面向拦截的高超声速飞行器轨迹预测关键技术综述
2021-11-19雍恩米翟岱亮
刘 滔 雍恩米 翟岱亮
1.中国空气动力研究与发展中心 空气动力学国家重点实验室,四川 绵阳 621000
2. 中国空气动力研究与发展中心计算所,四川 绵阳 621000
3.中国人民解放军93221部队,北京 100085
0 引言
高超声速飞行器一般具有高升阻比或中等升阻比,获得一定高度和速度后,可在临近空间中利用空气动力控制进行远距离无动力机动滑翔。这种飞行器前段采用弹道式轨迹,后段采用滑翔式轨迹并配以末制导系统,结合了巡航导弹和弹道导弹各自的技术优势,具备高超声速及自主机动的能力[1],还具有再入飞行时间长、飞行高度变化范围大、弹道灵活多变、难以拦截等诸多优点,给当前防御系统带来极大的威胁和挑战[2-3]。尽早发现目标,并准确预测目标运动轨迹实施有效拦截,是防御方急需解决的问题[4]。
对于防御方来说,轨迹预测的目标属于非合作式目标。目标的气动参数、受力特性、机动模式、机动能力和机动范围等信息等情况都未知;且高超声速飞行器飞行速度高,采用非惯性弹道,因此用弹道式目标拦截的方法无法适用,仅能通过预测命中点法进行拦截,因而需要准确跟踪和预测目标轨迹。预测高超声速飞行器目标轨迹,首先根据预警探测系统获取目标的当前位置信息,通过目标跟踪获得目标当前的飞行状态,然后基于目标先验信息(包括目标的机动方式、范围、历史时刻的飞行规律及作战运用方式等)建立目标的飞行状态变化规律模型,同时对目标的运动范围进行约束,不致使目标的轨迹预测范围过大而失去意义。
本文针对面向拦截的高超声速飞行器目标轨迹预测问题,结合近年来高超声速飞行器轨迹预测发展研究进展,对目标运动特性、机动目标跟踪和轨迹预测等高超声速飞行器轨迹预测关键技术进行了综述,最后对整篇文章进行了总结,提出了面向拦截的高超声速飞行器轨迹预测方法重点研究的方向。文章的主要结构如图1所示。
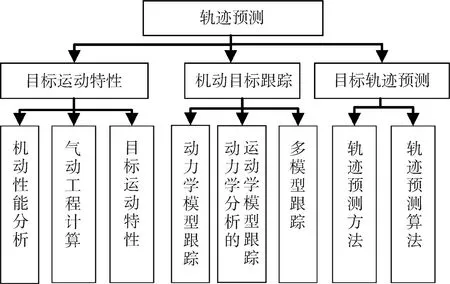
图1 文章结构图
1 目标运动特性研究综述
对高超声速飞行器目标进行轨迹预测的前提和基础是研究其运动特性。从飞行器的受力分析入手,得到其动力学描述,在给定飞行条件下,定性或定量描述目标的机动性能。高超声速飞行器在再入滑翔阶段的机动方式是BTT机动,即目标在滑翔段的飞行状态由目标的初始状态和目标姿态决定。
对目标的运动特性研究主要体现在以下4个方面:1)基于计算流体力学(Computational Fluid Dynamics, CFD)研究目标的运动性能。文献[5-6]综述了高超声速飞行器热力环境预示的各类数值仿真方法的建模方法、适用范围及多场耦合关系,文献[7-8]基于CFD分析了飞行器的热力学特性和稳定性,为飞行器设计提供数据支撑。但是其计算量大,且受限于软件集成性,不利于气动力相关参数的分析。2)基于风洞实验的目标气动性能分析。3)基于动力学方程和运动方程的目标轨迹分析。宗群等提出一种基于变信赖域序列凸规划的再入轨迹中快速求解方法[9]。文献[10-11]基于动力学方程研究受多约束条件下的弹道设计和轨迹优化问题。4)气动力学工程计算方法研究[12]。工程计算速度快,但精度较低[2,13],哈工大周印佳等用分区求解方法实现基于 Navier-Stokes 方程的多场耦合数值计算[14],加州大学Clark K等采用斜激波理论,利用Fluent软件分析X-43A模型纵向运动特性[15],为控制系统设计提供基础条件。
