基于驱控一体技术的门机控制器的开发
2021-11-23向前进王毅璇
向前进,王毅璇
(中国电子信息产业集团有限公司第六研究所,北京102209)
0 引言
快速卷帘门是快速升降的无障碍隔离门,主要作用是快速隔离,在食品、化学、纺织、超市、冷冻、物流、仓储、车库等多种场所有着广泛应用。快速卷帘门的种类繁多,主要分类有以下几种:(1) 大门、小门;(2) 软帘门、硬质金属门;(3) 速度快和速度慢的门。不管是哪种卷帘门,均要求运行平稳、长期运行往复定位精度高、无累积误差。
随着电力电子技术、微电子技术的迅猛发展,在运动控制领域中驱控一体技术的发展势头也越来越猛。驱控一体技术主要体现在系统的硬件结构设计上,将驱动部分和控制部分合二为一,采用驱动与控制紧密结合的构架技术,与传统的驱动控制分离式相比,既减小了控制器体积,又提高了数据传输的精确性,成本也有所减少[1-8]。
目前,市场上70% 以上的快速卷帘门控制器采用“PLC+ 变频器” 或“MCU 控制板+ 变频器” 的控制方案,其控制柜体积大,定位精度低,性价比不高。随着科学技术的发展和人们对卷帘门要求的不断提高,迫切需要设计一款新的门机控制器,满足高速、高精度、高可靠性等要求。
本文创新性地给出了快速卷帘门控制器的逻辑控制和伺服驱动的主控CPU 合二为一的实现方案。
1 设计方案
1.1 控制器设计要求
1.1.1 功能要求
控制器的主要功能要求如下:
(1) 触摸屏具备功能设置、参数设定、门机定位及状态显示等功能;
(2) 运行状态下,可通过“ 开门” 按钮、“ 关门” 按钮实现对门的开启与关闭,通过“ 急停” 按钮实现特殊情况下的门的停止;
(3) 门在下降过程中如“ 光电/ 气囊” 信号有效,则门需停止下降并重新开门至上限位位置;
(4) 在运行状态下且系统设置为“ 自动” 时,当“ 雷达/ 地磁” 信号有效时,门需开启至上限位位置。若是在门下降过程中感应到信号,门需停止下降并重新开门至上限位位置;
(5) 调试状态下,通过对“ 原点” 信号的采集,完成在“ 行程开关” 工作模式下的机械位置的“ 对标”;
(6) 具备可设置的干接点输出信号功能;
(7) 具备过流、过压、遇阻、超时等保护功能;
(8) 具备半开、防冻运行、一键开关、故障提示等其他功能。
