一种即热式饮水机温度控制方案
2021-11-23包健
包 健
(厦门华联电子股份有限公司,福建 厦门 361000)
0 引言
目前传统饮水机大部分只有常温水、热水2种水温,随着生活的提高改善、生活节奏的加快以及人们对健康的追求,大家对各种水温的需求越来越多,例如泡奶、泡咖啡、泡茶等所需要的水温都不一样,这就需要有一种可即时产生各种水温的饮水机来满足大家的生活需求。该文针对传统饮水机的一些主要痛点,研究解决单一出水温度及“千滚水”问题,使用大功率不锈钢厚膜加热管将要取出的水瞬间加热至沸腾,并且利用过零检测技术,使用软件程序控制可控硅导通时间及直流水泵的出水流速,对出水温度进行精确控制,以及可调的出水温度[1]。
1 系统设计
该系统主要由显示板和驱动板构成,即热式加热相关算法主要由驱动板实现。显示板和驱动板通过UART通信,用户通过显示板上的按键选择出水温度、出水流量以及控制开始和停止出水,显示板会将用户设定的参数和开停指令发送给驱动板。驱动板接收到开始出水指令后,利用过零检测电路,使用软件控制可控硅开关时间及直流水泵的出水流速,精确控制出水温度,并将进水温度、出水温度以及实时出水流量等信息回传给显示板。
2 硬件电路设计
即热式控温的控制方案主要是通过过零调功电路控制加热管功率,通过PWM信号控制直流水泵的出水流速,两者协同工作从而调节出各种温度的水。
根据公式(1):

由于大功率加热管的电阻R可认为是固定的,故其加热功率主要由加在其两端的电压U的大小所决定,在规定时间内电功率的变化将导致加热功率的改变,因此只要能够控制交流电的有效电压Um的大小就可以控制大功率加热管的加热功率,从而达到控制出水温度的第一步。
双向可控硅过零控制波形见图1。该方案由MCU控制一定周期内可控硅导通的正弦波市电的半波个数来控制加热管两端的有效电压。因此选用具有过零截至(如图1中A点)且过零导通(如图1中B点)特性的过零调功电路来控制。该方法控制可控硅在电压过零时触发导通,导通时的波形是正弦波市电完整的正半周波或负半周波,所以不存在斩波调压方式的缺点,其负载浪涌电流和电流变化率都很小,有利于可控硅的安全工作。
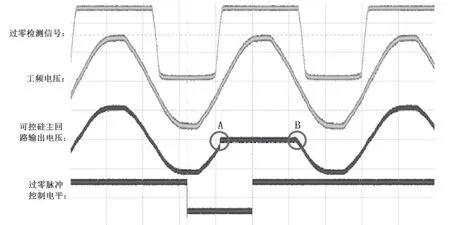
图1 可控硅过零控制信号波形图
第二步通过软件控制MCU输出PWM信号的占空比来调节直流水泵的出水流速,并控制出水温度,在相同加热功率的情况下,占空比越大,出水量就越大,出水温度就越低;占空比越小,出水量就越小,出水温度就越高。
2.1 过零检测电路
过零检测电路是将电网的交流电压通过零点的瞬间转换成MCU可以检测到的电平翻转。该方案采用光电耦合器实现过零检测,其工作原理是:交流电经分压电阻加到光电二极管上,在交流电的正半周,光耦的源 级导通/截至,光耦次级也随之导通/截至,在导通期间光耦次级输出低电平,截至期间光耦次级输出高电平,在交流电过零的瞬间,光耦次级电平发生翻转,因此光耦次级得到50Hz的方波信号,由MCU的外部中断引脚检测该信号,以检测到交流电的过零瞬间。
2.2 可控硅触发电路
可控硅控制电路中采用了过零双向可控硅型光耦,集光电隔离、过零检测、过零触发等功能于一身,避免了输入输出通道同时控制双向可控硅触发的缺陷,简化了输出通道隔离-驱动电路的结构。该方案的可控硅触发电路的工作原理是MCU在I/O口输出一个高电平,经三极管反向后,送出一个低电平,使光电耦合器导通,同时触发双向可控硅,使加热管电路导通工作[2]。
给定时间内,负载得到的功率如公式(2)所示。

