基于GAPSO-TS 的多基地无人机航路-时间协同规划*
2021-11-18杨川力陈炳才雷印杰
杨川力,宁 芊*,陈炳才,雷印杰
(1.四川大学电子信息学院,成都 610065;2.大连理工大学计算机科学与技术学院,辽宁 大连 116024)
0 引言
由于军事侦察任务的复杂性越来越高,侦察方法朝着多无人机合作的方向逐渐发展[1],因此,多无人机协同规划十分重要。并且多种无人机协作作战是无人机在战场上作战的主要形式[2],多无人机要综合考虑任务点分配,无人机通信,编队保持,碰撞避免,雷达威胁,以及时间等问题。因此,多无人机的航路规划比单无人机航路规划更加复杂和困难。时间协同对于多无人机执行搜索,攻击等任务是极其重要的,可以有效提高任务完成率[3]。
目前,很多研究都是关于单无人机的航路规划,如某些经典算法细胞分解法(CD)、人工势场法(APF)等算法[4]。还有一些智能反应算法,如遗传算法(GA)、粒子群优化算法(PSO)[5]。遗传算法是由Holland 于20 世纪70 年代初提出,目前,该算法已经在各个领域得到应用[6]。文献[7]把遗传算法和概率自动结合,解决无人机在未知空域中路径规划实时性和适用性不足的问题。文献[8]混合了A*算法和遗传算法,提高了基本遗传算法的稳定性和效率。粒子群算法(PSO)是一种基于自然现象的启发式算法,采用了鱼群和鸟群等生物的社会行为,粒子群算法结构简单,便于实现,但收敛速度慢,容易陷入局部最优[9]。文献[10]引入QPSO 算法,对基本PSO 算法进行改进,提高了全局搜索能力。