改进自适应遗传算法在多载AGV调度的应用研究
2021-11-22张承瑞孙玉玺
刘 畅,张承瑞,孙玉玺
(山东大学 机械工程学院,济南 250061)
(山东大学 高效清洁机械制造教育部重点实验室,济南 250061)
1 引 言
随着工业4.0时代的智能工厂的引入,工厂规模越来越大,对自动导引运输车(Automated Guided Vehicle,AGV)的需求量变大,调度复杂性增加,AGV调度机制应该更加高效、鲁棒.
现在已经有很多学者对多AGV调度进行研究.Valerio Digani,M.Ani Hsieh等[1]提出一种优化策略,来最大化AGV的吞吐量;Bai Li,Hong Liu,Duo Xiao等人[2]提出一种集中式多AGV运动规划方法,计算效率更高.但是,国内外研究的多AGV路径规划问题大多数是基于单负载,对多负载AGV的研究较少.
Azimi等[3]较早的研究了多载AGV调度需要解决的问题.Ho Y-C,Chien S-H研究多负载AGV的相关问题[4],并且重点研究了多负载AGV的提取分配原则[5].霍凯歌等[6],已经对自动化集装箱码头中的多载AGV调度问题进行研究,他们发现,多载AGV比单载AGV效率更高.Li-xiang Zhang等[7]研究了在自动化汽车装配线环境下,多载AGV高效运输物料的问题,并使用遗传算法进行求解.Li-zhen Du等[8]研究了在纺织车间环境下,多载AGV运输物料的问题,并且使用混合遗传算法和粒子群算法进行求解.
随着任务的维数增加,传统算法求解的时间复杂度大.所以,国内外很多学者使用智能算法(如头脑风暴算法[9]、粒子群优化算法[10])来对多AGV调度问题进行求解.
上述论文中,大多只是简单的假设多载AGV运输1个或2个负载,只考虑负载重量的约束,却没有考虑负载的体积约束.
本文第2节描述多载AGV调度问题的环境,第3节对路径规划问题进行建模,第4节对初始数据进行预处理之后,使用改进的自适应遗传算法进行求解,第5节将改进的自适应与标准遗传算法和自适应遗传算法进行比较.
2 问题描述
对于工厂的物料运输问题,在传统的单载AGV模型中,不需要考虑体积、重量约束,只是将一种物料运输到目的地,一次只执行一个任务.这极大的浪费了AGV的负载能力.
如图1所示,AGV没有任务时,会停靠在充电区域(charge area),进行充电或者待机.任务集合发布时,AGV从充电区域(charge area)来到仓库(warehouse).在不超过AGV体积、重量约束的条件下,根据调度算法求解得结果进行加载货物,然后正式开始运输货物.在图1的多载AGV运输物料示意图中,AGV可以根据任务需求自由地到达任意一点.当AGV负载为空时,会返回仓库(warehouse)进行下一个任务的运载.周而复始,直到所有任务完成后,AGV会回到充电区域进行充电或者待机,直到下一个任务集合的到来.
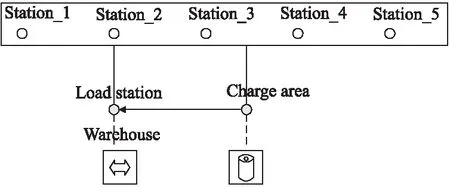
图1 多载AGV运输物料示意图
3 建立模型
本文主要解决的是工厂环境下如何高效调度多载AGV的问题.
3.1 符号说明与模型假设
符号说明
M:表示路径规划的路径数目;
Ni:表示在规划的第i路径中,执行任务点的数目;
cij:表示在规划的第i条路径中,从仓库出发到第j个任务点所产生的成本;
Gij:表示在规划的第i条路径中,第j个任务点所需要的物料的重量;
G:表示多载AGV可承受的最大重量;
Vij:表示在规划的第i条路径中,第j个任务点所需要的物料的体积;
V:表示多载AGV可承受的最大体积;
Aijk:表示第k个任务是否在第i条路径的第j个任务点被执行;
K:表示任务总数目;
d_list:表示只能被单个运输的任务点形成的路径;
dd_list:表示被最短路径模型求解后得到的路径集合;
p_list:表示d_list和dd_list两个集合的并集.
