桥门式起重机起升高度限位装置
2021-11-24蔡大伟程永恒
刘 兵 蔡大伟 王 亮 程永恒
江苏省特种设备安全监督检验研究院 宿迁 223800
0 引言
在起重机械行业中,桥门式起重机起升高度限位装置是一种比较常见的安全保护装置。起升高度限位器又称上限位,在起重机防冲顶中属于重要的安全保护装置,其可靠性直接影响起重机的安全性能[1]。2021年3月9日,市场监管总局办公厅印发了《市场监管总局办公厅关于开展起重机械隐患排查治理工作的通知》(市监特设发[2021]16号)(以下简称16号文),对桥门式起重机起升高度限位装置的设置提出了新要求。为了更好地贯穿落实16号文的要求,本文结合工作实践,对桥门式起重机起升高度限位器进行讨论。
1 起升高度限位装置结构形式
常用的起升高度限位装置按照检测元件的不同可分为2大类:采用位置开关作为检测元件和采用传感器作为检测元件。
1.1 采用位置开关作为检测元件的起升高度限位装置
位置开关一般只有通、断2种状态,当吊具起升到一定高度时,触发位置开关使其电气动作,进而发出通或断信号(一般是断)。虽然这类高度限位装置不能实时反映吊具高度位置,但应用的控制电路比较简单,传统的继电器控制方式就能实现其功能,且抗干扰性好、成本低。
常用的位置开关有接触式限位开关、非接触式接近开关、光电接近开关3种,其中接触式的限位开关使用最为广泛。
位置开关动作驱动方式有以下几种:
1)低速轴传动驱动 一般通过起升机构卷筒轴带动传动机构(螺杆、齿轮、蜗轮蜗杆、凸轮等)驱动位置开关动作。
2)吊具升降驱动 利用升降的吊具驱动位置开关动作,如重锤式、压板式、拉绳开关式起升高度限位装置。
3)起升钢丝绳卷绕驱动 对于单层缠绕卷筒,吊具起升高度与钢丝绳沿卷筒轴向排列位置有确定的对应关系,据此利用起升钢丝绳卷绕驱动位置开关动作,如断火式起升高度限位装置。
上述3种方式中,低速轴传动驱动方式精度高、重复性好、寿命长,采用这种方式的起升高度限位装置属于16号文中例外情况;采用其余2种方式由于使用过程中不可避免的碰撞、磨损等原因,可靠性较差,应满足16号文中双限位的要求。
1.2 采用传感器作为检测元件的起升高度限位装置
本文所述传感器,是指其输入量(如起升位置)与输出量(如电信号)之间有明确的特性曲线关系,且稳定性应达到一定技术要求的传感器。虽然有些标准中把位置开关(或接近开关)称为位置传感器,由于位置开关不能满足上述要求,在实际使用过程中无法准确且稳定的输出信号,故位置开关不是真正意义上的传感器。
桥门式起重机起升高度限位装置通常采用的传感器有电阻型(如电位器)、光电型(如光电型绝对值编码器),其驱动方式有高速轴(电动机轴)传动驱动和低速轴(卷筒轴)传动驱动。
这类起升高度限位装置可实时向控制系统反馈吊具高度位置,控制系统可根据预先设定的起升高度极限值判断起升高度是否超限,精度高、可靠性好、寿命长,但应用的控制电路较复杂,一般需采用可编程电子控制系统(需验证性能等级或安全完整性等级),且抗干扰性差、成本高。
1.3 关于传动式高度限位装置