通过分析高超声速飞行器的气动特性和机动方式,获取目标的气动参数、机动模式、机动能力和机动范围等信息,并对其机动能力、机动方式及任务规划等进行约束,可以缩小轨迹预测的范围,提高目标轨迹预测的精度。目前,对高超声速飞行器机动性能的相关研究文献较少,陈小庆等分析了高超声速滑翔飞行器的机动能力[16];谢愈等通过动力学方程研究高超声速飞行器的机动能力并设计了突防弹道[17-18]。文献[19]提出了一种规避禁飞区的侧向机动弹道设计方法。
当前,国内外学者大都从发射方视角对目标运动特性进行研究,从防御方角度的研究罕见。由于缺乏目标气动等参数信息,从防御方研究目标特性基本上处于定性阶段,没有定量的仿真分析。针对目标探测过程,从防御的角度对目标气动参数、机动模式和能力等定量仿真分析研究,是下一步研究需要关注的重点。
2 机动目标跟踪研究综述
目标跟踪是为轨迹预测提供丰富且更为精确的目标轨迹信息。通过雷达直接探测获得的目标信息精度低且含量少,还缺乏目标的速度和加速度等信息,而缺乏的信息是目标轨迹预测所不可或缺的,一般是通过雷达数据处理获取[20]。雷达数据处理的核心技术是目标跟踪技术。目标跟踪主要包括目标运动建模和滤波,其中目标运动建模是指通过数学抽象等手段对目标不确定运动状态进行描述,而滤波则是估计目标的运动参数。目标跟踪原理如图2所示。

图2 目标跟踪基本原理框图
由于高超声速飞行器飞行环境的特殊性及本身的强机动性,其轨迹相对于传统空气动力目标更为复杂多变。受限于其高速且机体承受的强度,飞行器不能进行瞬时大机动,一般只能长时小过载机动。从目标弹道设计与制导控制及稳定性约束等角度分析,控制量的变化规律应尽可能简单,如采用常值或简单的线性分段函数描述。可以为目标的运动模型建模创造条件。
在研究目标运动特性的基础上建立合理的目标运动模型,能揭示目标飞行状态的变化规律,并预测其变化趋势,因而建立准确的目标运动模型是实现有效且稳定跟踪的先决条件,也决定了目标轨迹预测的精度。机动目标运动模型的建模方法如图3所示,主要有基于动力学分析的运动模型、动力学模型及多模型。
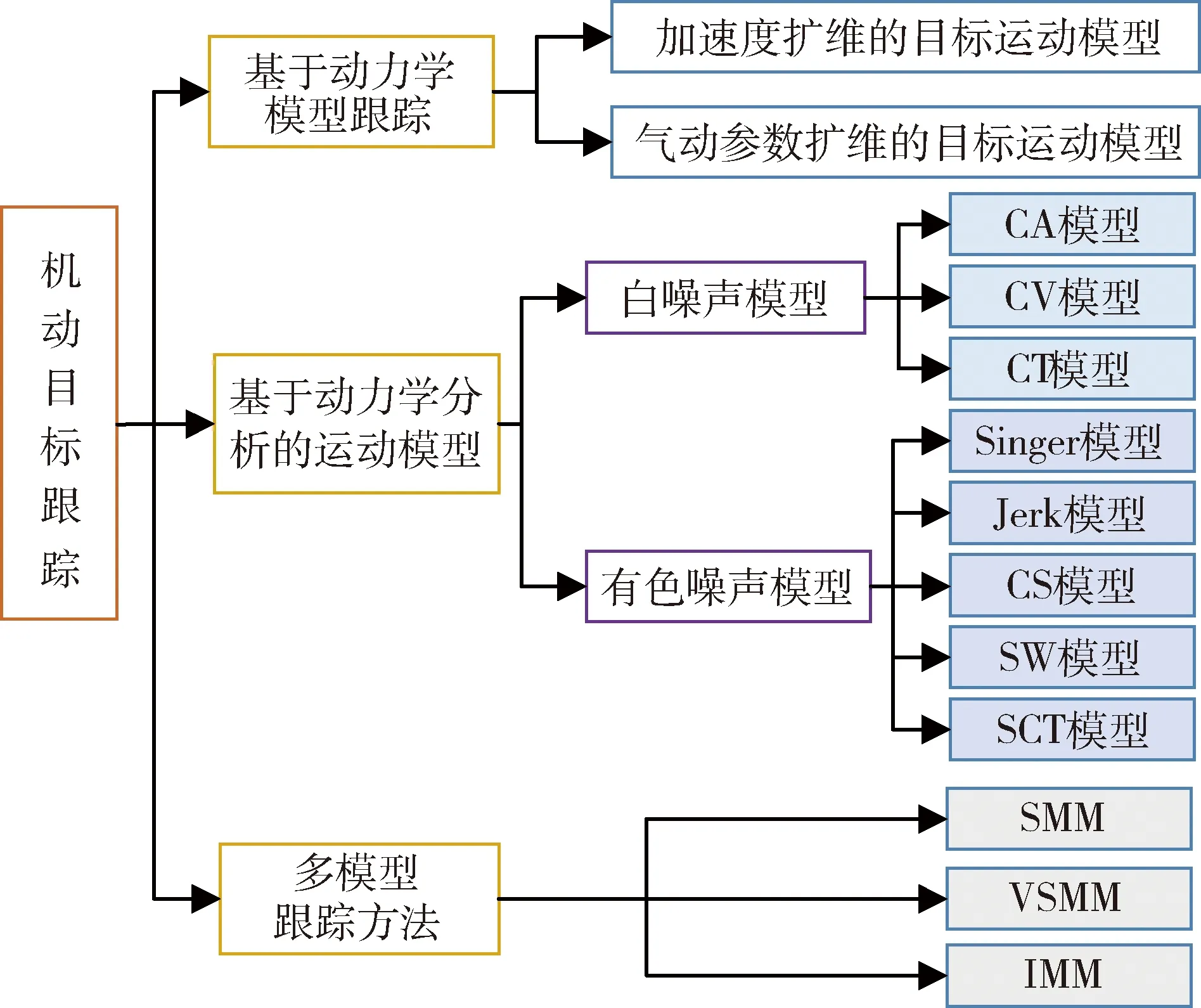
图3 机动目标跟踪方法
2.1 基于动力学模型跟踪方法
动力学模型是在飞行器受力分析的基础上,结合随机噪声统计属性和目标机动特征,通过输入估计或状态增广等方法对目标的未知气动力建模。其途径是通过设计合理的气动参数推导目标所受的气动力,然后以动力学分析其加速度特性。与空间飞行器相比,高超声速飞行器在临近空间飞行时具有一定的机动能力,其动力学模型很大程度上是不确定的。与一般空间飞行器的跟踪方法相比,高超声速飞行器目标跟踪大多需要结合较为精确的动力学模型,但精确的运动模型往往难以获得。在运动模型中引入目标高阶状态(如加速度或加速度的导数等),可以改善目标跟踪的估计精度,因此,可通过扩维目标状态提高跟踪精度。文献[21]通过状态扩维方法,在环境多变的情况下实现了目标状态相关参数和环境参数的估计。文献[22]在目标气动分析的基础上,将相关气动参数扩维到目标状态向量,有效提高了目标的跟踪精度。