模型假设
1)单个任务的负载不会超过多载AGV的最大载重约束和体积约束;
2)AGV行驶单位长度,成本相同;
3)AGV匀速行驶.
3.2 调度模型
目标函数:
(1)
约束函数:
(2)
(3)
(4)
(5)
公式(1)为模型的目标函数,为距离函数矩阵,表示路径的成本;公式(2)为多载AGV的重量约束;公式(3)为多载AGV的体积约束;公式(4)、公式(5),约束任务能且只能被一辆多载AGV完成.
4 改进的自适应遗传算法
遗传算法[11]实现简单,通用性强,易于和其它算法结合,具有并行性和鲁棒性.但是,它也存在过早收敛、局部搜索能力弱等问题.
针对标准遗传算法的上述不足,本文在自适应遗传算法的基础上,加入灾变操作与逆变操作,提出一种改进的自适应遗传算法(Improved Adaptive Genetic Algorithm,IAGA),如图2所示,其为改进自适应遗传算法的流程图.
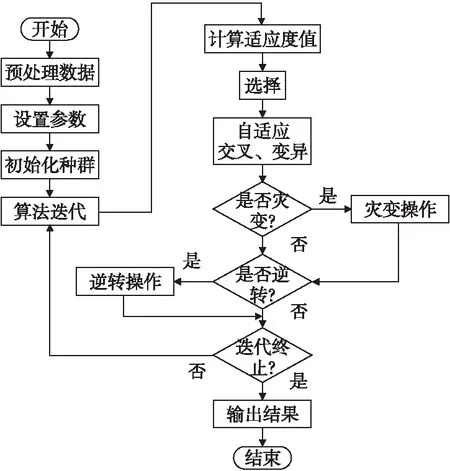
图2 IAGA流程图
在初始化种群后,算法进入迭代部分,进行选择、交叉、变异操作.
然后进入灾变操作,根据适应度值,求解灾变算子,判断是否执行灾变操作,灾变算子随着陷入局部极值迭代次数的增加,不断的增加种群的交叉概率和变异概率,使算法更容易跳出局部极值.
之后,进入逆转操作,即局部搜索部分.当满足逆转条件后,进入逆转操作.在逆转操作中,添加了倒序操作与插入操作.选取种群的部分染色体,根据倒序概率和插入概率,判断是否进行倒序操作或者插入操作,执行完毕后,将操作后的染色体的适应度值,与操作前的适应度进行比较.适应度值变大时,才会接受新解.算法将沿着适应度变高的方向进行进化.
最后根据迭代终止条件(迭代次数或者收敛),判断是否终止迭代.
4.1 适应度函数
目标函数为最小路径.为了方便编程和简化智能算法的迭代过程,本文使用惩罚函数的方式,将重量的约束与体积约束,加入到成本函数中.适应度值为成本的倒数,成本越大,适应度越小.适当调整α,β的值,满足各个AGV的载重约束和体积约束.
(6)
(7)
4.2 自适应策略
自适应交叉算子、变异算子
本文采取文献[11]中,正弦自适应遗传算法的遗传算子的求解公式.
(8)
(9)
其中,pc为交叉概率;pm为变异概率;pc1为种群的最大交叉概率;pc2为种群最小交叉概率;pm1为种群的最大变异概率;pm2为种群最小变异概率;fm为种群的最大适应度;fa为种群平均适应度;f′为染色体个体适应度;
自适应遗传算子随着适应度的变化而不断变化,可以很好地提高遗传算法的收敛速度和性能.
自适应灾变算子
传统的灾变算子是固定值,导致对每个算例的适应性不强,需要不断调整.
本文提出一种自适应灾变算子,它随着陷入局部极值的代数的增加,不断增加交叉概率与变异概率,使整个种群跳出局部最优解.