16号文中提及的传动式高度限位装置目前还没有准确的定义,本文认为以下几种形式高度限位装置属于传动式高度限位装置:
1)将位置开关与传动机构(螺杆、齿轮、蜗轮蜗杆、凸轮等)组合成行程限位器,再将行程限位器直接或通过万向节、链条、齿轮连接到起升机构低速轴的高度限位装置。
2)将本文1.2条所述传感器直接或通过万向节、链条、齿轮连接到起升机构低速轴、高速轴的高度限位装置,或将编码器码盘直接安装在起升机构低速轴、高速轴的高度限位装置。
2 起升高度限位装置设置
2.1 基本要求
综上所述,桥门式起重机常用的起升高度限位装置有传动式、重锤式、压板式、拉绳开关式、断火式等5种形式,结合JB/T 7688.5—2012《冶金起重机技术条件第5部分:铸造起重机》等标准要求,16号文实施后,桥门式起重机起升高度限位装置应满足表1要求。
对于冶金起重机,标准要求必须通过2种不同形式的起升限位器的设置,双重保护,提升机械安全性[3]。但从表1中可以看出,16号文中对普通桥门式起重机双限位控制要求较低,没有规定双限位动作时必须切断不同级的起升动力源[4],也没有明确规定双限位不应同时动作,本文重点讨论普通桥门式起重机双限位。
2.2 有关注意事项
2.2.1 接触式限位开关
使用接触式限位开关,应采用具有直接断开(不采用弹簧使触头断开)操作的开关电器。图1是一种压板式起升高度限位装置,吊具起升到一定高度顶起压板后,压板推动顶杆向上运动,顶杆再推动推杆向上运动,带动固定在推杆上的动触点向上移动,动触点与静触点强制断开,从而使起升回路断开,该方式属于直接断开。吊具向下运动,离开压板后,压板和顶杆在重力作用下向下移动,在复位弹簧作用下,推杆带动动触点向下移动直至动触点与静触点闭合。
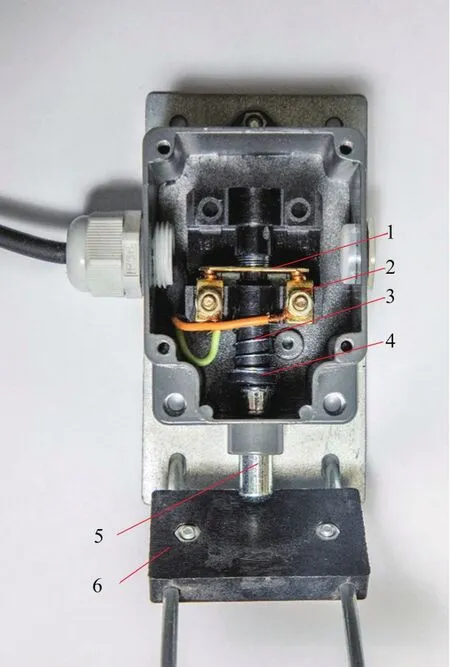
图1 压板式起升高度限位装置
图2是一种重锤式起升高度限位装置,吊具起升到一定高度碰到重锤后,拉绳松弛,顶杆在分断弹簧的作用下,推动推杆克服闭合弹簧的力向上移动,带动固定在推杆上的动触点向上移动,动触点与静触点断开,从而使起升回路断开,该方式采用弹簧使触头断开、非直接断开。吊具向下运动,重锤通过拉绳拉着顶杆克服分断弹簧的力向下运动,推杆在闭合弹簧作用下,带动动触点向下移动直至动触点与静触点闭合。一旦分断弹簧失效,或动触点、静触点粘连,起升高度限位装置将失去作用,故采用直接断开操作开关的起升高度限位装置比采用弹簧使触头断开操作开关的起升高度限位装置更可靠。
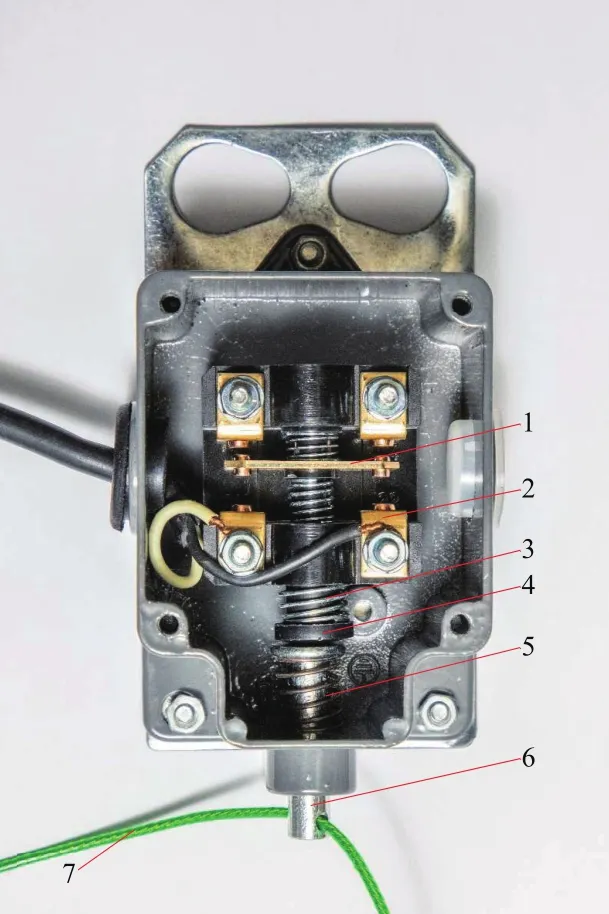
图2 重锤式起升高度限位装置
2.2.2 选型
加装起升高度限位装置时,选择何种形式要考虑以下因素:
1)起升机构形式
对于一体式起升机构(如钢丝绳电动葫芦、环链电动葫芦),由于结构的原因,一般不选用传动式起升高度限位装置。钢丝绳电动葫芦可采用断火式、重锤式、压板式任意2种组合形成双限位。
对于分组式起升机构,要视设备条件情况,采用传动式,或者传动式、重锤式、压板式、拉绳开关式、断火式任意2种组合形成双限位即可。