在进行高超声速飞行器气动特性和气动参数分析的基础上,通过将轨迹预测所需参数扩维到目标状态,建立相关运动模型进行目标跟踪,在提高跟踪精度的同时可实现该气动参数的估计。考虑到上述气动参数的引入必将导致目标跟踪模型的非线性,在滤波算法方面,着重考虑非线性处理方法。相关的理论方法有不敏卡尔曼滤法、粒子滤波以及它们的改进算法等[23-25],均可为非线性滤波提供参考。
2.2 基于动力学分析的运动学模型跟踪方法
运动学模型是在目标运动分析的基础上,合理假设描述目标机动变化的随机过程,对未知的运动学参数建模。本质上是对目标机动进行统计特性建模,在目标运动分析的基础上,探索准确描述目标机动加速度的随机过程。基于随机过程假设的运动模型有白噪声模型和有色噪声模型。其中,白噪声模型主要包括常速度模型(Constant Velocity,CV),常加速度模型(Constant Acceleration,CA),匀速转弯模型(Constant Turn,CT)等。有色噪声模型有当前统计模型(Current Statistical,CS)、Singer、Jerk、一阶时间相关转弯模型(Singer Coordinate Turn,SCT)、正弦相关(Sine Wave,SW)等。王国宏等基于飞行器再入轨迹周期性特征,以正弦波自相关零均值随机过程模拟目标加速度,并与Singer模型、Jerk模型和CA+CV+Singer交互多模型进行对比[26]。
2.3 基于多模型跟踪方法
上述动力学模型和基于动力学分析的运动学模型都是通过单模型描述目标运动,除此外还有多模型方法。多模型方法认为单个模型不能很好匹配目标强机动运动,在机动模式未知的情况下,多模型方法能够有效提高机动目标运动的匹配度,提高跟踪效果。根据先验模型集设定的不同,可分为静态多模型(Static Multiple Model,SMM)、变结构多模型(Variable Structure Multiple Model,VSMM)和交互多模型(Interacting Multiple Model,IMM)。决定多模型跟踪方法性能的主要因素有2个:模型集设计和多模型算法。
模型集中模型与目标真实运动模式的匹配程度和模型数量的多寡是影响多模型跟踪方法性能的关键因素。文献[27-28]通过多模型算法对高超声速飞行器目标进行跟踪,采用的是常规模型(如CV、CA、CS和CT等)组成的模型集,在跟踪过程中,由于单一模型无法长时间匹配目标运动模式,造成模型切换频繁,影响跟踪精度。梁勇奇在对高超声速飞行器再入段进行气动力分析的基础上,将相关气动参数作为模型参数进行模型集设计,然后采用多模型方法进行目标跟踪,取得了较好的跟踪效果[29-30]。但它们所选取的模型参数在目标飞行过程中随时间变化幅度较大,依然存在模型频繁切换问题。因此,所设计的模型集既要保证与目标运动模式的匹配,还要保证基于此运动模型集的跟踪法能够获得轨迹预测所需参数。关于模型集设计算法有基于数论方法的通用模型集设计方法可供参考[31]。
