MR智能定位系统的研究与实现
2021-11-23卢山
卢 山
(中国移动通信集团山西有限公司,山西 太原 030032)
0 引言
随着移动互联网的迅猛发展,基于位置的服务(LBS)广泛应用于人们的工作和生活之中。由于各种各样的无线网络信号充斥于人们的工作与生活空间,因此基于无线网络信号获取用户位置日益成为的用户定位领域的热点课题[1],基于无线网络信号获取用户位置的优势在于无线网络信号具有泛在性且其部署成本较低。MR定位是较为新兴的基于移动通信网络的用户定位方法。利用MR中的用户终端接收周围小区的场强,再通过数学模型推断用户位置,其平均定位精度可达50 m~100 m。MR指纹定位算法[2]是为网络覆盖区域的每个位置建立信号特征指纹,该特征指纹即从网络角度代表用户的位置,与网络覆盖的实际位置基本存在一一映射的关系,可以获得较高的定位精度。该文以MR指纹定位技术为基础,赋能一个基于最小化路测( Over The Top, OTT;Minimization of Drive-Tests,MDT )训练数据的在线学习系统,研究与构建了一套具备在线学习能力的MR定位系统。MR智能定位系运行过程中可以实现对指纹模型参数、指纹模型参数自适应工参变化以及定位算法参数进行自学习的功能,以弱化网络变化或者无线环境变化对定位性能的影响。
1 基于移动网络的用户定位技术概述
移动通信网络无处不在,只要用户终端进行通信,就会产生信令数据,而且可以零成本获得这些信令数据。正是由于移动网络及数据具有泛在性和低成本性的特点,因此研究基于移动网络的用户定位成为获取用户位置的热点课题。OTT/MDT数据是一种带有经纬度坐标的消息(下文为位置消息),当用户终端执行辅助全球卫星定位系统(Assisted Global Positioning System,AGPS )业务、MDT业务或者导航业务时,会产生这类消息。MR是信令消息的一种,是用户终端在执行通信过程中周期性或者在事件触发时上报给网络的消息,其不仅包括时间、小区以及用户标识信息,而且包括主服务小区和相邻小区的场强信息。
2 MR指纹定位系统
2.1 训练MR数据
OTT/MDT数据不仅包括时间、小区以及用户标识信息,而且包括用户的位置信息。该定位方法虽然只覆盖极少数的用户,但是能够满足指纹训练的需求。
基于时间、用户标识、服务小区标识、MMEUeS1APId(4G)或者AMFUENGAPID(5G)将OTT/MDT与MR进行关联,生成带位置坐标的MR数据,将其作为定位系统的训练MR数据。
2.2 栅格指纹库
指纹(Fingerprint,FP)是对特定位置信号特征的刻画,不同位置指纹的差异是指纹定位的基础,一个指纹一般由一个或多个信号特征模型(下文称为Finger)组成。
栅格指纹利用栅格区域代表一个位置区域,栅格尺度为10 m×10 m,采用混合高斯模型(Gaussian Mixed Model,GMM)来描述栅格指纹。考虑到信号量(例如参考信号接收功率: Reference Signal Receiving Power,RSRP)在测量过程中会存在噪声误差(即在同一个位置信号量不是一个不变值,而是叠加了噪声),因此该技术方案采用高斯分布N(μ、σ2)对Finger进行描述,其中μ是信号量的平均值,σ2是信号量的方差,即对训练数据中的每一个无线网络信号的信号测量值进行高斯处理。
采用GMM模型来刻画栅格指纹的原因是一个栅格中的MR信号量分布往往并不接近高斯分布,例如一个栅格中可能存在室内和室外两类训练MR数据。该技术方案默认混合高斯模型的分量为2个(也可以设置更多,具体看实际的信号复杂程度)。
混合高斯指纹模型如公式(1)所示,包括2个高斯分量的高斯指纹。
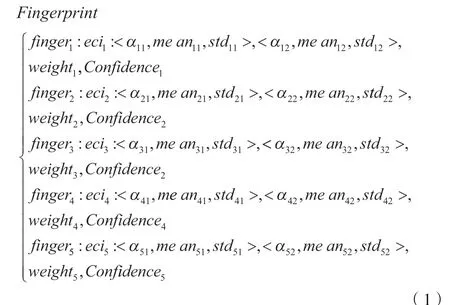
式中:fingeri为栅格指纹的第i个手指(Finger);menanij代表fingeri的第j个高斯分量的平均值;stdij代表fingerj的第j个高斯分量的标准方差;αij为每个高斯分量在混合高斯分布中所占的比重,;weighti为 每 个finger在Fingerprint中的权重,即对应RSSI出现次数的归一化值,且;Confidence1为finger的置信度,在指纹库健康性监测时会用到Confidence1,便于了解指纹库的可靠性。
在生成混合高斯模型栅格指纹的过程中,首先,根据训练MR数据位置信息将MR数据映射到对应的栅格;其次,通过期望最大化(Expectation Maximization Algorithm,EM)算法对栅格中的MR信号量进行分类,每类信号量分别生成对应的高斯分量参数,即生成了混合高斯栅格指纹。
2.2 MR指纹定位算法
MR指纹定位算法就是指纹匹配算法,主要采用朴素贝叶斯估计算法计算某MR在栅格中的概率值,取概率值最大的栅格,即为该MR所在的栅格位置,如公式(2)所示。

