基于TRIZ理论的无人超市购物小车设计
2021-11-23赵玮
赵 玮
(承德石油高等专科学校,机械工程系,河北 承德 067000)
传统的零售店问题日趋严重,一方面因为传统零售的人力成本逐年增加,另一方面因为货物样式多,管理困难大,并且由于新冠疫情的影响,人与人接触的零售模式受到了很大的冲击,因此实现对超市的自动化、智能化、安全化管理是至关重要的。本文运用TRIZ理论对无人超市购物小车进行因果分析并建立了功能模型[1-2],结合冲突解决理论和进化工具进行无人超市购物小车的设计。
1 无人超市购物小车的工作原理及存在的问题
1.1 工作原理

如图1所示的无人超市自动取货小车可以根据采购者输入的货物编号,自动地定位到该货物所在的货架,通过摄像头扫描二维码的方式确定该货架上的商品是否和采购者输入的货物一致。如果一致,就通过机械手臂将该货物抓取并放入货物斗中;如果不一致或货架已空,则产生报警音,继续去抓取下一个货物。当所有的货物采购完毕后,取货小车将自动返回起始位置,等待采购者进行打包及付款操作。
1.2 存在的问题
无人超市购物小车在工作的过程中会持续不断的抓取货物到货斗中,在这个过程中会出现以下问题:
1)由于货物会增加小车的不平衡性及小车行进过程中的打滑现象,导致小车的行驶路线发生偏差,甚至碰到货架出现事故,无法正确取到所有货物。
