息融合技术对多源信息进行特征提取、融合计算等处理,得出一个准确且合理的结论,达到准确指导机器人动作及通知其它消防设备干预的最终指令,具有较强实用价值。
2.1 固定监测点电气异常告警信号选择
电气火灾具有时间积累效应,当故障电弧出现后,一般情况下火灾已经发生,而利用火灾特征参量,如温度、CO 的变化量等信息判断,同样意味着火灾已经有极大概率发生,为解决固定监测点告警信息传送,并给机器人到场判断提供时间,需提前预测电气异常,剩余电流为可靠的备选信息。正常电气运行过程,均有剩余电流产生,但电路异常则剩余电流会发生相应的增大,现利用剩余电流的较长时间超过常规阀值来监测设备异常。
剩余电流较长时间超过设定值,则说明设备存在漏电隐患,设备火灾故障概率会急剧增加。剩余电流监测传感器原理如图2 所示,其中S 代表剩余电流探测传感器,可实时监控电路中剩余电流。多传感融合系统以剩余电流监测作为固定监测点预警信号。
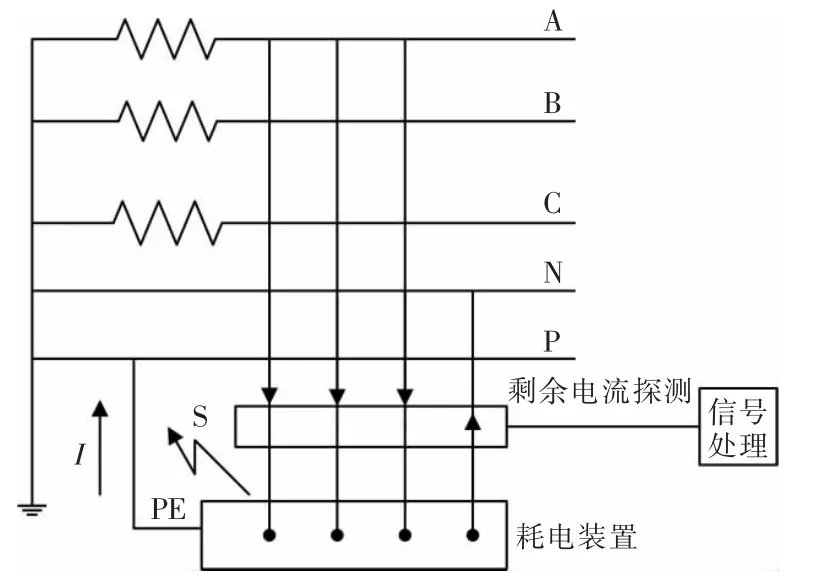
图2 剩余电流监测原理Fig.2 Principle of residual current detection
2.2 机器人抵近监测火灾特征信息选择
机器人就地监测方案:选择最能代表电气火灾发展特性的特征参数进行辨识,重点考虑早预报的需求。在此选择温度、CO 含量、烟雾监测3 种特征源进行监测辨识。这3 种监测源传感监测参变量之间具有互补性优势。
所选3 个变量之间的监测阶段互补性关系如图3 所示。根据需求设定消防机器人自身携带红外远距离测温传感器、烟雾分析传感器和CO 含量分析传感器。现以温度、烟雾、CO 含量为火灾基本探测证据源,分析不同火灾阶段的特性。
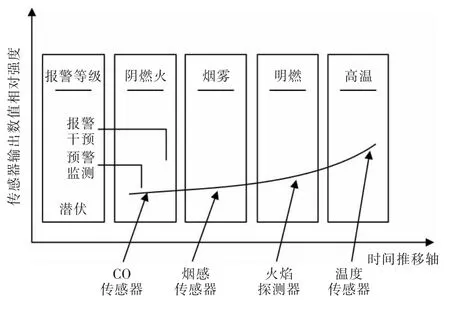
图3 火灾探测器与火灾发展过程对应关系Fig.3 Correspondence between fire detectors and fire development process
烟雾为可见的固体颗粒,是火灾初期最明显的特征,可以把烟雾信息作为早期火灾概率较大的特征数据,在下文制定火灾发生命题基本概率函数时应用。
