基于柔性驱动的手指康复装置
2021-11-23田云龙
田云龙 张 蓓
(武汉软件工程职业学院,湖北 武汉 420305)
0 引言
我国每年有大约150万的新发脑卒中患者,其中约70%的患者遗留有诸如手指抓握障碍等功能障碍,这些功能障碍需要通过物理治疗加药物治疗的方式才能达到较好的效果[1]。因此国内外的多所高校及科技公司都在致力于手指康复装置的研究和开发,手指康复装置的驱动方式包括驱动、连杆铰链、液压、钢丝牵引等方式,其中韩国MAREF公司设计的手部康复训练装置RELIVER RL-10、华中科技大学设计的手指康复装置采用的是气动方式,气动方式的特点是控制精度高、但是需要额外的附件提供气源,设备较大。日本学者Ueki研发、Worsnopp等美国学者、哈尔滨工业大学等采用四连杆铰链的结构进行手指驱动,整体结构较为复杂[2],厦门大学、燕山大学等国内大学采用钢丝驱动方式开发了多款绳索手指驱动康复机器人[3]。
虽然国内外学者对手部的康复装置进行了广泛研究,但是目前的手部康复机器人仍然存在便携性低、价格昂贵、结构复杂等问题,大大限制了康复设备的推广与应用。基于此,该文提出了一种柔性驱动的质量轻、好穿戴、便携、操作简便的手部康复设备设计方案。
1 柔性驱动设计
1.1 动力源设计
基于气动或者液压驱动的手指康复装置需要增加气泵或液压泵等额为附件,导致此类设备不能便携使用,设备也相对昂贵,普通家庭也不具备购买力,相比于气动和液压等驱动方式,采用钢丝柔索[4-5]等软性介质进行驱动不需要额外的附件,可实现便携式、轻量化,装置整体结构更简洁,该文中采用柔性钢丝作为动力传递的介质,为了实现轻量化的目的,采用单电机驱动手指进行抓握运动,减少了电机数量,减轻重量,使用方式上采用可穿戴的设计,满足患者居家使用的需求,使用过程中不受使用场景的限制。根据人体手的结构,以右手为例,舵机的放置位置有3个:1)手背,动力要由手背传递到手指部分,经过的路程远,转过的角度较大,所以不合适布置舵机。2)手腕右侧。3)手腕左侧,(2)和(3)2个位置符合人体手部的曲线,经过的路程较短,并且不需要转较大的角度,与位置(3)相比,位置(2)在使用过程中与物体接触较多,因此布置舵机的话容易造成磕碰等,所以综合考虑选用位置(3)作为舵机放置的位置。
1.2 手指弯曲部分设计
设计中,手指部分根据人体解剖的生理结构[6],采用仿生人体的设计,根据人体关节的结构进行手指弯曲部分的设计,结构图如图1所示,在抓握过程中,两副连杆绕铰链进行弯曲运动,从而实现了关节弯曲,两副连杆的弯曲,带动手指在0°~90°进行旋转,完成手指的弯曲抓握。
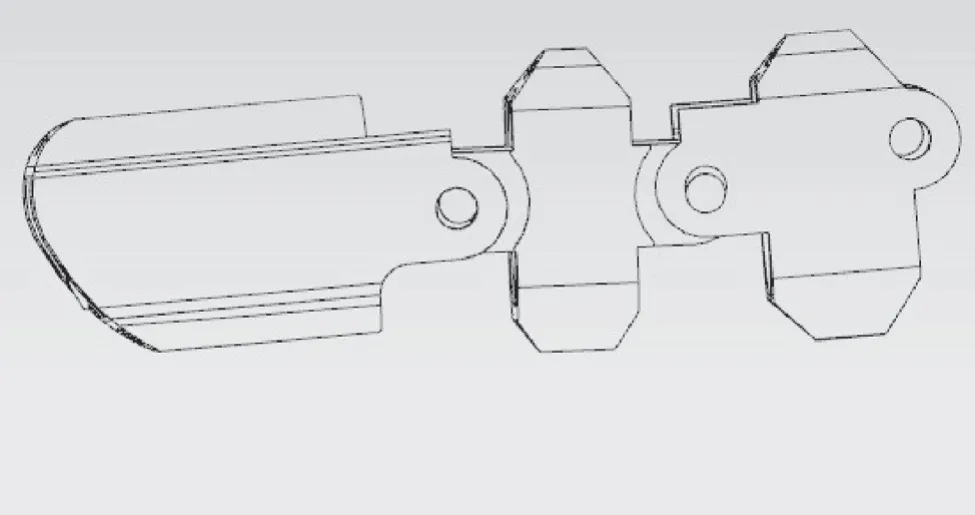
图1 仿生手指结构及结构原理图
根据手指关节的特点,人体手指的抓握过程为一端自由的双连杆结构,关节部位为铰链连接,在抓握过程中,两副连杆绕铰链进行弯曲运动,从而实现了关节弯曲,手指进行抓握。在设计中手指连杆的自由度计算如下。

式中:n指关节活动构件数,PL为低副约束数,Ph为高副约束数。