IMM算法是当前解决机动目标跟踪的首选算法,算法的实质是对多个单模型的估计值进行加权求和,得到混合状态估计[32]。传统IMM算法模型集属于模型集固定不变的结构多模型,当模型集中模型数量较少且与目标运动模式较匹配时,IMM算法跟踪效果较好;实际应用时目标真实的运动模式往往需要大量运动模型来描述,此时IMIM算法计算负担增大,同时还引起过多不匹配模型的竞争,跟踪效果一般。吴新宏等研究防空导弹拦截蛇形机动目标问题,提出自适应交互多模型算法估计目标加速度。IMM算法可通过与其他如UKF等滤波算法相结合[33],提高模型的匹配度,也能通过对马尔科夫转移概率矩阵实时更新,使模型转换能够适用于临近空间目标的轨迹特性[34],或者扩充目标状态维数等方法提高跟踪精度,减少模型误差[35]。VSMM算法保留了SMM算法的加权融合估计准则和IMM算法的模型交互策略,并具有模型集自适应、时变的特点,它能够选取与目标运动匹配的较小模型集合,提高跟踪精度。该算法通过设计运动模型的选择、激活与终止策略,力图使用最少的运动模型集来匹配目标的运动模式,进而提高跟踪效果[36-39]。但这种方法收敛速度较慢、性能不稳定,在跟踪高速机动目标时误差较大,不适用于高超声速飞行器目标跟踪。
在多目标跟踪环境中,由于目标运动、出现、消失及衍生等过程的存在,目标的状态和数目都是随时间变化的;此外,由于目标漏检、虚警及量测误差等问题带来量测信息的不确定性,使得多目标跟踪难以实现。处理多目标跟踪问题的方法主要有联合概率数据关联及其改进算法[40]、多假设跟踪及其改进算法[41]等,但是这些算法需要对量测与目标进行数据关联或建立映射关系,计算量庞大。基于随机有限集(RFS)理论框架,Mahler将多目标跟踪问题描述为贝叶斯估计问题,并推导了多目标贝叶斯滤波的递推公式,奠定了基于REFS多目标跟踪方法的理论基础[42]。与传统的基于数据关联的多目标跟踪算法相比,基于REFS的多目标跟踪滤波算法(PHD滤波、CPHD滤波、MeMBer滤波及其改进算法),可直接对多目标个数和状态同时进行估计,不需要复杂的数据关联过程,因此适于关联过程相对复杂的非传统意义下的多目标跟踪问题[43-49]。
现有机动目标跟踪的研究主要是基于目标跳跃特点的运动学建模、动力学建模或多模型匹配的跟踪算法。虽然在传统运动模型跟踪方法上能够改善跟踪模型性能,但由于目标强机动、运动模型高、非线性等特点,存在模型失配、跟踪精度低的问题,因此,对于如何提高模型的匹配度、分析比较并综合不同跟踪算法的优势,仍需要进一步研究。
3 目标轨迹预测研究综述
基于预测命中点拦截高超声速飞行器目标的先决条件是对其轨迹进行预测,高超声速飞行器预测是指在已有信息的基础上,按照一定的规律或方法对其未来时刻的轨迹进行估计[50-51]。对已知目标轨迹相关信息认识方法的不同构成轨迹预测方法的差异。轨迹预测方法通常可分为3类:1)解析法。弹道式目标具有明确的解析式,一般采用解析法进行轨迹预测[52]。解析法的优点是计算速度快、实时性好。但是对于高超声速飞行器的滑翔段而言,其飞行轨迹是非惯性的,需要通过分析受力情况,进行动力学建模或特征参数拟合, 根据其飞行约束如动压、热流和过载等条件对弹道进行反设计,得到运动轨迹的解析形式[53]。目前,该类方法没有足够的先验信息,人们只得到了某些假设(如升阻比为常数,热流为常数等)下的解析解,且精度有限,无法用于轨迹预测。2)几何法。该方法通过对目标运动轨迹的曲线特征进行分析,形式简单,短期预测精度较高,由于通过跟踪获得目标轨迹时长有限,不能反映目标的长期轨迹特征,长期预测精度低[54-55]。3)数值积分法。该方法允许开展目标运动模型的建模、分析,能够反映目标的运动特征,具有较强的针对性,预测精度较高[56-57]。数值积分法的优点是允许考虑各种复杂的影响因素,轨迹预测精度高;但对于拦截防御方来说,目标气动参数未知,无法进行精确积分运算,方法局限性较大[58]。