电气线路发热后,会逐渐释放以CO 为主的多种气体,且释放速度是逐渐增加。CO 较其它释放气体更加明确且因CO 比空气密度小,扩散速度快,更易于被探测车在较远距离及时捕捉。同时应该指出,CO 不能单独判断火灾的发展特性及发展阶段,应融合区分判别。
温度随火灾历程的推进而增加,温度的变化滞后与火灾发展,只有明火产生后温度才会急剧增加。电气火灾绝缘层被烧坏,转化为可见火源后,表面温度会突然上升,这是火灾已经发生的中期阶段。
2.3 火灾发展演变特性趋势分析
电气火灾发生后,经历3 个基本的发展趋势:
初期阶段:温度信息开始高于周围环境,烟雾传感器监测浓度会快速增长,是燃烧不充分阴燃特征,CO 浓度也会快速增长。此时火势变化有不确定性,火灾可能发生也可能被打断,此时机器人检测车抵达后利用携带的少量灭火介质,完全有能力改变火灾的演变趋势,达到灭火效果。
发展阶段:燃烧已经形成,温度急剧上升并接近燃烧物燃烧释放最高温度,并保持温度最高值,烟感传感器测得烟雾浓度达到最大值,CO 气体传感器测得气体含量达到最大值且稳定在一个范围内。
火灾熄灭阶段:可燃物耗尽,温度开始下降,烟感和CO 气体传感器监测浓度均开始下降,最终达到正常,温度变化过程与火灾发展阶段的时长相关,时长越长,温度下降所需时间越长。
以上火灾特征是为火灾发生这一命题赋以基本概率函数的依据。下面将用传感器采集数据,分别给火灾发生这一命题赋以基本概率函数。利用D-S 证据算法对火灾发生概率进行综合判断。
3 D-S 火灾融合算法预警判断模型
灭火机器人携带的多种监测传感器对监测对象进行信息探测后,利用D-S 证据模型进行信息融合,智能判断火灾性质。D-S 理论是贝叶斯推理的推广,D-S 证据结构模型累积计算证据间微小差别,其相对与贝叶斯理论预测模型的优势在于,不需要先验概率支持条件下进行推理计算,对不确定推理模型具有优势。
3.1 火灾预警D-S 识别框架函数建立
设Θ 为识别框架集合,框架中存在N 个相互独立且互斥的判别事件,则D-S 识别框架可表示为