式中:P(MR)是边际概率;P(GridA)为先验概率;GridA代表栅格A;P(MR|GridA)为似然函数,表示在已知栅格A的情况下,最可能出现MR的概率。
例如,下面是数据集中的第i个MR数据。

其中ecij和RSRPij分布是MRi的第i个小区标识和第j个信号场强。
由于混合高斯分布的形式如公式(3)、公式(4)所示。
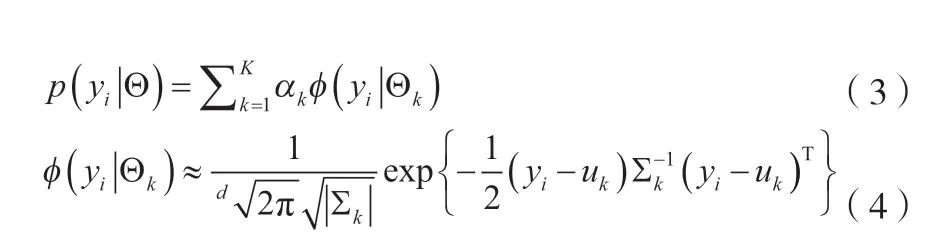
式中:αk为每个高斯分量在混合高斯分布中所占的比重,;Θk为第k个高斯分量的参数;yi为第i个RSRP值;uk为第k个高斯分量的均值;∑k为第k个高斯分量的协方差。
综上可计算得P(MR|Gridi)(i=A,B,…)各个栅格的概率值,选取后验概率最大的栅格,即为该MR的位置。
3 在线学习机制
3.1在线学习系统架构
基于OTT/MDT MR训练数据的在线学习系统架构图如图1所示。
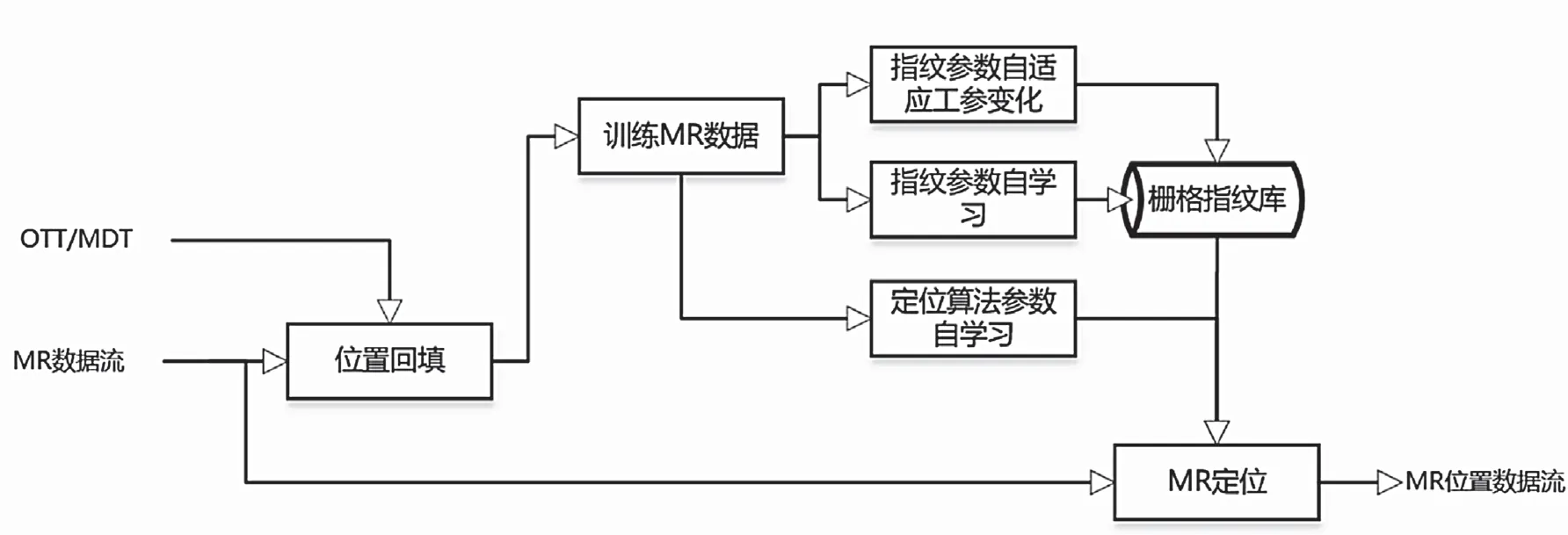
图1 基于OTT/MDT MR训练数据的在线学习系统架构图
其中位置回填是将OTT/MDT中的位置数据与MR中的信号场强信息进行关联,生成训练MR数据。
生成训练MR数据后可以实现指纹参数自适应工参变化、指纹参数自学习以及定位算法参数自学习的功能。
3.2 指纹参数自学习
利用训练MR数据对指纹参数,即每个Finger的GMM参数(每个分量的平均值、标准方差和分量权重)进行训练。
由于不同类型的MR数据的可靠性不同,因此可以设置不同的权重因子来对数据进行区分,然后融合生成指纹。
考虑无线传播环境是会变化的,网络也是会变化的,因此MR收集时间距离定位时间点的时间越长,有效性越低,MR也需要用权重来区别。
为了简化算法,且便于维护与优化,只通过时间权重来区分2类数据(过往数据权重及本期数据权重)。初次构建指纹库时,只有本期权重,即权重为1。
利用收集的训练MR数据更新现有的GMM指纹的过程如下。
现假设某栅格号A有n条训练MR数据,而现有的数据是以某小区eci1为主小区的所有MR数据,所以该栅格A内可能有多条MR数据,但主小区均为eci1。数据如下。