遗传粒子群算法(GAPSO)混合了遗传算法和粒子群优化算法,该算法首先计算适应度函数值,对群体中的个体按适应度函数值的大小进行排序,再采用PSO 算法对群体中的优秀个体进行提高,提高以后的个体被保留并进入下一代,其他适应度函数值差的个体则被淘汰。对已经提高的优秀个体再通过选择交叉和变异步骤得到剩下的个体[11]。
本文同时考虑航路规划和时间协同规划,引入了禁忌搜索算法(Tabu-Search)到GAPSO 中,提出一种遗传粒子群算法和禁忌搜索算法组合的GAPSO-TS 算法,由于GAPSO 算法是基于群体的优化算法,而禁忌搜索算法是基于个体的[12],组合算法保证了搜索的多样性和全局性。
由于各个无人机距任务点距离不同,不能保证所有的无人机都能在协同时间内到达目的地,所以,需要对不满足条件的无人机重新规划航路。目前主要有两个方面来解决此问题,一是以变步长来调整无人机的协同时间;二是以延长航路来达到时间协同[13]。本文对于不满足协同时间的无人机,设计了以协同时间或协同航程为约束的适应度函数,重新规划航路,以此保证所有无人机都能在最短时间内同时到达目标点。
1 无人机航路规划问题建模
1.1 问题描述
面对多基地多无人机最短时间同时到达目标点的任务需求,本文研究多无人机时间协同规划问题。单无人机在执行任务的过程,会碰到很多威胁,包括雷达、地形障碍、防空火炮等。如图1 所示,仿真实验中设定的场景包括了威胁区域、起点、任务点、地形。多无人机规划是在单无人机规划的基础上建立的。
图1 无人机飞行环境