(10)
(11)
(12)
(13)

灾变算子的自适应调整,如图3所示,在算法迭代初期,种群适应度急剧变化阶段,不会发生作用.在种群陷入局部极值后,随着陷入极值的时间越长,灾变算子使得交叉概率和变异概率不断增大.

图3 灾变阶段交叉概率、变异概率变化量
自适应逆转算子
本文提出一种自适应逆转算子,随着总迭代次数的增加,逆转算子不断改变,使得种群进行逆转操作的概率增大.
(14)
其中,Pi为执行逆转操作概率;Pim为最大逆转概率;T为迭代周期;ite为迭代次数.
如图4所示,在算法的迭代初期,种群的多样性大,不需要过多的进行逆转操作.在算法的后期或者迭代陷入局部最优值时,适当的进行逆转操作,既可以增加种群的多样性,也有利于跳出局部极值.而且,逆转操作使得种群向着更加有利的方向进行进化,容易跳出局部极值.
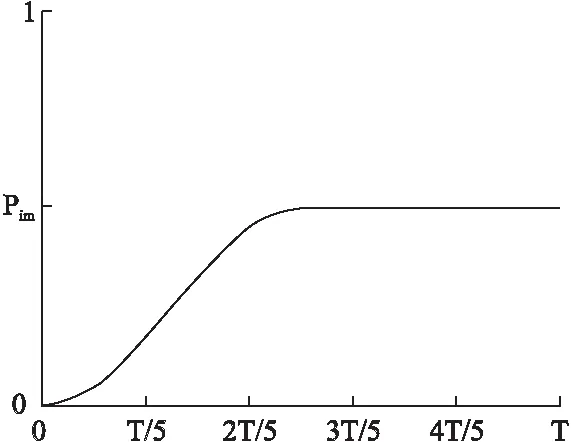
图4 逆转操作概率的自适应调整
4.3 算法基本流程
4.3.1 数据预处理
1)剔除重量大或者体积大的任务
分析所有任务点需要的物料的重量与体积,删除重量很大或者体积很大、无法与其他物料进行一起运输的物料订单.这样的物料只能单载运输.形成单载AGV路径集d_list.之后,智能算法求解多载AGV路径集合dd_list.
剔除重量大或者体积大的任务,将其组合成单独的任务队列,可以减少调度系统的搜索的维度,使得算法求解的效率更高,速度更快.
2)根据数据提供的x坐标与y坐标,计算直线距离,提前生成距离矩阵,避免在程序计算中重复计算,降低程序的计算量.
4.3.2 调度模型求解
编码与解码
采用实数编码的策略.常见的二进制编码虽然简单易行,不适合高维、高精度优化问题.这里采用实数编码.
仓库的编码:0,分割各个字符串.例如:任务点1-4为一组,6-9为一组,11-14为一组,编码后的染色体的编码字符串,1-2-3-4-0-6-7-8-9-0-11-12-13-14,这就是编码过程.解码过程则相反.
选择
本文采用轮盘赌选择方式.根据每个个体的适应度,按照比例进行概率选择.适应度越大的染色体被选中的概率越大,反之,适应度越小的染色体被选中的个体越小.
交叉、变异
采用两点交叉方式.随机选中小于染色体编码长度的两个数,将它与临近的染色体相同位置进行交换.但是由于采用的是实数编码.所以,交叉操作完成之后,相应的染色体内部,需要进行调整.
采用单点变异的方式.因本文采用的是实数编码,所以单点变异后,需要进行调整.
逆转
选出部分种群,根据设定好的概率(倒序概率,插入概率),使用逆序排列,插入排列的方式,保留适应度值增大的染色体,否则恢复大原基因排列.这样做的目的,一是增加种群的多样性,二是可以向着种群适应度值高的方向进化.
调整
因采用实数编码,除0外的其他实数应保持数字的唯一性,当进行交叉变异等操作后,需要进行调整,来满足染色体数字的唯一性.
5 仿真验证
本文的实验环境为:Windows 10+MATLAB 2014b.本文的算例由Solomon[12]提出的算例调整修改而来,任务数据包括位置,重量约束,体积约束初始任务数据包括位置,重量约束,体积约束.搭建了一个仓库点,(N-1)个工作站,在共N个点的环境.多载AGV能承受负载的最大重量为4,多载AGV能承受负载的最大体积为4.