从算法的角度讲,轨迹预测问题就是时间序列预测问题。实现算法主要有灰色预测、曲线拟合、神经网络预测、时间序列预测以及它们的混合方法等。灰色预测技术是灰色系统理论最重要的组成部分之一,它利用少量有效数据和不确定数据,通过关联分析原始数据寻找系统变动规律,建立微分方程模型以预测系统未来发展趋势[59]。曲线拟合法利用一些简单基函数(如多项式、有理函数等)的线性组合对历史数据作高精度的逼近,但其实时性和拟合精度受目标的机动模式、拟合基函数以及拟合方法的影响较大[60]。神经网络预测方法是利用神经网络的非线性拟合特性预测轨迹。神经网络可通过对简单非线性函数的多次复合来逼近复杂函数,且不需要事先设定拟合函数[61-63]。时间序列预测通过分析过去一段时间内目标轨迹的时间特征,预测未来时间目标的轨迹特征[64-65]。
以上只是预测方法和算法方面的相关研究。预测问题是一个复杂问题,需要明确的预测策略,而且有用信息越丰富,预测结果的可信度也就越高。对于高超声速飞行器轨迹预测,首先要考虑的是目标轨迹的诸多约束条件,即保证预测的轨迹不能违背动压、过载、热流等这些硬约束,否则预测是无效的。另外,考虑到目标的主动机动特性,可以从目标作战意图、任务规划以及拦截方的防御任务等方面着手,通过深入分析,为轨迹预测提供可行方案或预测范围等信息[66]。张凯等研究了基于意图推断的贝叶斯轨迹预测方法[67]。
目前,关于高超声速飞行器轨迹预测的研究主要集中在制导控制领域,从拦截防御方考虑轨迹预测的文献较小。针对基于预测命中点拦截的防御方,需要对目标轨迹进行中长期轨迹预测,且目标的气动等有关信息仅能通过雷达探测目标的运动信息估计。通过获取目标过去时刻的飞行规律、作战运用方式、机动方式和范围等有限非精确信息,解释目标气动特性、机动性能、目标跟踪运动模型和算法以及轨迹预测的关键技术,可以为防御和拦截高超声速飞行器问题研究提供技术支撑。
4 总结与展望
高超声速飞行武器的迅猛发展给防御方探测跟踪拦截带来极大的挑战,本文针对拦截高超声速飞行器轨迹预测问题,重点从目标运动特性、机动目标跟踪、目标轨迹预测3方面综述了当前的研究现状,指出现有研究的不足。着眼于面向拦截的高超声速飞行器目标长期轨迹预测,提出以下需要重点研究的几个方面:
1)目标运动特性方面,风动试验代价较高,CFD计算局限性较大,工程计算精确度短期内难以提高。与深度学习等智能方法相结合,是研究目标运动特性的一个发展方向。当前,对于运动特性还有待系统深入的研究分析;
2)通过目标跟踪研究发现,目标的跟踪精度受到传感器探测精度的严重制约。可通过增加观测量(如目标径向速度)或优化传感器部署,使目标全程处于传感器的优势观测范围,提高跟踪精度;
3)在现有条件下,低轨卫星虽不能实现全球全天候覆盖,但其探测精度较高,对高超声速飞行器具备一定探测能力。因此,值得进一步研究基于低轨卫星探测数据或低轨卫星和地面预警雷达的融合探测数据的高超声速目标跟踪算法;
4)动压、热流密度及过载等过程约束是高超声速飞行器飞行过程中必须严格满足的强制性约束,否则飞行器会在结构和热防护性能上出现问题。现有轨迹预测一般只考虑控制裕度约束,因此,基于动压等过程约束的目标机动特性研究可缩小预测轨迹的范围。