威胁区域用定义为蓝色半球体,威胁区域的中心坐标为(x,y,z),第i 个威胁区域的半径为Ri。地形由山丘和平原组成。
1.2 航行代价评估
式(1)为单无人机航迹规划时的适应度函数,式(2)为多无人机协同规划时,对无法协同的无人机设计的新适应度函数。

1)油耗代价:w1×S
w1是油耗的权重,S 是该航路的实际长度。
2)高度代价:w2×H
w2是高度代价的权重,H=∑Hi,表示所有航路点的高度代价的总和,Hi表示航路点i 的高度代价,用式(3)来计算,Hmax、Hmin为最高和最低飞行高度,h是当前航路点的高度,Cdestory是惩罚因子。

3)威胁代价:w3×S×V
w3是威胁代价的权重,S 是实际航路的长度,V 是所有航路点的威胁系数,Vij是第k 段航路中第i 个点到第j 个威胁区域的威胁系数。总的威胁系数是每段航路k 上的各点的威胁系数取平均值,再对所有航路的威胁系数进行求和,用式(4)计算。

vij用式(5)计算,其中,Dij是点Pk,m到威胁j 的直线距离,Rj是威胁j 的半径,如下页图2 所示。

图2 航迹威胁图
4)重新规划航路代价:w4×|S-P|
w4航路约束代价的权重,S 是实际规划航路的长度,P 是根据最短协同时间设计的航路约束计算方式,tc是协同时间,Vmax是无人机最大运行速度,cs是航路约束系数。

2 基于GAPSO-TS 的航路规划模型