2)小车在识别货物时,由于超市内的光线或二维码的角度问题,会导致识别失败从而不能正确抓取货物。
3)抓取货物的机械手在放置货物时,相同尺寸的货物会越累积越高,在小车启动时货物由于惯性的作用会倒下并落在货物斗以外的地面上。
1.3 现有解决方案
针对上述问题,目前有如下改进方案,但是可靠性并不高。
1)采用避障装置,当小车要碰到货架时使之向相反方向运动。该方案只能确保不出现碰撞事故,并不能保证行驶路线完全正确。
2)在扫描二维码摄像头处增加闪光灯,并进行多次识别。该方案可以弥补光线不足带来的识别错误,并不能彻底解决二维码角度不正带来的识别错误。
3)人为干预,即遇到货物掉落时,由管理人员捡起地上的货物放入货斗内。该方案随可以解决货物掉落问题,但是降低了无人超市的自动化程度。
2 基于TRIZ理论的无人超市购物小车设计
2.1 TRIZ理论
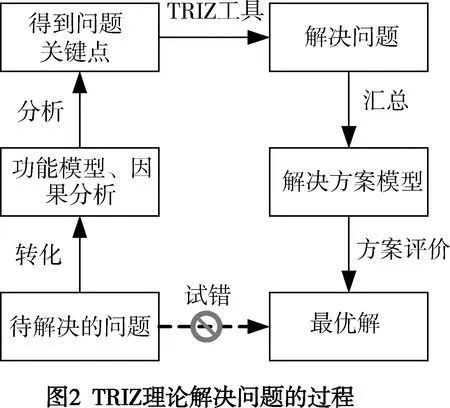
TRIZ理论是前苏联发明家、教育家G.S.Altshuller和他的研究团队,通过分析大量的专利得到的一种解决发明创造问题的理论和工具,它提供了冲突解决理论和进化工具等原理及工具,能够有效解决在设计过程中出现的矛盾[3]。