分别在N为30,60,90 3个规模下,各做10组实验,取得3种规模下,改进的自适应遗传(IAGA),标准遗传算法(Standard Genetic Algorithm,SGA),自适应遗传算法(Adaptive Genetic Algorithm,AGA)算法,3种算法收敛的迭代次数、迭代时间、迭代精度.
分析图5可知,在相同的迭代次数下,改进的自适应遗传算法比标准遗传算法、自适应遗传算法收敛速度更快、更加接近最优值.
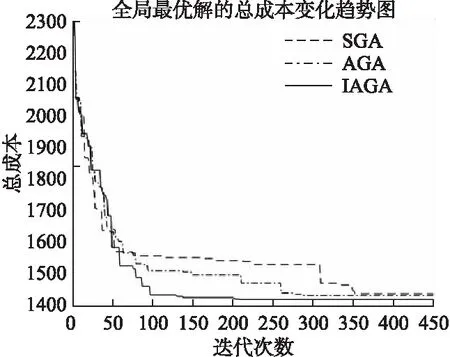
图5 N=30,各个算法迭代变化趋势
由表1-表3,比较3种算法在N=30,60,90维度下的的迭代次数、迭代时间、收敛解,可知,改进的自适应遗传算法迭代次数更少、达到收敛的时间更短,收敛解更加接近最优解.
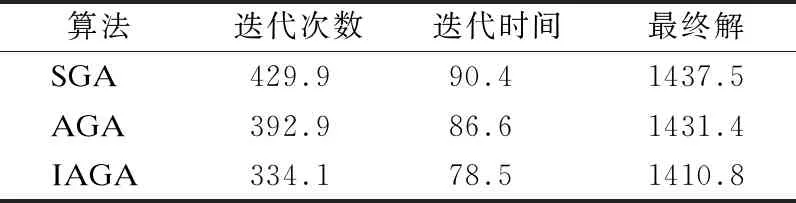
表1 N=30,各个算法比较
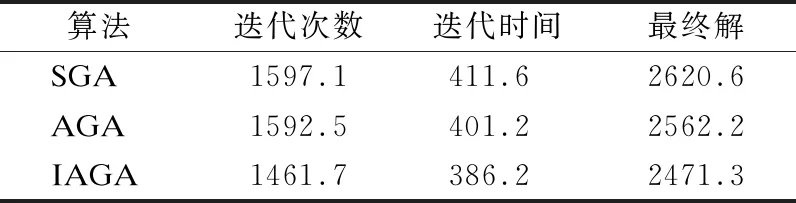
表2 N=60,各个算法比较
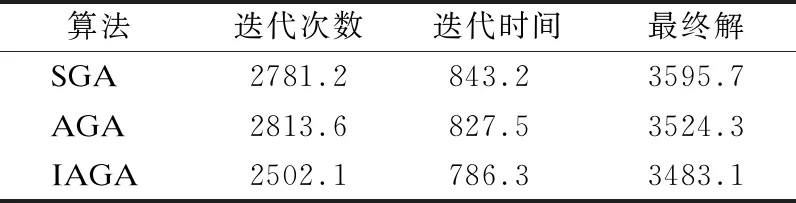
表3 N=90,各个算法比较
6 结 论
本文中,多载AGV调度问题是一个添加了物料体积、重量双重约束的VRP(Vehicle Routing Problem,车辆路径规划问题)问题.本文首先对数据进行预处理,降低求解变量的维度,然后使用改进的自适应遗传算法(IAGA)进行求解,最后,分别在数据维度N=30,60,90时,进行多组实验取平均值.与标准遗传算法(SGA)、自适应遗传算法(AGA)相比,改进的自适应遗传算法收敛快,优化效果明显,收敛精度高.
在求解过程中也发现一些不足:1)在任务合并寻优过程中,迭代时间长,可以进一步改进算法或者调整参数来进行加快收敛;2)本文没有考虑时间约束,在后续工作中可以加入时间窗约束.