GAPSO 算法是把GA 和PSO 算法结合起来,利用PSO 粒子间的相互联系可以快速成熟的特点和GA 交叉、变异的特点,提高算法的收敛速度和精度[11]。在多无人机规划中,需要进一步提高算法的收敛速度和精度,本文在GAPSO 算法的基础上引入了禁忌搜索算法(Tabu-Search)。
禁忌搜索算法是对个体进行优化,通过搜索个体的邻域来获取最优解,并将已经访问过的邻居放入禁忌表,防止重复访问导致其陷入搜索循环,同时,会特赦禁忌表中的优良状态来保证搜索的多样性与全局性[14]。
2.1 状态空间模型
本文通过无人机在第i 个航路点的航偏角αi、俯仰角βi和飞行时间Ti建立极坐标系(α,β,T)与三维坐标系(x,y,z)的状态空间模型,极坐标转换为三维坐标用式(7)计算。
(xk+1,yk+1,zk+1)表示三维空间中第k+1 段航路的坐标点,αk+1、yk+1、Tk+1分别是第k+1 段航路的航偏角和俯仰角以及每一段航路的运行时间,v 是无人机的平均飞行速度,(xk,yk,zk)是第k 段航路的三维坐标。使用极坐标初始化航路可以保证转角满足约束和航路平滑。
2.2 基本PSO 模型
假设一个粒子有D 维搜索空间,总共有n 个粒子,第i 个粒子的状态空间描述用向量Pi=
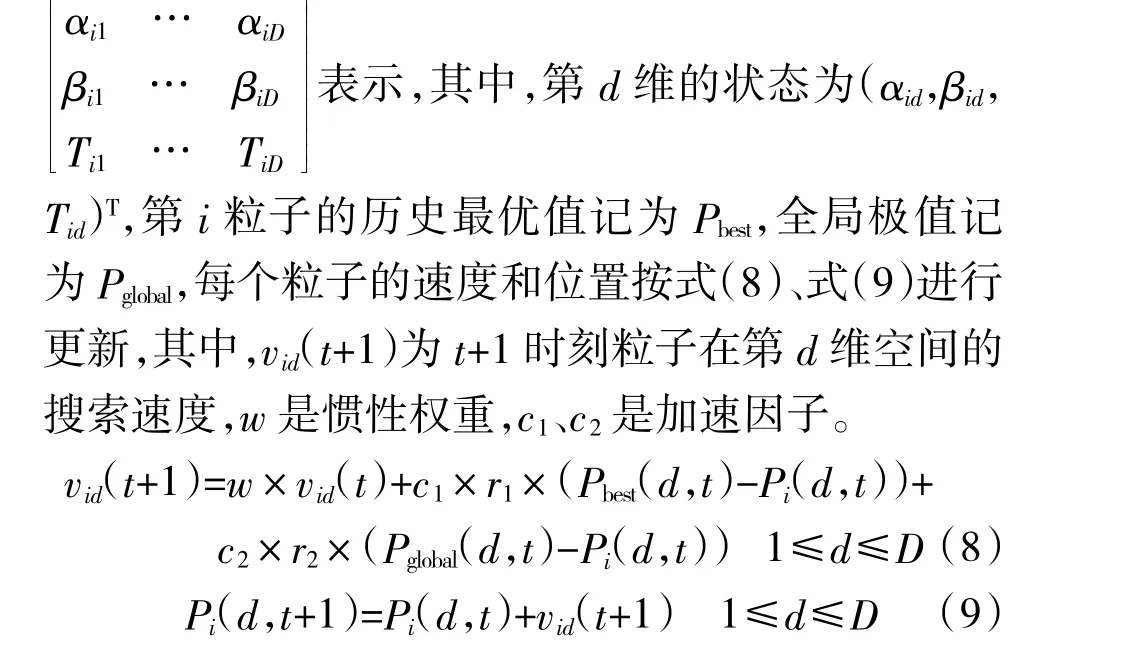
2.3 交叉和变异操作
采用浮点数交叉和变异[15]。设P1、P2是待交叉的粒子,交叉因子为Cp,子代为S1、S2,设α={αi1,…,αiD},β={βi1,…,βiD},T={Ti1,…,TiD}。则P1、P2的交叉操作为式(10),其中,x 是α、β、T 基因中的任意一个,S1(x)表示编号为1 的子代中的x 基因,P1(x)表示编号为1 的父代中的x 基因,S2(x)、P2(x)同上。