TRIZ理论抛弃了工程应用中常见的试错思想,从待解决的问题出发,通过建立系统的功能模型来进行因果分析,从而确定问题的关键点,然后经过对理想解及可用资源的分析,利用TRIZ工具得到多种解决问题的方案。最后通过对各种方案的可行性评估得到最优的解。基于TRIZ理论的发明问题解决过程如图2所示。
2.2 问题分析
运用TRIZ理论解决无人超市购物小车问题时,首先要将系统中的元件按照制品、系统元件和超系统元件进行分类,如表1 所示。
根据系统分析中得到的各元件,按照TRIZ理论规定的功能描述方式绘制出系统的功能模型图,如图3所示。系统的功能模型图展示了系统中所有元件间的功能关系,通过标准作用和有害作用来描述各元件间的相互作用。通过功能模型,可以找到四个有害作用:
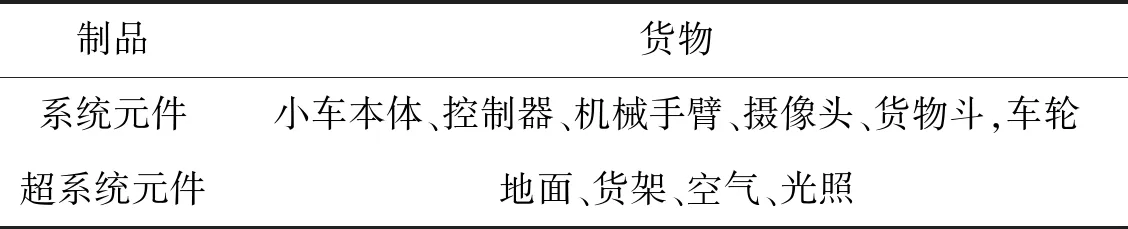
表1 系统分析
有害作用1:车轮在地面上行驶时会出现打滑现象。
有害作用2、3:空气和光照条件会影响摄像头的二维码识别成功率。
有害作用4:货物会从货斗中掉落。
通过系统的功能模型中的有害作用来进行因果分析,如图4所示。
通过对有害作用进行因果分析得到了解决问题的三个关键点:
问题关键点一:行驶时小车行驶路线产生偏差。
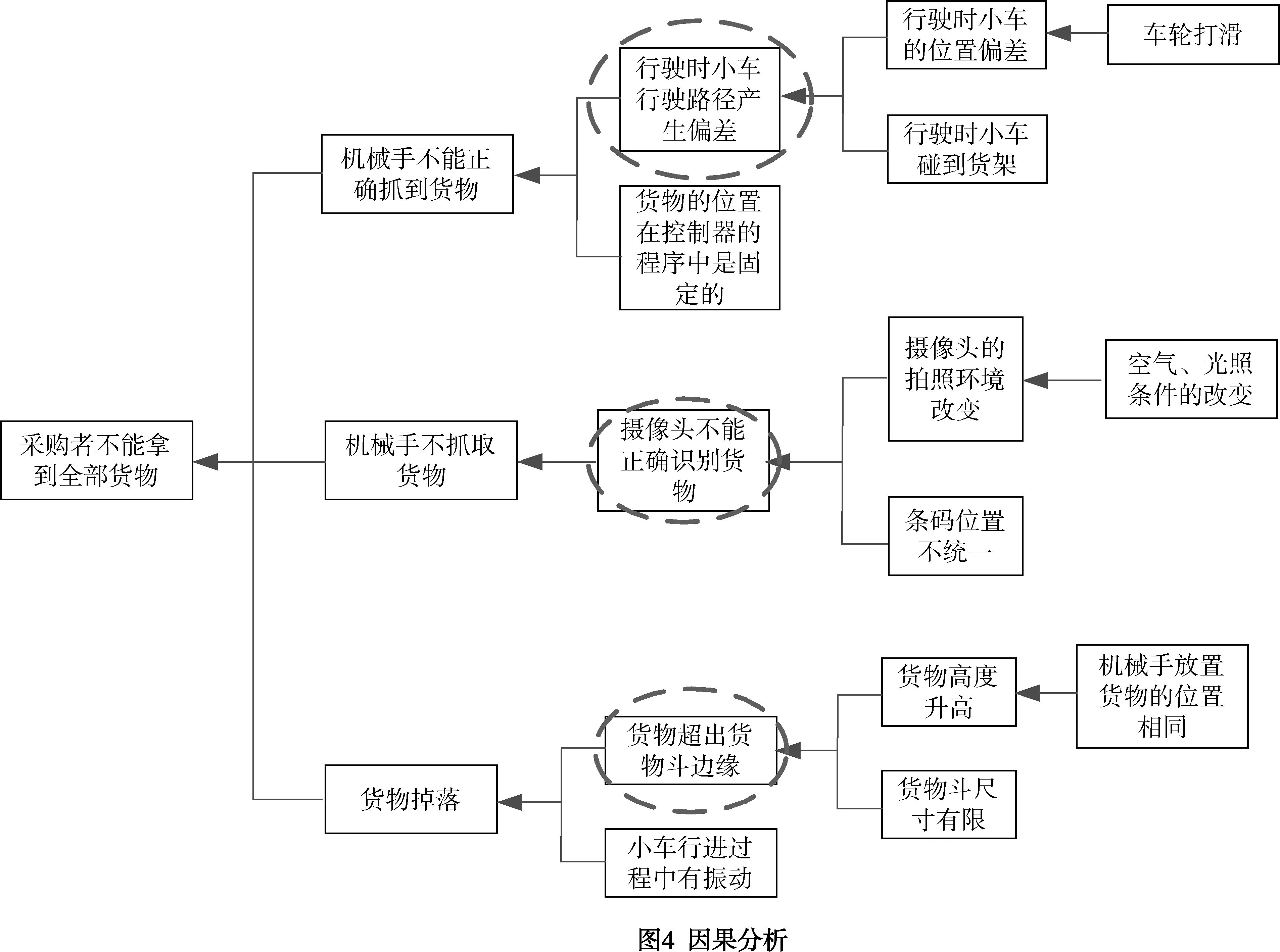
问题关键点二:摄像头不能正确识别货物。