式中:θ1~θN表示N 个独立事件结果。
Θ 所包含的子集表示为2Θ,公式为

式中:φ 表示空集;Θ 为θ1~θN的并集,表示待判定事件的各种可能存在。
火灾报警识别框架选择如下框架形式:

包含子集表达式为

式中:F 表示火灾告警事件;N 表示无火灾告警事件;Θ 代表F 和N 的并集,物理意义为有一定概率出现火灾,现用U 替代可能有火灾的情况。
3.2 火灾可信度函数建立
D-S 证据理论中,概率分配函数进行证据的初始信任分配即(basic probability assignment,BPA);信任函数(relief function,RF)对证据进行信任度描述。
mass 函数: 任意命题A 在识别框架Θ 中BPA是2Θ属于[1,1]的函数m,表示为
m(φ)=0

式中:m(A)为命题A 的初始信任度函数,表征A 的原始可信度;m(A)>0 的子集为A 的焦元(focus element),焦元集构成证据核;m(φ)代表空集信任程度为0。全集信任度累加值一定等于1。
幂集2Θ上定义Bel(belief function)信任函数:

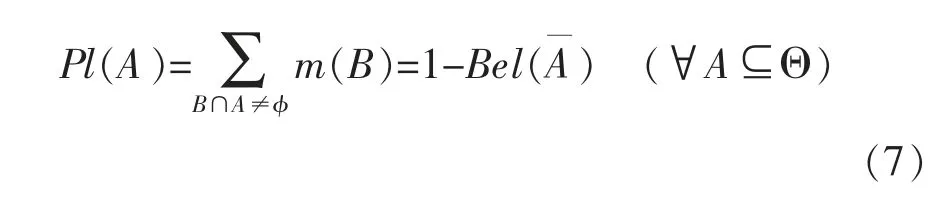
幂集2Θ上定义Pl(plausibility function)似真函数:
Bel(φ)=0
Bel(Θ)=1
Bel(A)代表对A 信任程度;Pl(A)代表对A 不否定程度。则可知如下关系:

这种对命题的判断相对与贝叶斯判据,更有利于处理不确定性模型。对于命题A,其支持区间为[0,Bel(A)],不确定区间为[Bel(A),Pl(A)],拒绝区间为区间为[Pl(A),1],其信任函数区间如图4所示。

图4 信任函数区间示意Fig.4 Interval representation of trust function
3.3 火灾预警信任函数构建
模糊数学可以用模糊隶属度表示事件属于某集合的可能性。这样,隶属结果就可以是0~1 中的所有值。用模糊隶属度来表示不同传感器测得的火灾可能性概率正好匹配火灾单个信号充满不确定性的特征。
模糊集A 在论域U 上隶属度函数为

根据火灾发展规律特征,发现最适合描述火灾概率赋值的隶属度函数服从sigmf 分布。本文以隶属度函数sigmf 分布描述3 种传感器的测量信任度分布,表示为

其中:x 为传感器检测值,即CO 含量、烟感值、温度基准;f 为火灾概率值计算结果。
由式(10)可知,当a>0 时,函数f 为自变量x 的单调增函数,且f 具有极限值1,与火灾基本概率函数相符;当a<0 时,函数f 为自变量x 的单调减函数,且f 具有极限值0,与火灾基本概率函数相符。
现分别设置fA,fB,fC分别表示有火灾迹象基本概率函数、无火灾迹象基本概率函数、火灾不确定性函数,则有:

三个火灾特征参数采集数据所标识的隶属度函数曲线,如图5、图6 和图7 所示。纵轴表示相应的概率值,横轴分别对应传感器测量值。
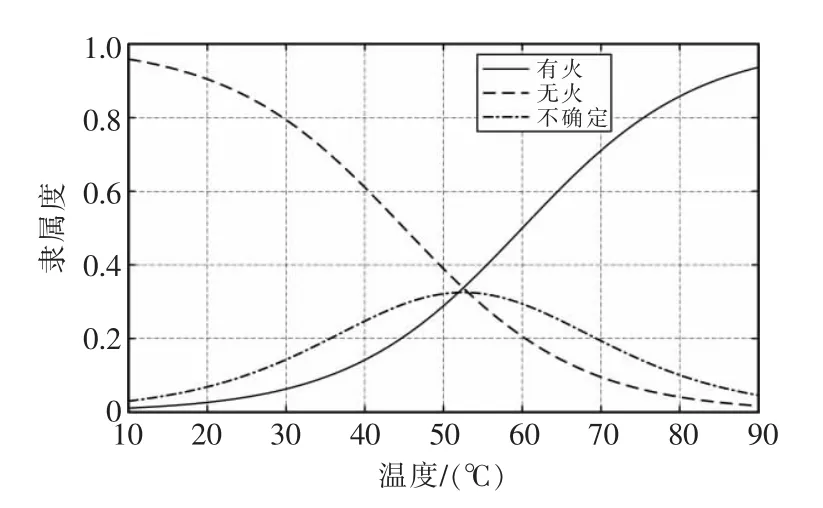
图5 温度传感器隶属度曲线Fig.5 Temperature sensor membership curve
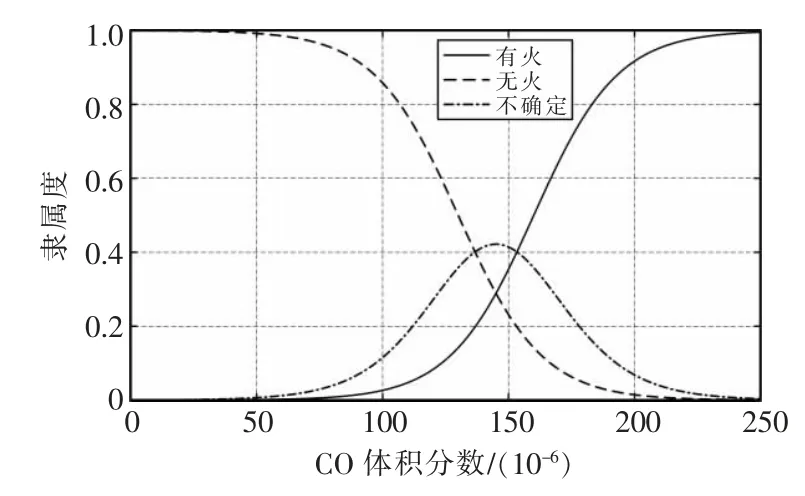
图6 CO 传感器隶属度曲线Fig.6 CO sensor membership curve
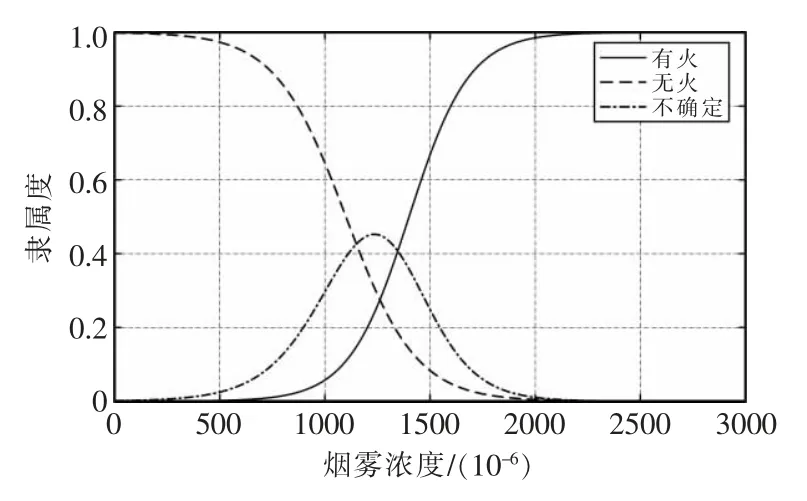
图7 烟感传感器隶属度曲线Fig.7 Smoke sensor membership curve
3.4 火灾证据合成算法
证据合成融合算法是D-S 证据理论的灵魂,对于足以相互独立不完全冲突的多个证据源,经过D-S 证据合成运算可派生出新的信任函数,新的信任函数是多个证据源信息提取、综合的结果,可靠性被认为更高。
现对3 个证据源温度信号、烟感信号、CO 信号定义赋值函数为m1,m2,m3,在火灾识别框架下,m1(F),m1(N),m1(U),m2(F),m2(N),m2(U),m3(F),m3(N),m3(U)分别对应证据源的有火灾赋值函数、无火灾赋值函数和不确定火灾赋值函数。
D-S 证据合成规则为对应多个证据,证据的合成顺序可以互换,即满足交换率,同时证据之间满足结合率。D-S 证据合成规则的这一特征,保证了证据之间的合成顺序组合不影响合成结果。对于2 个不同证据假设其概率分配函数为m(u)和m(v),则其满足如下关系式:

式中:k 为冲突系数,k 值越小代表证据间的冲突越小,1/1-k 可认为是归一化的常量。
两个证据源合成结果,能够作为一个全新的证据源参与下一个证据的合成,这一特性保证了D-S证据合成过程方面的应用实现便捷性。火灾D-S 证据融合判定合成规律如图8 所示。
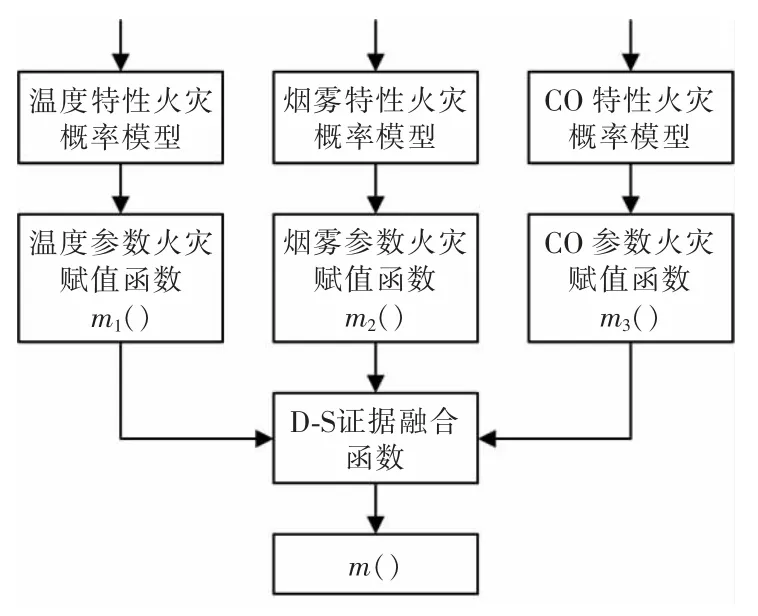
图8 火灾预警D-S 证据融合算法流程Fig.8 Fire warning D-S evidence fusion algorithm flow chart
3.5 火灾判定规则制定
火灾识别的判据可以定义为有火灾概率函数值,其中0.8 为根据实验历史数据得到的识别阀值。
同时,火灾的判定还可以判定为有火灾概率与辨识框架内无火灾概率及不确定概率之差大于0.5为有火灾,可表示为

4 多信息融合火灾概率判断实验
鉴于变电站现场的特殊性,不能进行现场实景实验,只能模拟场景进行算法实验。现搭建多种火灾历程现场,进行判断实验。系统设置传感器5 s 更新一次证据源,根据信息融合过程,一次明确火灾过程的单传感器20 s 后输出融合结果如表1 所示,第二次融合后的输出结果如表2 所示。
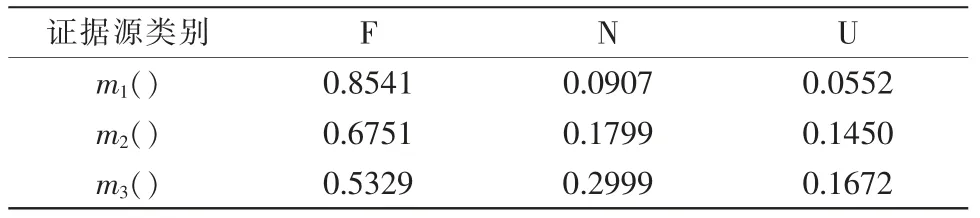
表1 单传感器多次测量融合结果Tab.1 Single sensor multiple measurement fusion results

表2 多传感器融合结果Tab.2 Multi-sensor fusion results
根据表中数据可知,融合判断的火灾概率在第二次融合后显著提高,已经明确判断为火灾发生。这与设置场景的结果高度吻合。由第一第二次融合数据火灾可信度概率可知,随着融合的深入,概率结果向真实情况收敛,这一条信息可以得出结论。此融合算法随着判断历程的加长,结果是向真实性收敛的,融合判断的收敛速度在30 s 之内可达到理想值,达到了快速判断火情的目的。融合算法的判断准确性相对与单一传感器数据,有明显提高。
5 结语
针对无人值守电站消防巡检的要求完成了智能消防监测机器人系统的搭建与开发,并在多传感信息融合技术用于火灾判断的方向进行了重点研究。
首先系统分析了火灾发现特性,针对电气火灾选择了相应的传感测量特征信号,完成了特征信号的规律分析,为特征信号的概率函数制定提供了依据。然后把D-S 证据理论引入到火灾判定中,建立了火灾报警模型,并建立了火灾判定规则,实现了智能化高可靠度的火灾识别。最后对火灾报警系统进行了实验验证,结果表明此数据融合策略能够快速收敛到最终正确结果上,并实现误报率的显著降低。