对于有多套起升机构的起重机,每套起升机构的起升高度限位装置都应满足16号文要求。
环链电动葫芦可采用重锤式、压板式、自配的限位开关(如果有)任意2种组合形成双限位。本文认为环链电动葫芦的安全离合器不满足起升限位器的定义,不应作为一种起升高度限位装置。
2)起重机使用工况
加装起升高度限位装置不应影响起重机正常使用,为了保证起升高度限位装置的可靠性,双限位不应同时动作,为此要考虑加装起升高度限位装置后对起升范围的影响,例如:在原有重锤式起升高度限位装置基础上,再加装压板式起升高度限位装置,会使有效的起升范围减小,影响正常使用。
根据动作原理,重锤式、压板式起升高度限位装置不适用于有下降深度限位要求的场合。
2.2.3 加装方案
设计在用起重机起升高度限位装置加装方案时,除了上述选型因素外,还应考虑:
1)应采用2种不同形式的起升高度限位装置,采用相异技术可提高系统的安全性。
2)虽然16号文中没有明确要求,但建议2套起升高度限位装置不应同时动作,当采用断火式起升高度限位装置时,其应后动作。2套起升高度限位装置分别动作时,应切断不同级的起升动力源(如起升动力回路、总回路)。采用冗余技术能使电路中单一失效引起危险的可能性减至最小。为了方便应急处置,不论哪一级的起升动力源被切断后,仍需保留下降方向动力源。
3)可维护性 加装起升高度限位装置以后,需方便操作,便于维保人员对双限位进行日常检查、维护。为此,加装方案不仅要包括加装后的电气原理图、还应包括对双限位进行日常检查、维护的操作说明。加装后,使用单位应根据加装方案内容,完善相关制度和操作规程,并对相关人员进行培训。
2.2.4 加装起升高度限位装置的施工类别
在用起重机仅加装起升高度限位装置,不论是加装断火式起升高度限位装置,还是其他形式的起升高度限位装置,只要加装过程中没有更换控制系统,施工类别应按照修理进行处理,若干加装过程中更换了控制系统,施工类别应按照重大修理进行处理。
3 建议
1)目前,很多标准规定了起升高度限位装置安全性能要求和控制要求,但缺少起升高度限位装置统一的术语、型号、技术要求和试验方法标准。起升高度限位装置有关一些名词术语还在沿用传统的习惯用法,随着技术的发展进步,这些术语需要进行规范表述。例如安装在起升机构驱动高速轴上,运用减速器的减速比提高精度的新型高度限位器是否属于传动式有待明确[5]。
2)现行的标准均要求双限位动作时应能切断不同级的起升动力源[6],但对于第二级限位动作后是否可进行相反方向运动,GB/T 6067.1—2010和GB/T 3811—2008的规定不完全一致。16号文则完全没有提及对双限位的控制要求。不同起重机生产单位、使用单位、检验机构对16号文的理解各不相同,执行的结果也各不相同,建议各地根据实际情况出台补充规定对双限位的控制要求予以明确。
3)加装起升高度限位装置可有效提高桥门式起重机的本质安全水平,但16号文对加装起升高度限位装置后使用管理要求并不明确,需要引起相关单位注意。