根据手指结构得n=3,PL=0,Ph=3,所以可得手指结构的自由度F=6,说明每个指节均可在2个自由度运动,在此基础上,在设计中限定由钢丝绳提供自由度限定条件,各个指节可以模拟人体的抓握动作,围绕铰链进行旋转运动,完成模拟抓握。
在设计过程中将指套做成中空,手指与掌部连接位置采用可拆卸的铰链设计。中空的设计满足用户穿戴时手指穿入的需要,减轻了产品的质量,手指部分及其装置其他主体结构均制造采用FDM打印技术,所以可根据康复患者的手指长短和粗细进行个性化定制。
1.3 柔性动力传递设计
人体5根手指要做出复杂的动作,需要对每根手指进行单独的动力驱动和控制,但是对脑卒中患者而言,手指康复的运动过程主要是借助设备进行抓握和舒展的重复锻炼,所以手指康复的动作较为简单,不需要复杂的抓握动作,手指康复锻炼过程中,5根手指的抓握和舒展可以认为是动作同步的运动过程,因此可以采用1个动力源进行驱动,该装置采用1个舵机作为动力源驱动5根手指,在满足锻炼动作的同时减少了动力源,减轻了装置的重量。动力传递上利用一个线辊进行传递和动力分配,线辊上缠绕0.5mm钢丝绳作为动力传递的介质如图2,在分隔式线辊上将每根手指的驱动位置进行区分,每个分区驱动一根手指,在分区中从拇指到小指各有对应的位置,分区之间相互不干涉,并且因为是用一根线辊驱动,所以五根手指的运动趋势是相同的,克服了手指运动不同步而造成运动不协调抓握不平稳的问题。

图2 线辊结构及线辊分区
整个装置传动过程中,线辊起到了至关重要的作用,其运动的平稳性和稳定性决定了产品运行的平稳性,采用Ansys Workbench对该结构进行结构静力学分析,以模拟预测关键部位的受力情况和变形程度,对线辊的可靠性进行分析,不考虑实际零件的公差配合关系,因为线辊的结构整体较为简单,网格密度适当取小,网格密度采用0.01mm规格,线辊采用FDM打印成型,材质为ABS,参数设置:1.05g/cm3~1.18g/cm3,弹性模量值为2GPa,泊松比值为0.394,采用静态分析,不考虑时间维度变化,线辊在运行过程中认为舵机提供的扭矩与钢丝绳的阻力产生的扭矩平衡,对线辊的圆周施加的载荷为0.86N·m,在线辊的端部施加的载荷也为0.86N·m,分析结果表明等效应力主要分布于线辊的圆周位置,最大剪切应力为2.25MPa,远低于ABS的剪切强度19.6MPa,因此其强度足够,最大变形量为1.2832×10-4mm,线辊的变形小,该数值在公差允许的范围内,不会对传动造成影响。
舵机的动力输出采用0.5mm的钢丝绳作为动力的柔性输出,要将舵机的动力从手部位置最终传递到手指,需要经过一定的路径才能完成,由于钢丝属于柔性介质,所以钢丝的动力不需要齿轮、铰链等进行动力方向的转变,在装置设计中采用线扣进行动力传输角度的变换,线扣布置于手部的外壳,与手部外壳一体通过FMD进行打印制作,考虑到钢丝传动的转换角度不宜过大以免卡死现象的产生,所以线扣采用流线形的布置如图3(a),线扣可以在0°~90°对传递动力的钢丝绳进行方向的改变如图3(b),动力从舵机位置通过多级的线扣角度转变,输出至指套的尖端,从而实现了舵机—线筒—线绳—指套的动力传输过程。