问题关键点三:货物超出货物斗边缘。
2.3 问题解决
针对因果分析得到的三个问题关键点,利用适合的TRIZ工具来解决问题。
1)问题关键点一:行驶时小车行驶路线产生偏差。
TRIZ工具:冲突解决理论。
为了修正行驶时小车的位置偏差,就需要在系统中增加纠偏装置,但是增加纠偏装置后会增加系统的复杂性。将纠偏装置和增加系统的复杂性转化成TRIZ标准冲突后,通过查找冲突矩阵可以得到如下发明原理。

表2 问题关键点一的矛盾分析
方案一:依据No.10(预操作)发明原理,得到解如下:
定义为轨道方案,在无人超市内部预先安装有取货车行走的轨道,使取货车每次转弯时都按照轨道的路线进行转弯。
方案二:根据No.10(预操作)发明原理,得到解如下:
定义为磁导航方案,在无人超市的地面下,提前放置磁条;在小车内放置磁导航传感器,通过磁力的作用,修正小车的位置,使小车始终行驶在有磁条的地方。
2)问题关键点二:摄像头不能正确识别货物。
TRIZ工具:进化分析。
步骤①:通过对先有的技术系统的进化过程进行分析[4],选择技术进化定律“向复杂系统进化”。
无人超市采货小车经历了如下三个阶段:
固定采购车(自动贩卖机)—推车进行采货(大型无人超市)—自动采货(大型智能化无人超市)
步骤②:依据现有的技术系统的进化发展过程,选择技术进化路线“增加部件的多样性”。