式中:P为给定时间负载得到的功率;n为给定时间内可控硅导通的正弦半波个数;N为给定时间内交流正弦半波的总个数;Um为可控硅在一个电源半周期全导通时所对应的电压有效值;R为加热管电阻值。由式(2)可知,当Um,R,N为定值时,只要改变n值的大小即可控制功率的输出,从而达到调节加热功率的目的。
2.3 PWM直流水泵调速电路
直流水泵调速电路利用MOS管的通断,使直流水泵的电流随着MOS管的通断而变化,MOS管导通时,直流水泵回路导通,水泵压降为24V,MOS管断开时,直流水泵回路断开,水泵压降为0V。这样就把水泵的直流压降变成了脉冲信号,通过改变MOS管的通断状态就可以改变水泵压降的频率或者脉冲宽度,即改变了直流压降的平均值,从而达到直流水泵的调速目的。
利用MCU编程实现PWM信号,在该设计中用MCU的1个I/O口作为PWM信号的控制端。PWM采用定频调宽的方式调整水泵流速,即PWM脉冲信号的频率(周期)是固定的,通过调节MOS管G-S间脉冲的宽度(即压降为24V状态的时间)来改变PWM脉冲信号的占空比,从而改变直流水泵两端压降的平均值,这样就实现了直流水泵的调速,进而达到了控制出水流速的目的[3]。
3 软件控制算法实现
如上节所述,出水温度既可以通过控制加热功率来调节,也可以通过控制直流水泵的占空比来调节。但是加热功率的调节精度低,而且根据式(2)不难看出,加热功率除了受到n的控制外,还与电网电压有关,该产品的工作电压为191Vac~253Vac,因此难以通过控制加热功率来保证高精度的出水温度。虽然直流水泵的量化精度很高,但是受到结构的限制,水流速不能太高,水流速过低又会导致客户体验变差,用户需要等待较长时间才能接到需要的水流量。另外,在量产时,不同水泵的特性也存在差异,增加了系统复杂度。
考虑到工作电压范围宽、水流速范围窄等问题,该方案采用协同控制加热功率和水流速的方式调节出水温度。当设定出水温度后,根据事先确定的加热功率和Δt(设定温度-进水温度,下同)的关系(详见章节3.2),取当前Δt对应的n,然后使用PID算法在事先确定的范围内控制水流速进而实现调节出水温度功能。即对确定的Δt,采用定功率,变流速的方式调节水温。
3.1 出水温度、进水温度、加热功率、水流速的关系理论分析
根据热传导吸热公式:

式中:c为水的比热,为常数4200J(kg·℃);m为质量,单位kg;Tend为水吸收热量后的温度,单位℃;Tstart为水吸收热量前的温度,单位℃;Q为质量m的水温度从Tend升高到Tstart需要吸收的热量,单位J。
在该产品中,Tend=Tout,Tstart=Tin,m=vt·ρ,Q=P·t,其中Tout为出水温度;Tin为进水温度;v水流速,单位m3/s;t为时间,单位s;ρ为水的密度,可看作常数1.0×103kg/m3;P为加热管输出功率,单位W。将这些表达式带入式(3)得:

其中,c和ρ为常数;进水温度Tin在整个加热过程可认为是不变量;当用户设定出水温度后,将式(4)中Tout用出水温度设定值Tset替代,且如前所述将P设置为固定值。对式(4)化简和移项得到公式(5)。

当用户设定出水温度后,便可通过式(2)和式(5)计算出各工作电压下水流速的理论值。
3.2 水流速、加热功率和Δt的关系
为达到精确控制,且在很短时间内将水温加热到设定值,所以需要先对各个控制量的理论值进行分析。
出水流速直接影响用户体验感,出水流速太低,用户需要等待较长时间才能接到需要的水流量。通常要求出水流速需要保持在600mL/min左右。但由于加热功率有限,当Δt(设定温度-进水温度,下同)较大时,即使使用最大输出功率加热,如果不降低水流速,实际出水温度依然达不到设定值。所以采用出水流速与Δt的关系曲线。当Δt较小时保持出水流速在600mL/min,此时为了达到相应的Δt,加热管输出功率需随Δt增大而增加;当Δt较大时,由于加热功率已达最大值,需要降低出水流速来达到相应的Δt,所以出水流速随Δt的增大而减少。加热管输出功率除了与每周期导通的半波数有关外,还与电网电压有关,该方案支持的工作电压范围是191Vac~253Vac。
3.3 出水温度控制流程
当收到开始出水信号,首先通过出水温度设定值Tset和进水温度Tin计算出Δt,根据Δt和Tset的值选择加热方式。
当设定温度小于40℃,或小于当前进水温度时,则直接按600ml/min出水并实时反馈出水量给显示板,当显示板判断出本次出水量已达设定值,便会发送停止出水指令给驱动板。这一项主要是因为本产品支持的出水温度范围是40℃~95℃,当设定温度低于40℃时则直接出常温水。
当设定温度大于等于40℃,且Δt<40℃时,先根据Δt选择合适输出功率半波数,并在不出水的情况下开启加热管,直到Tout接近Tset后再开启水泵,再使用PID温度控制器通过调节水泵占比,来控制出水温度。这一点主要是考虑到用户需要用40℃~45℃的水冲奶粉等应用,用量不大,且出水温度低,如果前几秒先出冷水,则会使本次出水的整体温度可能达不到40℃,导致奶粉冲不开等。
当设定温度大于等于40℃,且Δt≥40℃时,先根据一定条件判断本次出水水温是否和上次一样,且本次出水是否和上次出水的时间间隔很近,如果满足上述几个条件,则按上次停止出水时的流速出水3s;否则,按最大出水流速出水3s。再使用PID温度控制器通过调节水泵占比,来控制出水温度。当设定温度较高时,如用户需要95℃的水,这个温度非常接近水的沸点,如果用常规的PID调温算法,很容易使水温过高而气化,进而导致喷水烫伤用户。因此前3s一边以最大流速出水一边加热,3s后温度接近设定温度后再利用PID调节器调节流速来控制出水温度。
3.4 出水流量估算
该控制器方案可以根据水泵的PWM占空比采用数学建模的方式估算出当前的水流速,再通过积分运算,计算出水流量,实时反馈给显示板,当出水流量达到设定值后,停止出水。
根据实际测量,在水温26℃的条件下,控制PWM占空比从15%~95%,按5%递增,分别测试出每个占空比对应的出水流速。用一次函数拟合折线,得出出水流速和控制信号占空比的关系如式(5)所示(v为出水流速;duty为控制信号占空比)。