在指套的尖端均设计了指尖钢丝的固定端如图3(c),钢丝绳上下分别固定,钢丝固定后其总长即确定,对每根手指而言,当舵机驱动手指抓握时,图 3(d)下端钢丝绳拉紧,下端钢丝绳总长减短,上端钢丝绳则加长,这时指套即带动手指绕着指套铰链进行弯曲抓握,钢丝下端拉紧时则手指弯曲,当舵机反转时,则上端钢丝绳拉紧总长逐渐缩短,下端钢丝绳逐渐加长,指套则带动手指从抓握状态逐渐恢复至舒张状态,通过上下端钢丝绳的往复拉紧和放松,从而可以带动手指进行往复的指抓握和舒展锻炼。下端拉紧和上端拉紧通过舵机的正转和反转实现,通过以上的设计,手指的抓握和舒展最终通过舵机的转动进行控制,所以通过控制舵机的转动方向、转动速度、停留时间等参数可以达到控制手指抓握锻炼的目的。
1.4 电源与控制部分
该产品针对需要康复的群体,在日常生活中,这类人群也不需要取用过重过大的物品,只需要满足手指进行抓握的辅助动力即可,在设计中,基于每根手指承受4kg重量的屈伸力,在舵机上选择了20kg规格的舵机,采用6V充电电池用以驱动舵机,电池容量20000mAH,控制模块采用STM32开发板进行控制,可语音进行控制,并且开发板接口丰富,可接入有心率、血压等检测模块,实时监测用户的身体参数,发生突发事件可即时报警,在第一时间对突发疾病做出反应。前端人机交互设计采用引导式的操作界面,通过患者健康指标,综合判断患者的康复状态,推荐对应的康复训练方案。此外,用户从操作界面上还能够读取康复过程中的健康数据,在体征数据有异常时,系统会给出相应的提示。
2 设计实物图
在设计中,根据产品特性,利用FDM打印技术进行第一代样机的手指指套和手掌部分的打印,根据每个用户的手指参数进行个性化的制作,使得设计产品更加贴合,更加实用和舒适,考虑到产品主要起到的作用是辅助抓握,能够完成传动即可,所以加工精度要求不高,因此FMD打印技术完全能够满足精度要求,在打印材质上选用ABS工程塑料,其强度在70MPa~90MPa,满足手指拉伸过程中的受力,并且FDM技术可以打印ABS材质,所以材质上也满足产品的需求,因此装置整体机身及主要传动零件均采用FDM打印技术进行制造,实现了个性化的定制穿戴,根据设计的结构进行实物加工,以上各部分进行装配后得到基于柔性驱动的手指康复装置如图4所示,装置整体机身及主要传动零件均采用FDM打印技术进行制造,实现了个性化的定制穿戴,从穿戴效果照片可以看出,装置整体穿戴较为舒适,能够满足手指康复患者对手指抓握锻炼的需求。
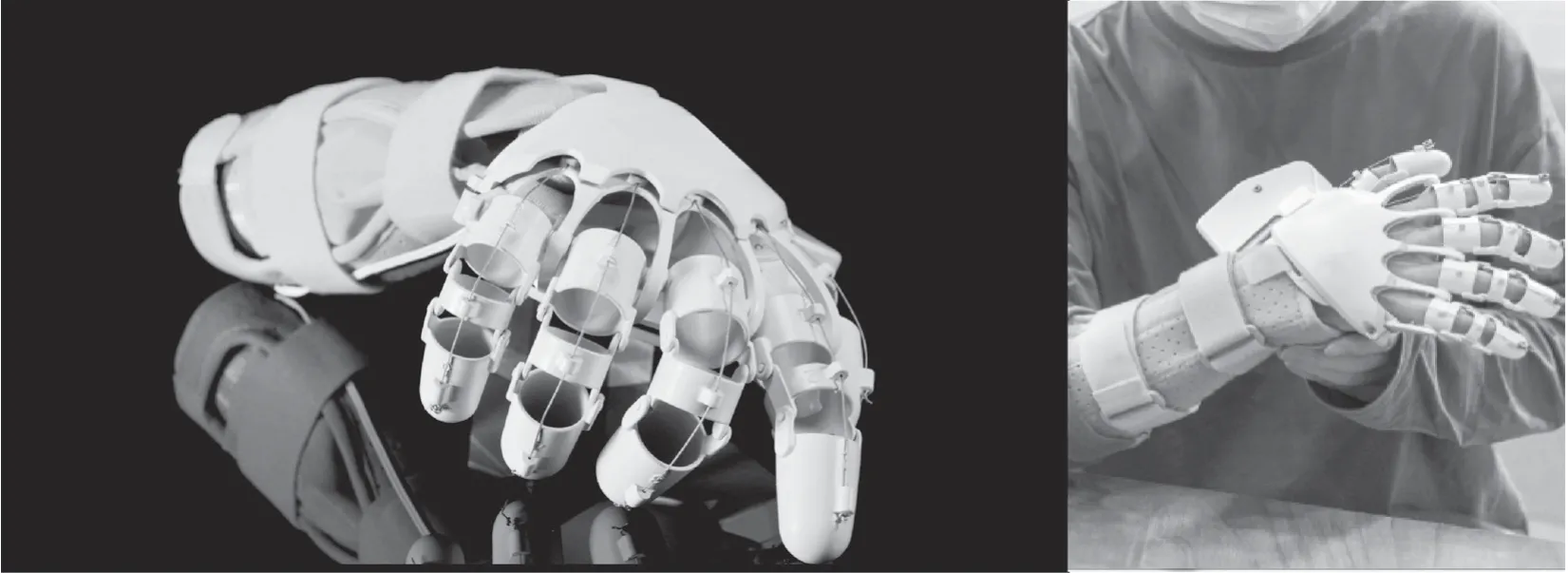
图4 实物图及穿戴效果图
3 结论
该文提出的基于柔性驱动的手指康复装置,采用单舵机驱动手指进行抓握运动,减少了电机数量,机身整体采用3D打印制作,减轻重量,利用0.5mm柔性钢丝作为动力传递的介质,设计了专用线辊传输动力,使用方式上采用可穿戴的设计,满足患者居家使用的需求,小型充电电池供电,使用过程中不受使用场景的限制,设计采用模块化的设计,各部分进行模块设计后进行装配,为脑卒中患者的手指康复过程提供一种新的康复方案。