现提取该栅格内的所有小区及其对应的电平(RSRP),得到的数据如下。
将历史生成的上述电平数据以文件的形式保存下来,与新收集的电平数据合并,利用混合高斯分布生成每个finger的混合高斯指纹。
3.3 指纹参数自适应工参变化
新建站、扩容以及PCI规划等日常网络运维会导致工程参数处于动态变化中。工程参数的变化会对指纹造成直接影响,导致前期生成的栅格指纹不能准确反映当前的网络覆盖情况,甚至使栅格指纹完全失效。
因此,需要通过自学习算法让栅格指纹库快速、自动地适应工程参数的变化,时刻为MR指纹定位提供一个可靠、准确的指纹信息。
栅格指纹自适应更新。栅格指纹中的某ECI对应的小区工程参数发生变化,则ECI对应的Finger自动进行修正,以补偿该变化,具体实现算法如下。
Finger中的指纹是由GMM生成的均值(mean)、方差(variance)和分量权重(prior)组成的。为了便于指纹更新,其附带了生成指纹的中间结果
3.4 栅格指纹老化处理
最新的训练MR数据更能够反映当前的位置信号特征,因此为了保证新的训练数据以较高的权重参与生成指纹的过程,旧数据随着时间的流失在指纹生成中的效用也逐渐降低,在指纹生成中采用老化系数来对新旧数据进行加权处理,如公式(5)所示。

式中:α为老化系数,α=0~1;Countn-1为该次指纹更新之前积累的 MR 个数。Countn为该次与之前通过老化处理后合并的MR个数。
3.5 定位算法参数自学习
该方案指纹匹配算法采用的是朴素贝叶斯()算法,其本身由最大似然、先验概率和边缘概率组成。该方案对先验概率进行改造,构造了均衡函数以控制先验概率对匹配结果的影响。下文介绍使用训练MR数据对贝叶斯模型进行训练的过程。
3.5.1 先验概率自学习
影响贝叶斯模型匹配效果的参数主要是公式(6)中先验概率P(MR|GridA),该算法通过设计弱化函数对其进行均衡处理(弱化处理)。

说明:由于P(MR|GridA)本身是位于区间[0,1]的数值,因此通过将index设置为[0,1]可以弱化其对计算概率的影响,同时通过控制index的大小可以控制其弱化程度。
考虑到不同指纹Finger个数对先验概率的要求不同,因此需要分别对不同Finger的MR进行训练。首先,设置目标函数。目标函数是根据对该平台性能平均的指标来确定的,设置为实际位置与定位位置偏差≤100m的占比。每次迭代时,仅对index、index+0.1以及index-0.1设置值进行比较求最佳。
3.5.2 缺省标准差
对于小区ECI对应的RSSI集合不能满足构建Gauss模型的情况,通过赋值缺省Default Gauss Variance建立Gauss模型。可以对该ECI其他栅格的Gauss Variance进行加权平均得到,权值设为栅格距离的倒数。当训练MR数据累积到一定门限(例如20个RSSI值)时,自动切换到标准高斯模型参数求解过程。
4 MR智能定位系统的应用
将MR智能定位系统投入山西移动日常生产中。下面是利用2019年4月和5月的定位结果对定位算法性能进行评估。选择具有道路、居民区、商务区以及城中村等场景在内的30 km2区域进行算法测试。
MR智能定位系统的在线学习能力通过自动调整系统参数来适应数据和网络环境的变化,在系统运行中具有提升定位精度和稳定性的作用。
5 结语
基于移动网络进行用户定位的挑战在于移动网络的自身变化和无线环境的变化都存在较大的不确定性,难以保证定位精度和定位性能。该技术方案构建的 MR智能定位系统以建立GMM栅格指纹库并利用朴素贝叶斯指纹匹配算法作为MR定位的基础算法。在该基础上,利用在线获得的训练MR数据对指纹参数和朴素贝叶斯定位参数进行在线训练,确保算法模型参数能够真实反映无线网络自身的变化和无线网络环境的变化,从而保证MR定位具有较高的精确性和稳定性。