固定采货车(自动贩卖机)—推车进行采货(大型无人超市)—自动采货(大型智能化无人超市)—人工智能自动采货车(人工智能无人超市)
步骤③:按照选定的技术进化路线,判断现有技术系统在进化路线上的位置,进而确定潜力状态。
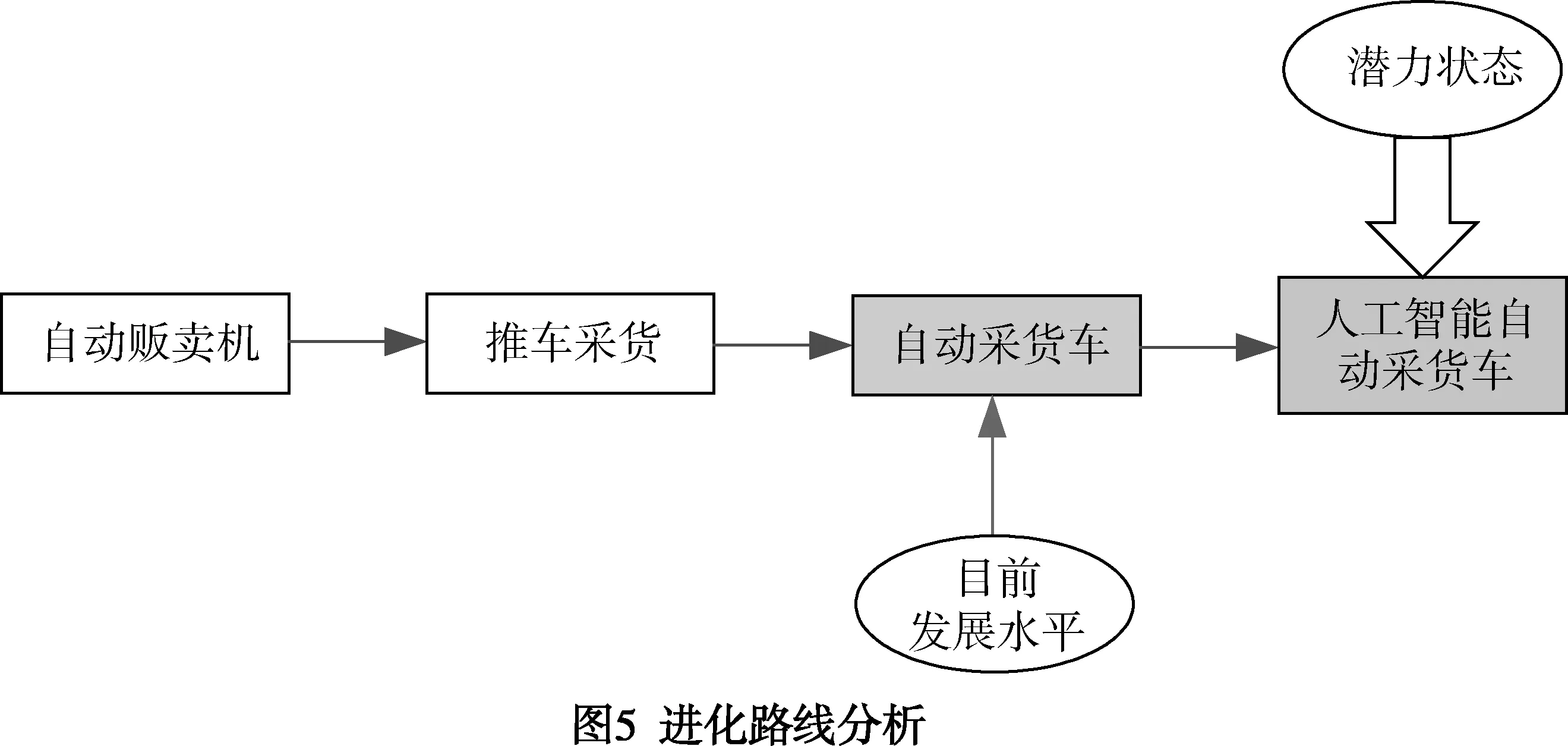
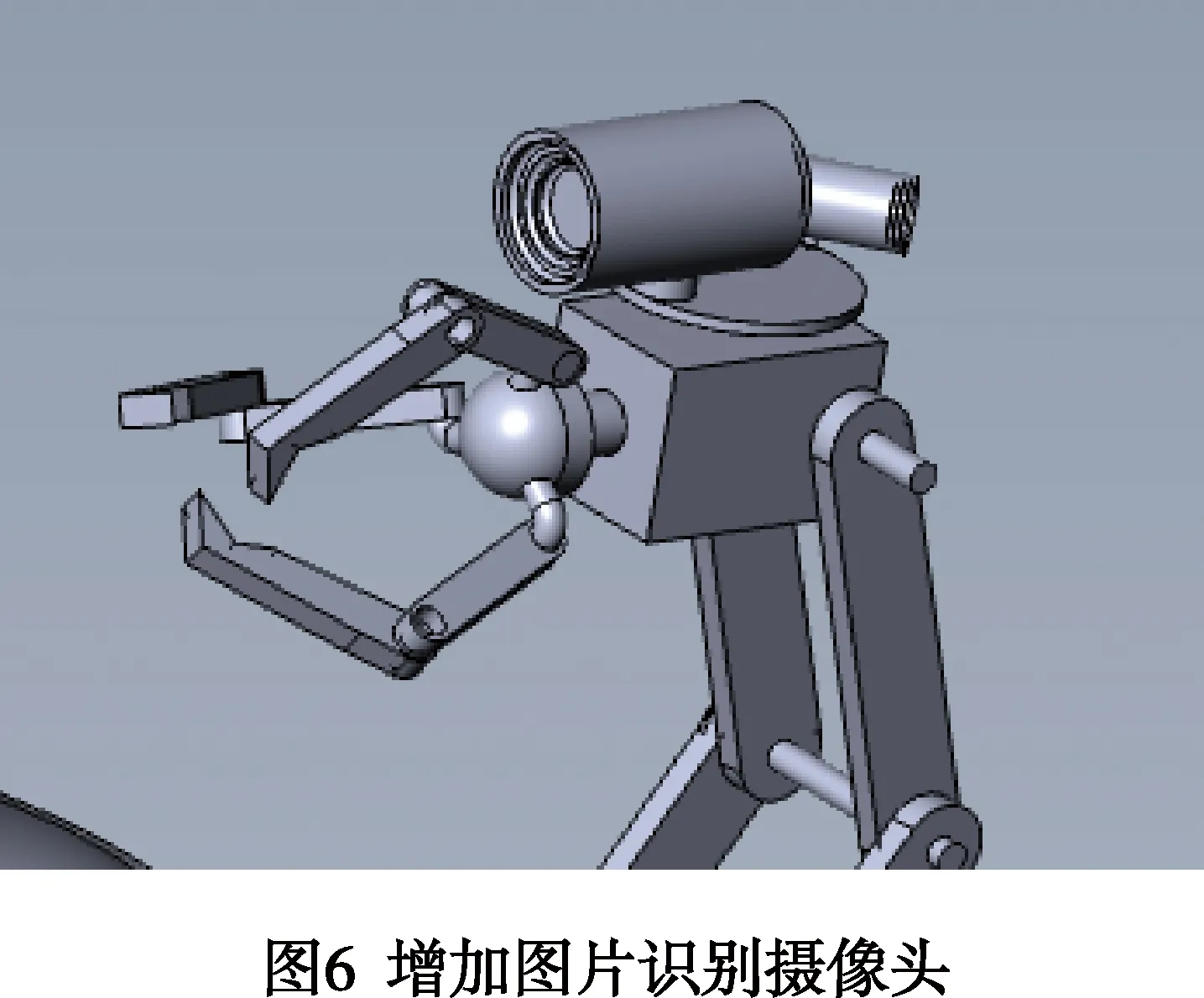
按照潜力状态,得到解决方案三:定义为图片识别方案,增加带有图片识别功能的摄像头,可以在进行扫码失败时自动启用,通过图片比对的方式对货物进行识别,如图6所示。
3)问题关键点三:货物超出货物斗边缘。
TRIZ工具:冲突解决理论。
为了使货物能够在货物斗内稳定的存放,我们需要一个很大的货物斗,使货物不超过货物斗的边缘,但是这样会增加货物斗的尺寸。将稳定的存放和增加货物斗的尺寸转化成TRIZ标准冲突后,通过查找冲突矩阵可以得到如下发明原理。

表3 问题关键点三的矛盾分析
方案四:依据No.14(曲面化)发明原理,得到解如下:
定义为圆形货斗方案,将货物斗的底面做成球面,当货物被放到货物斗内会自动寻找平衡点,使多个相同的货物在同一点被放下时,不会再进行高度上的累加,如图7所示。
方案五:依据No.24(中介物)发明原理,得到解如下:
定义为振动方案,在货物斗内安装振动装置,在每次放置货物后启动振动装置,使货物斗内的货物进行重新布局,防止高度累加。
2.4 最优解确定
对上述四个方案从技术难度、操作难度和成本三个方面进行评价[5],得到方案评价表,如表4所示。
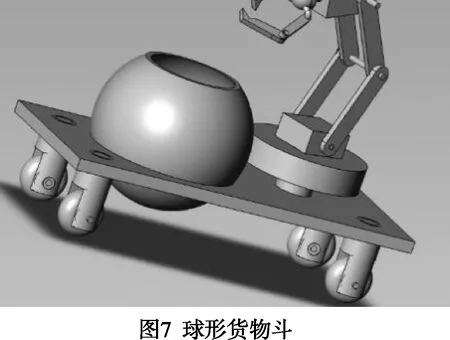
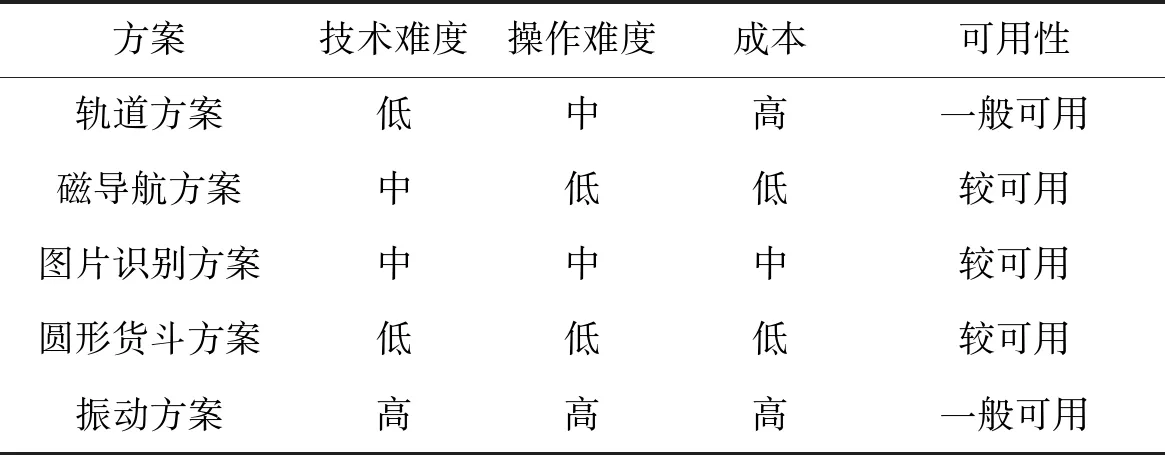
表4 方案评价与可用性分析
根据表4中对所有解决方案的评价与可用性分析,结合购物小车及无人超市内部的具体环境要求,得到的最优解为:
在无人超市内安装磁条,在取货车上安装磁导航,使小车可以无偏离行驶,使机械手能够正常抓取到货物;在小车上增加带有图像识别的摄像头,当扫码失败时利用图像识别进行货物确认;将货物斗的底面做成球面,使货物在货物斗内摆放时高度降低,防止掉落货物斗外。
3 结语
本文根据无人超市购物小车现存的问题运用TRIZ理论进行了创新方案的设计:对小车进行系统分析、建立功能模型及因果分析,并在因果分析的基础上得到了解决问题的三个关键点。根据冲突解决理论与进化工具得到了五种解决方案,最后通过对五种解决方案进行评价与可用性分析,得到了最优解。TRIZ理论提供的工具可以在设计过程中发现并解决出现的矛盾,是一种科学有效的创新设计方法。
