变极矩长初级双边直线感应电机控制分析研究*
2021-11-19刘希军朱新宇刘小涵
刘希军 崔 哲 朱新宇 刘小涵
中国民用航空飞行学院,四川 广汉 618307
0 引言
随着日趋成熟的控制技术和电力电子技术的发展,以直线电机为驱动核心的电磁驱动系统逐渐成为舰载机加速的主要驱动系统。电磁驱动技术主要将电能转换为电磁能,进而转换为舰载机的动能,完成弹射驱动过程。电磁驱动系统推力输出控制精度高,能量输出及运行效率高,易于维护且维护费用较蒸汽式驱动系统低[1]。
直线感应电机式电磁驱动系统的核心,也是驱动动力来源[2-3]。直线感应电机无中间转换装置,可以将电能直接转换成电磁推力输出,驱动过程减小机械接触,减小机械摩擦阻力,电机部件散热面积大,利于散热。直线感应电机驱动系统简单可靠性高,且更易于维护[4-5]。
传统型的直线感应电机在运用于驱动系统时,通常采用控制电流频率的方法控制电磁推力的输出[6-7]。随物体运行速度的增大,电源频率逐渐增大,能量损耗也逐渐增高。对于舰载机弹射而言,其需要在短时间内获得较高的动能,驱动时间很短,控制方式更为复杂化。因而提出一种极矩变化型长初级双边直线感应电机,根据舰载机弹射指标要求设计直线电机极矩值,舰载机驱动过程采用恒压恒频电源驱动,电流频率保持不变,减小能量损耗,优化控制方式。
1 弹射指标及电机结构分析
舰载机电磁加速驱动要有在有限长的距离内将舰载机加速到一定的速度值,完成舰载机起飞速度基本要求。假设舰载机及其载荷的总质量为25000kg,弹射轨道距离100m,舰载机加速末速度至少100m/s。假设舰载机为匀加速过程,则根据运动学公式可知,在加速的2s内,舰载机加速度至少为50m/s2。若忽略空气阻力及摩擦力的影响若忽略空气阻力及摩擦力的影响,假设仅由直线感应电机提供驱动力,则变极距长初级双边直线感应电机至少提供1.25MN推力输出。舰载机完成弹射任务后,直线感应电机的次级动子减速制动,可改变电流方向,使驱动力为制动力,完成直线感应电机次级动子减速任务。舰载机驱动技术指标如表1所示。

表1 舰载机驱动主要技术指标
传统型直线感应电机极距固定,弹射驱动过程通过改变电流频率控制直线感应电机输出电磁推力恒定。舰载机的弹射时间仅为2s,驱动控制较难以实现,因而采用变极距直线感应电机完成弹射驱动。变极距长初级双边直线感应电机在电机加工时,根据弹射指标要求,在电机不同初级位置处,采用数控机床加工不同极距。变极距长初级双边直线感应电机极距变化示意图如图1所示。

图1 变极距长初级双边直线感应电机示意图
变极距长初级双边直线感应电机通常采用无齿槽结构,可以有效减小齿谐波影响[8-9]。舰载机弹射过程中保持电流频率不变,随着舰载机加速过程速度的增加,需要设计直线感应电机极距增大,才能保证电磁推力输出恒定,进而确保舰载机的弹射任务顺利完成。
舰载机弹射轨道即直线感应电机初级定子长度100m,次级动子长度远小于初级定子长度,因而电机漏感值大,电源电压利用效率低。因此,在弹射过程中初级绕组采用分段提供电能的形式增强电源电压利用率,电机绕组通电示意图如图2所示。

图2 变极距双边直线感应电机通电示意图
2 变极距电机等值电路分析
分析长初级双边直线感应电机时,常将初级绕组分为有效和无效2个部分。初级绕组区域覆盖电机次级铝板的部分为有效部分,完成能量的转化,等效电路中由有效部分阻抗表示;未覆盖次级铝板的部分为无效部分,等效电路中由无效部分阻抗表示,不起能量转换作用。采用等值电路分析方法分析变极距直线感应电机在恒压源驱动时的性能,并考虑端部效应对直线感应电机影响的T型等效电路如图3所示。
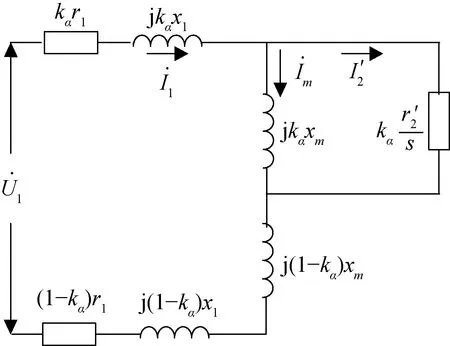
图3 变极距直线感应电机等值电路