出水流速除了和控制信号占空比直接相关外,还与温度、吸程、扬程等因素有关,根据实测得出,吸程和扬程对出水流速影响较小,温度大于15℃时,对流速影响也可忽略不计,而当水温低于15℃时,出水流速与温度成一次函数的关系(控制信号占空比固定的情况下)。因此,出水流速(v)与控制信号占比(duty)、温度(temp)的关系如式(7)所示。

4 测试数据
为了测试该温度控制方案的性能指标,该驱动板利用预留的UART1将进水温度、出水温度、控制水泵的PWM导通计数值等发送到电脑上,由上位机数字示波器显示出波形。通过数字示波器能够直观地看出出水温度的变化曲线,方便调整PID参数等。
使用常规PID算法测试,即在加热的同时便开启PID调节器调节温度,水泵PWM导通时间计数值(控制量)从最小值开始逐渐增加,只要选择合适的PID参数,经过几秒的振荡,出水温度很快便稳定在设定温度(80℃),但是这里存在几个问题:1)当设定温度为95℃时,前几秒的振荡会使出水温度达到沸点(一般水温超过97℃便会开始沸腾),导致饮水机喷开水,烫伤用户;2)刚开始的振荡持续时间在10s以上,而该产品要求在9s内出水温度稳定在设定温度±2℃,调节速度较慢;3)上述2个问题都可以通过调节PID参数来优化波形,使振荡的幅度降低,以及减少振荡时间。但是PID参数也是针对出水温度和设定温度的运算结果(差值、差值的微分)来计算的,因此相同的PID参数,对不同的出水温度的初始值对PID调节器的调节效果也有很大影响。
为解决常规PID调节器出现的上述问题,在刚开始加热时的前3s先以最大流速出水,之后再开启PID调节器来调节温度,经过多次实验证明,这种方式使PID调节器根据不同初始出水温度来达到相同的控制效果,既没有出现前几秒的振荡,又能够很快地将出水温度加热到设定温度。
根据测量,本次开始出水距上次停止出水的时间很接近时,加热管内的水温仍保持在设定温度附近时的温度控制波形,当刚开启加热的前3s,先以前一次加热结束时的出水流速出水,之后再用PID调节器调节水温,这样可以在5s内将温度稳定在设定温度±2℃。
5 结论
该文给出了即热式分段控温的控制方案,该方案通过过零检测电路监测交流电的过零点,通过控制每500ms导通一次的电网电压半波数来调整加热管的功率,并通过控制MCU输出PWM信号的占空比控制直流水泵的出水量,只要选择合适的加热管功率以及控制水泵使用的PID参数,就能得到稳定的不同的出水温度。该文还针对开发过程中遇到的几个实际问题提出了解决方法,最后通过实验波形阐述了该方案的可行性,实验证明,该方案能够十分精确地控制出水温度,且能够在短时间内将水温加热到设定值。该方案可解决传统净水机、饮水机所带来的单一出水温度、“千滚水”、高能耗等问题,事实证明该即热式温度控制方案是合理、节能、可靠、健康、环保、高效的,有很强的实用价值。