设变异因子为Cm,随机数r,变异操作用式(11)来计算变异后的结果。其中,xmax为基因x 的最大值,xmin为基因x 的最小值,S(x)为子代染色体的x 基因。

2.4 GAPSO-TS 算法步骤
1)初始化种群数为NP,粒子维数D,最大迭代次数tmax,随机初始化粒子的速度和状态。
2)根据式(1)计算粒子的适应度值,并更新历史最优和全局最优。
3)对全局最优引入TS 算法进行优化。
4)按适应度对所有粒子排序,保留前NP/2 的粒子,舍弃后NP/2 的粒子。
5)对前NP/2 的粒子进行交叉和变异操作。
6)判断是否满足迭代终止条件,满足,则输出最优解;否则,返回第2)步,算法流程如下页图3 所示。
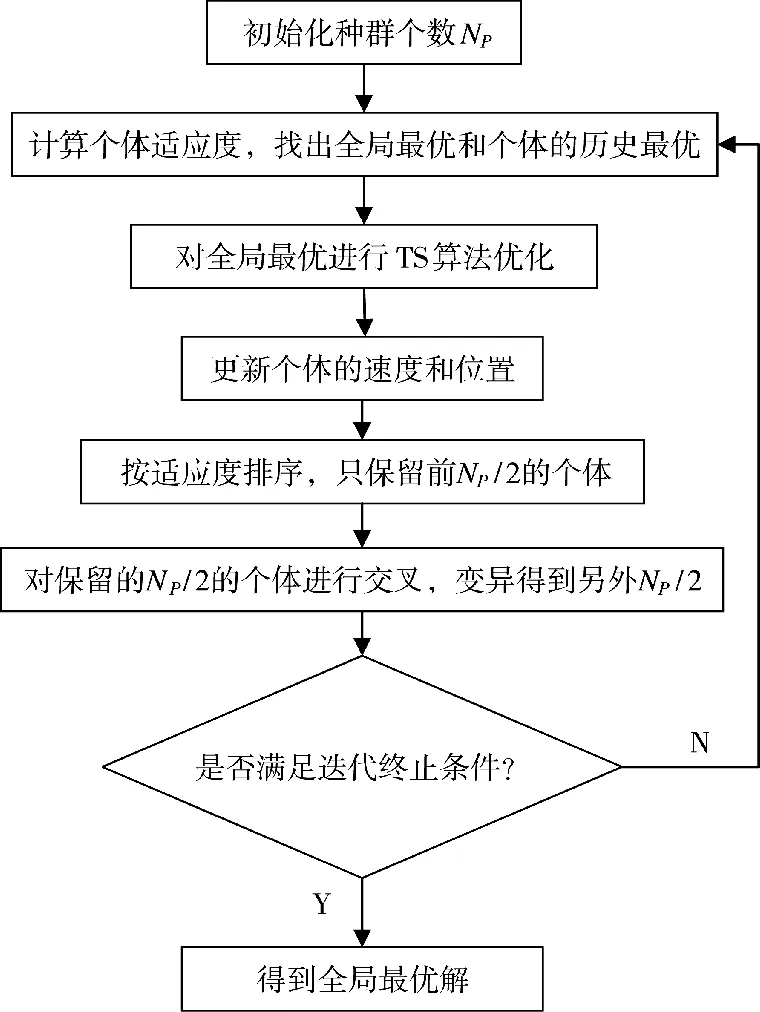
图3 GAPSO-TS 算法流程图
3 多无人机协同规划
3.1 多无人机协同规划模型
多无人机协同规划采用分层规划的模型,先对多个无人机用GAPSO-TS 算法进行航迹预规划,再进行协同规划,如图4 所示。
图4 是无人机协同规划模型,分为顶层协同规划层和底层无人机航迹规划层,先对每架无人机用GAPSO-TS 算法进行预规划,然后根据无人机飞行速度范围,把[Tmin,Tmax]时间窗口传递给协同规划层。
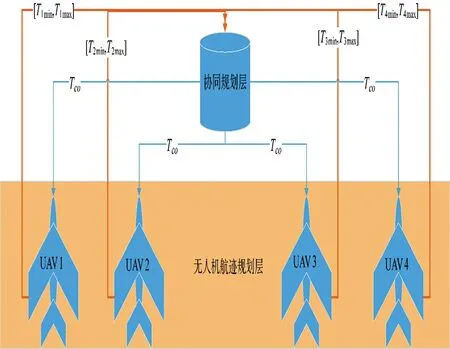
图4 多无人机协同规划模型