由于直线感应电机采用分段供电模式,因而初级绕组有效长度随极距τ变化而变化,比值kα和极距τ相关联。本设计中,变极距直线感应电机额定极距值为0.3m,次级极对数p=6时的次级长度值为3.6m。分段通电时需分段设计电机次级对应极对数,以保证电机初级绕组完全覆盖次级铝板。
极距值小于额定值,次级极对数取值8,极距值大于额定值,次级极对数取值6。比例系数kα为:
(1)
(2)
(3)
式(2)中,kr1为电阻增长系数,简化分析kr1=1,ρa为导线电阻率,W1为初级绕组串联匝数,lav为绕组半匝长度,S1为绕组导线截面积。
式(3)中,f为电源频率,lδ为初级铁心叠厚,p为次级极对数,q1为每极每相槽数。
(4)
(5)
式中,m1为电机相数,2d为次级厚度,μ0为空气磁导率,δe为电磁气隙。
3 直线感应电机动态模型建立
以变极距直线感应电机等值电路为基础,结合q-d-0坐标系,建立变极距长初级双边直线感应电机动态模型,分析恒压恒频电源提供电能时,直线感应电机动态特性。
选择静止q-d-0坐标系,忽略0轴分量,建立变极距长初级双边直线感应电机电压方程。
直线电机初级电压方程:
(6)
(7)
直线电机次级电压方程:
(8)
(9)
式中,ωr为次级速度对应电角速度:
(10)
建立变极距长初级双边直线感应电机磁链方程。
直线电机初级磁链方程:
(11)
(12)
直线电机次级磁链方程:
(13)
(14)
直线电机励磁磁链方程:
(15)
(16)
直线电机初级电流方程:
(17)
(18)
直线电机次级电流方程:
(19)
(20)
舰载机弹射过程忽略空气阻力及摩擦力作用,舰载机无主动力输出,弹射动力由直线感应电机提供,则根据牛顿定律可知:
(21)
忽略谐波磁场推力影响,基波磁场产生电磁推力输出,则q-d-0坐标系下,电磁推力输出为:
(22)
电机输入有功功率和无功功率分别为:
(23)
(24)
电机总功率为:
(25)
电机功率因数和机械效率分别为:
(26)
(27)
4 直线电机恒频控制仿真分析
根据q-d-0坐标系下建立的电压方程,电流方程和磁链方程,结合直线电机设计参量,建立控制仿真模型,仿真分析变极距直线感应电机的运行控制特性。变极距长初级双边直线感应电机主要设计参量如表2所示。
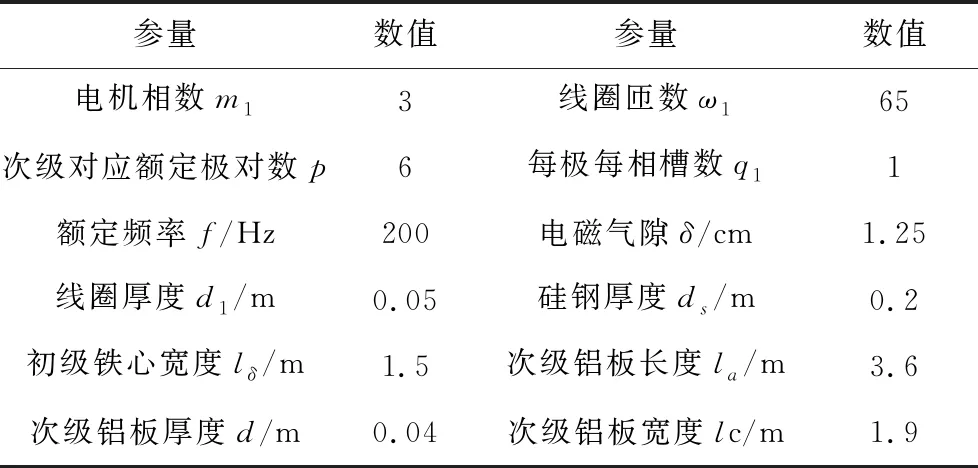
表2 舰载机驱动用直线电机设计参量
变极距长初级双边直线感应电机控制仿真模型主要由电压模块、磁链模块、电流模块和运动学模块4个部分构成。
电压模块将三相交流电压从abc坐标转换
(28)
(29)
(30)
用三相桥式电路、三相电压电流测量模块和三相RLC系列模块产生仿真电路的三相交流电。磁链模型将电压、电感和励磁磁链相联系,并采用磁链和电感表达式表示电流模块。
变极矩直线感应电机的控制方式采用恒频控制方式。忽略空气阻力影响的情况下,保证舰载机载加速过程中电磁推力输出恒定,即加速度恒定,速度增量由加速度和时间值求取。电机极矩值逐渐增大,将极矩的变化转换为相宽度的变化,相宽增加值恒定。输出值为桥式电路的控制输入,使直线感应电机输出恒定的电磁推力值。
仿真分析变极距直线感应电机运动特性,分析电磁推力输出和负载运行速度随时间变化分别如图4~5所示。