1.1.2 性能要求
主要性能要求如下:
(1) 快速卷帘门运行速度为0.6 m/s~1.5 m/s ;
(2) 运行速度过渡平稳。
1.2 技术方案
依据快速卷帘门控制器的设计要求,现给出一种基于驱控一体技术的解决方案,如图1 所示。
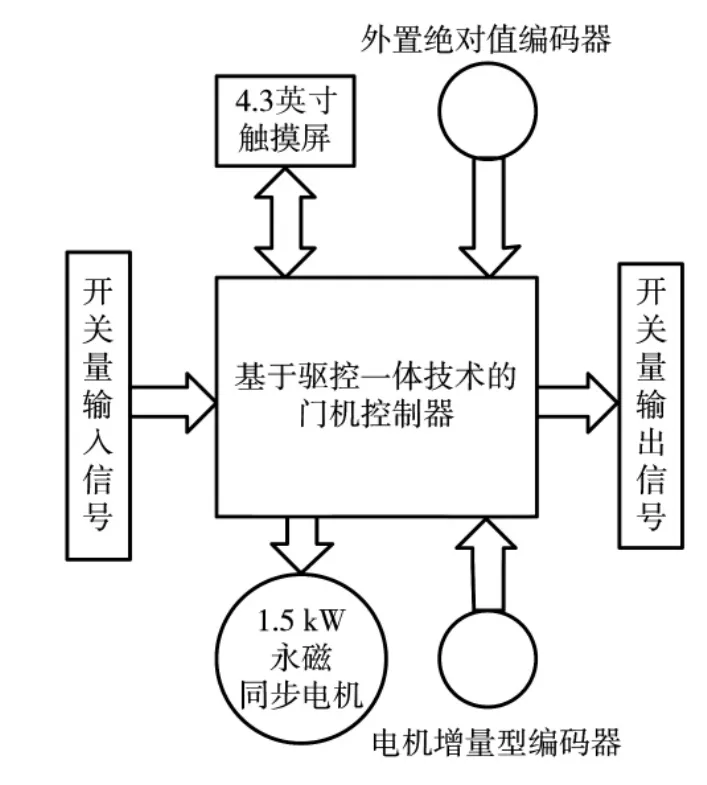
图1 门机控制器设计框图
其中,4.3 英寸触摸屏及外置绝对值编码器与门机控制器之间通过通信的方式进行数据交互;门机控制器可驱动1.5 kW 的永磁同步电机,同时以脉冲的形式实时采集电机的位置信息,以电流的方式采集电机的反馈电流,从而实现对电机的三环控制[9];门机控制器共有12 路开关量输入通道,5路继电器输出通道。
2 硬件实现
基于驱控一体技术的门机控制器的硬件,就是将伺服电机驱动及逻辑功能控制的硬件需求集中设计到一块电路板上。
2.1 DSP 选型及最小系统
门机控制器主控制芯片选用TI 公司的TMS320-F28069 芯片。该芯片是32 位的带浮点运算的高性能DSP,在运动控制领域中有着广泛的应用。该芯片还具有丰富的片内外设资源,如3个32 位的通用定时器,8 路增强型的脉宽调制器,2个增强型的正交脉冲电路模块,2个串行通信接口模块等[10]。
门机控制器的最小系统以TMS320F28069 芯片为核心进行构建,芯片外围电路由电源、晶振、复位及JTAG 接口等组成。
2.2 开关电源电路设计
开关电源是一种采用开关方式控制的直流稳压电源。它以小型、轻量、高效率的特点被广泛应用于各种电子设备中,是当今不可或缺的一种电源方式[11]。
门机控制器的开关电源电路共有8 路输出:2路24 V 外围I/O 电路供电,4 路+15 V 供电给IPM模块,1 路+5 V 给DSP 供电,1 路+12 V 电路给电源启动电路供电。
2.3 电机驱动电路设计
电机驱动电路主要包括相电流采样电路、增量编码器反馈电路、脉宽调制电路等。
2.3.1 相电流采样电路
相电流采样电路主要是给驱动电路的电流环控制提供反馈信号。控制器共采集了2 路相电流:Iu 和Iw,如图2 和图3 所示。
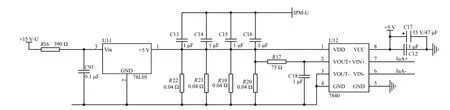
图2 相电流采集电路1