协同规划层根据各个无人机的时间集来计算协同时间,取协同时间为时间交集的下界,再把协同时间传递给各个无人机进行速度调整。若没有协同时间,则根据最短时间到达目的地原则,选取最长航路的无人机最短规划时间作为协同时间,对无法满足协同时间的无人机以协同时间为约束,变换适应度函数,进行航迹重规划。
3.2 多无人机协同规划算法

4 单机航路规划和多机航路规划仿真
4.1 仿真环境
在IntelCorei5(TM)-7500@3.4 GHz,8 G 内存的硬件,Matlab 仿真软件环境下进行仿真实验。场景参数由下页表1 所示。
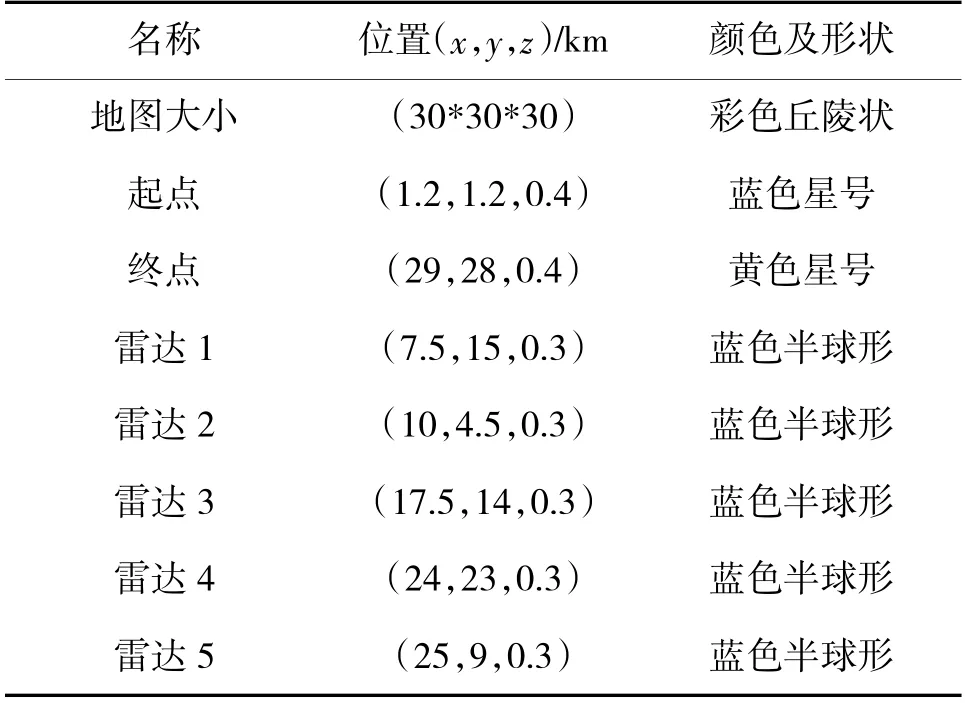
表1 场景参数表
4.2 单无人机三维空间仿真结果与分析
把GAPSO-TS 算法、标准PSO 与GAPSO 算法作对比,仿真结果如图6~图8 所示。
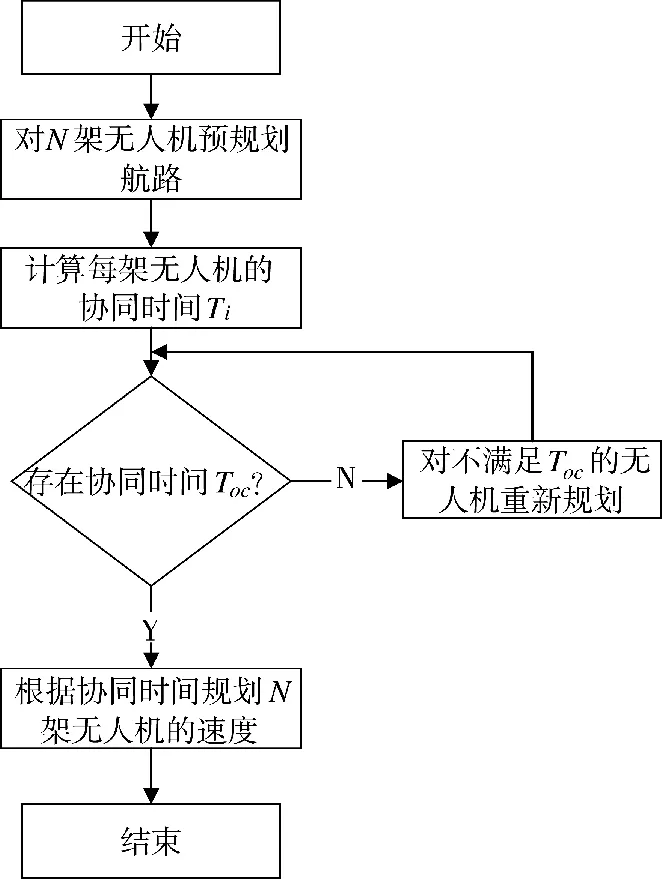
图5 多基地无人机协同规划流程图
从图8 分析,GAPSO 算法由于收敛很快,导致局部最优,PSO 算法收敛速度次于GAPSO 因此,种群多样性丰富,随着迭代次数增加,适应度精度比GAPSO 高,GAPSO-TS 算法继承了GAPSO 收敛快的特点以及禁忌搜索的多样性,在收敛速度和精度上都有所提高。从图6、图7 中3 组算法运行的结果看,PSO 算法运行的航迹通过爬高绕过威胁,GAPSO 和GAPSO-TS 算法的航迹相似,也避开了威胁,但GAPSO-TS 算法的航迹高度更低,说明GAPSO-TS 的全局寻优能力高于GAPSO。