图4 加速过程电磁推力曲线图
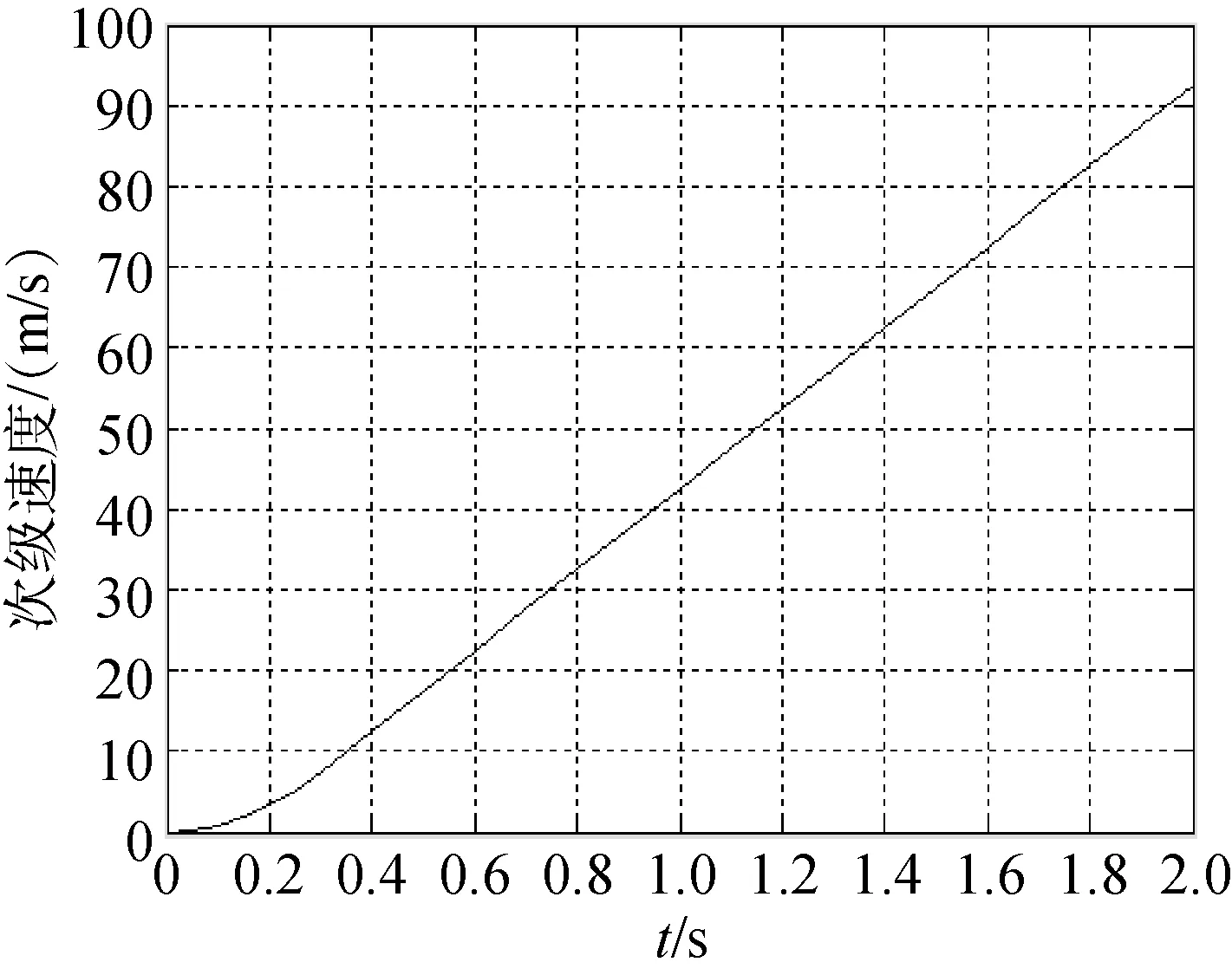
图5 加速过程速度曲线变化图
在电磁弹射加速过程,将电流频率恒定在300Hz,变极矩直线感应电机极距等比例增加,电磁推力在0.6s时增加到1.25MN,并稳定在1.25 MN电磁推力输出。变极矩直线感应电机功率因数和能量效率仿真分析曲线分别如图6~7所示。