图3 相电流采集电路2
2.3.2 增量编码器反馈电路
增量编码器反馈电路为驱动电路的速度环控制和位置环控制提供反馈信号。该部分电路采集电机的增量型编码器输出的3 路脉冲型差分信号。DS26LS32AC 用于编码器反馈的差分转单端,见图4 。

图4 增量编码器反馈电路
2.3.3 脉宽调制电路
脉宽调制电路主要是将DSP 输出的SVPWM 的信号经过调制后,送入IPM 的控制端子,从而控制其6个IGBT 的通断。A4504 用于IPM 接口信号的隔离,74AHC14 对A4504 的输出信号进行反相,如图5 所示。

图5 脉宽调制电路
2.4 开关量输入输出电路设计
2.4.1 普通光耦输入电路
该电路用于门机控制器的12 路输入信号的采集,如开门、关门、停止、光电/ 保护、雷达/ 地磁、原点、互锁、一键开关门等信号。其中任意一路的原理图设计见图6 。

图6 普通光耦输入电路
2.4.2 普通继电器输出电路
继电器输出电路主要用于门机控制器向外输出普通的继电器节点信号。继电器输出触电需具备24 V~220 V/0~1.5 A 的带载能力。普通继电器输出信号有互锁及多功能输出等,如图7 所示。

图7 普通继电器输出电路
2.4.3 继电器控制的单路交流市电输出电路
快速卷帘门的伺服电机尾部安装了一个抱闸装置,需门机控制器的1 路输出进行控制。抱闸装置由220 V 市电供电,上电时抱闸松开,电机可转动;掉电时抱闸锁死,电机不转动。其输出电路设计见图8 。

图8 继电器市电输出电路
2.5 通信电路设计
门机控制器通过RS232 方式与4.3 英寸触摸屏进行通信;通过RS485 的方式与外置绝对值编码器进行通信。限于篇幅,这里不再给出其电路图。
3 软件框图
软件开发工具为CCSv6 的集成开发环境(IDE)。门机控制器软件框架如图9 所示。

图9 门机控制器的软件框图
门机控制器的软件系统是一个简单的操作系统,各个模块均在该操作系统的组织、管理及调度下工作运行[12]。
3.1 相关运动子程序介绍
3.1.1 急停子程序Motion_DREMG()
调用该子程序后,伺服电机将以最快速度停车,电机轴将处于零速锁定状态且无法拨动。
3.1.2 定长运动子程序
定长运动子程序Motion_PSOUT(uint16_t axis,int32_t position_out) 有两个形参[13]: 一个是轴号,为16 位的无符号整数,取值范围0~5;另外一个是定长的脉冲数,为32 位有符号的整数,符号代表电机运行的方向,“+” 为正转,“-” 为反转。定长运动子程序采用的是计算量较小、机械平滑性较高的四次多项式位移曲线[14]。
3.2 用户程序介绍
3.2.1 触摸屏程序设计
HMI 选用迪文科技的4.3 英寸触摸屏,实现功能设置、参数设定、门机定位及状态显示等功能。其中监控主界面见图10 。触摸屏功能实现的部分汇编代码[15]见图11 。

图10 触摸屏监控主界面

图11 触摸屏部分汇编代码
3.2.2 关键控制功能的实现算法
门机控制器的关键控制功能是实现门的“ 开”、“ 关” 动作,其他逻辑控制则解决门在什么条件下“ 开” 和“ 关” 的问题。以从电机的增量编码器采集的数据Xn为源数据,建立以Xi为变量的直线坐标系,如图12 所示。

图12 以Xi 为变量的直线坐标系
开门动作的实现算法为: 求d=Xu-Xi;松抱闸;延时;调用Motion_PSOUT (0,d);到位后锁紧抱闸。关门动作的实现算法只需将Xu换成Xd即可。
4 功能性能测试
4.1 功能测试
功能测试主要是利用输入信号组合变化来模拟各种场合场景,重点查看其逻辑控制功能是否满足要求。
经测试,门机控制器的功能满足不同场合和场景的需求。
4.2 性能测试
经测试和计算,快速卷帘门运行速度为0.829 m/s ;开关门运行速度平稳,其曲线见图13,其中,横坐标为时间,纵坐标为速度;万次重复定位精度小于1 mm 。

图13 开关门速度曲线
5 结论
本设计方案具备量产条件,并已商业化,产品得到了用户的一致好评。目前该门机控制器年销售量在5000 套以上。
本方案还有待改进提高的空间,如电机编码器可由绝对值编码器升级替代,系统性能将会极大提高。另外,还可考虑加入无线通信模块,从而实现手机APP 远程监控。