图6 加速过程功率因数变化曲线图

图7 加速过程能量效率变化曲线图
电磁推力输出恒定后,变极矩长初级双边直线感应电机功率因数恒定在0.45,效率值随弹射过程逐渐增大,在弹射后半段可达75%,传统蒸汽弹射系统效率约5%左右,变极矩直线感应电机驱动的电磁弹射系统具有明显的能耗优势。
传统的直线电机控制通常采用恒压频比控制方式,为精确控制需要实时检测反馈速度和位移信号[10-12]。而变极矩直线感应电机采用恒频控制,电压和电流频率值恒定,控制方式得以简化,但同样可以实时检测速度和位置信号,增加闭环反馈环节,增强控制系统的可靠性和稳定性。
本系统所设计的变极矩直线感应电机的极矩值是按照常规舰载机弹射载重25000kg设计,极矩参量在电机设计加工时已确定,可完成常规舰载机弹射任务。但实际弹射过程中,舰载机的载重有可能会发生变化,而空气阻力也会对弹射过程产生影响,可通过控制电流大小控制电磁推力输出,完成弹射加速任务。
由牛顿定律可知:
Fem-Ff=Ma
(31)
直线感应电机电磁推力输出Fem可表示为:
(32)
式中,2a为电机初级铁心宽度,L为次级铝板长度,J0为电流密度,B0为磁感应强度,s为滑差率,G为品质因数,可表示为:
(33)
式中,σs为次级导体面电导率,ω1为初级绕组相串联匝数,δe为有效电磁气隙。
舰载机所受空气阻力Ff可表示为:
(34)
式中,C为空气阻力系数,ρ为空气密度,S0为舰载机迎风面积,v为舰载机与空气相对运行速度。
因而在电机极矩设定后,通过控制电流可控制电磁推力输出,实现舰载机的加速,因而整个弹射过程电流大小为:
(35)
分析弹射过程电流变化情况如图8所示。
图8 加速过程绕组变化曲线图
舰载机的弹射过程依次为加加速过程和恒加速过程,加加速时间0.4s,电磁推力输出恒定后进行恒加速过程,并在2s内达到100m/s的舰载机起飞初速度,绕组电流随速度近似成线性变化。
分析弹射过程舰载机的载荷量,以及表面积所影响的空气阻力系数和绕组电流关系如图9~10所示。

图9 载荷质量对绕组电流影响曲线图

图10 阻力系数对绕组电流影响曲线图
绕组所需电流量和舰载机的载荷质量成正比,载荷量越大,所需电流越大,不同的载荷量可通过推导出不同的线性增长的绕组电流变化完成电磁推力输出的控制。舰载机受到的空气阻力和阻力系数成正比,阻力系数和被弹射物体迎风面积和光滑程度等因素相关,线圈绕组电流大小和空气阻力系数成正比例关系。
5 结论
建立变极矩直线感应电机等值电路,根据等值电路及q-d-0坐标系,建立变极矩直线感应电机的动态仿真模型。分析在恒压恒频电源下,直线感应电机的动态特性。分析在载荷量变化和考虑空气阻力的情况下,绕组电流大小变化的状态,以满足舰载机完成弹射加速指标任务。
设计提出的变极矩长初级双边直线感应电机较传统型直线感应电机而言,极矩在初期设计加工时按照舰载机预设弹射指标要求,随弹射位置的增大逐渐增大。传统型的直线感应电机通过控制电流频率控制电机推力输出,在高速时电流频率增大,逆变器开关频率受限且损耗增加,变极矩直线感应电机电流频率保持恒定不变,即优化了舰载机弹射控制方式,又减小了弹射过程直线电机的能量损耗。