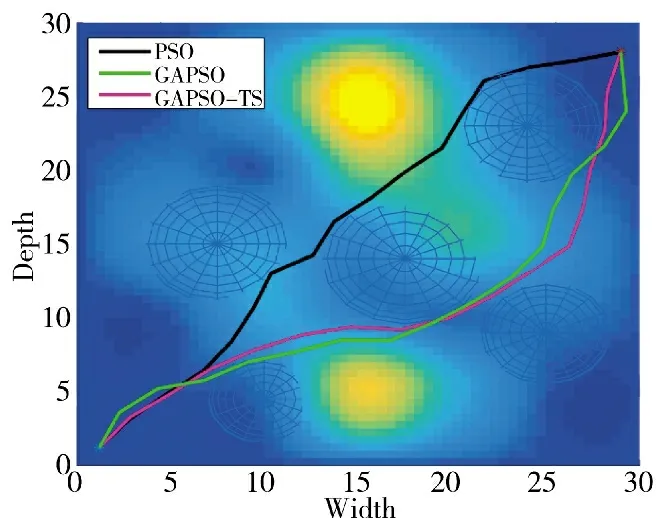
图6 GAPSO-TS,PSO,GAPSO 算法航迹比较俯视图
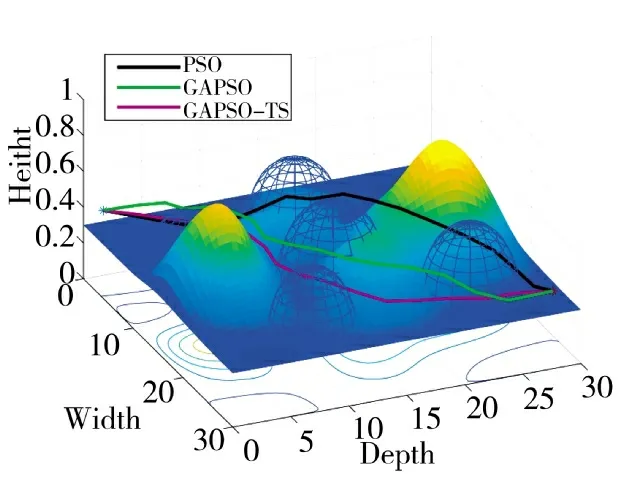
图7 GAPSO-TS,PSO,GAPSO 算法航迹比较侧视图
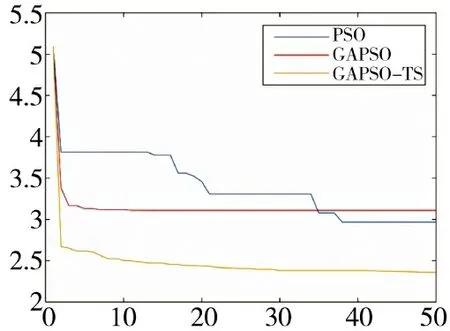
图8 GAPSO-TS,PSO,GAPSO 适应度比较图
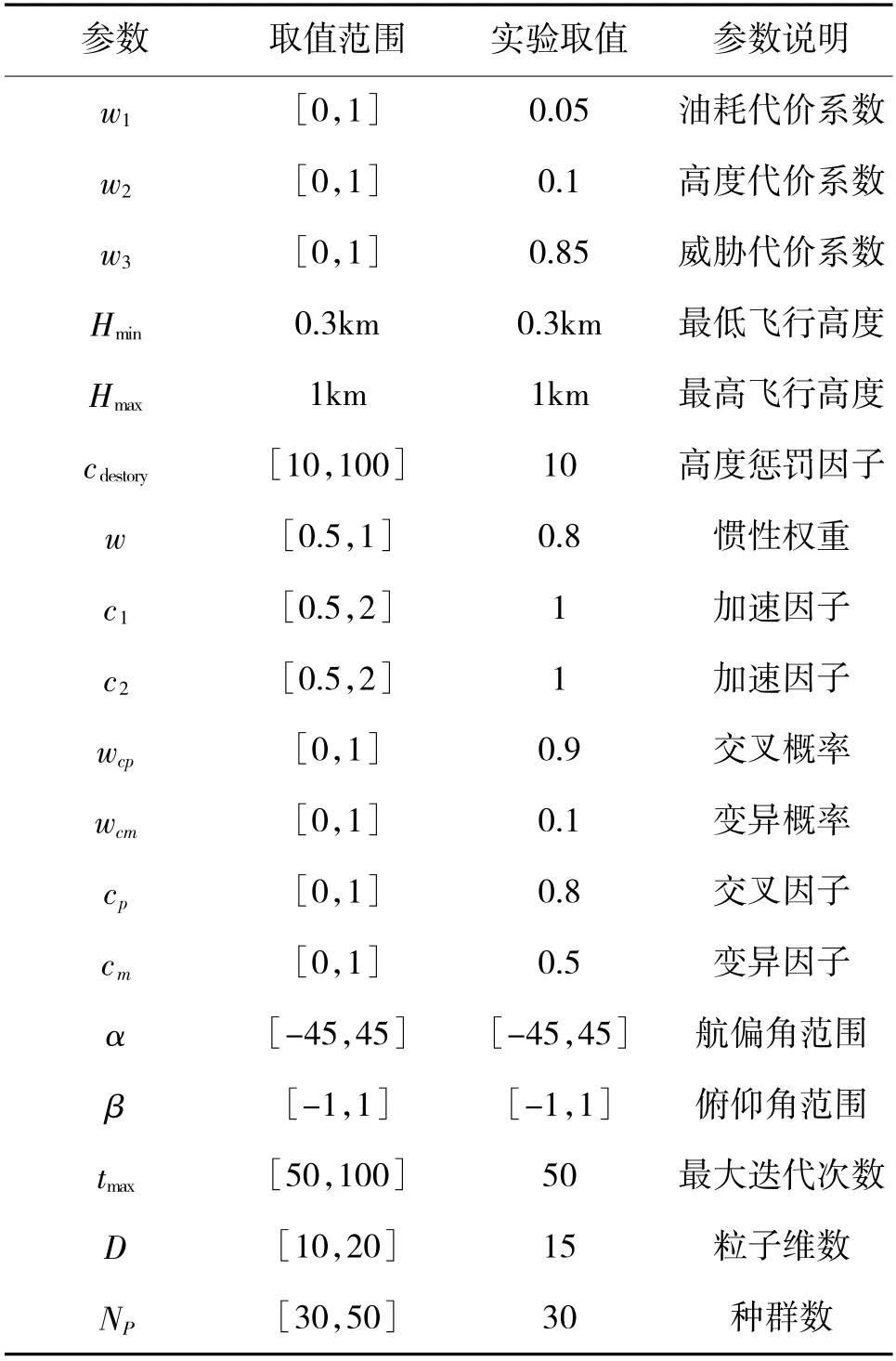
表2 实验参数表
表3 是 做10 次 实 验 的 结 果,PSO、GAPSO、GAPSO-TS 算法的适应度都用式(1)来计算,标准差公式用式(11)来计算,其中,σ 为标准差,n 设为10,fi是第i 次实验的适应度值,f 是平均适应度值,收敛速度定义为f(i)与f(tmax)之间的误差为10%时的最小迭代次数的倒数。GAPSO-TS 算法在精度上比PSO 算法提升了14%,比GAPSO 算法提高了25%,从标准差来看,GAPSO-TS 算法的稳定性要优于PSO 和GAPSO 算法。
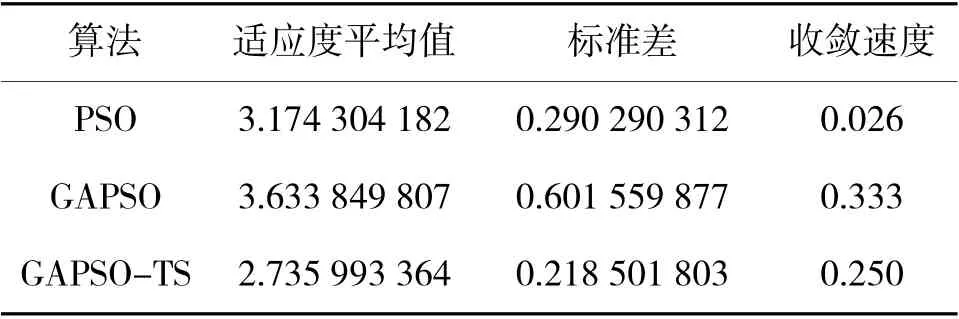
表3 航迹规划适应度比较

4.3 多无人机三维空间协同规划仿真参数设置
为了验证多无人机协同算法的性能,假设4 架无人机从不同位置出发,到达相同目的地。地形、雷达参数如表1 所示,多无人机协同规划模型参数见下页表4。
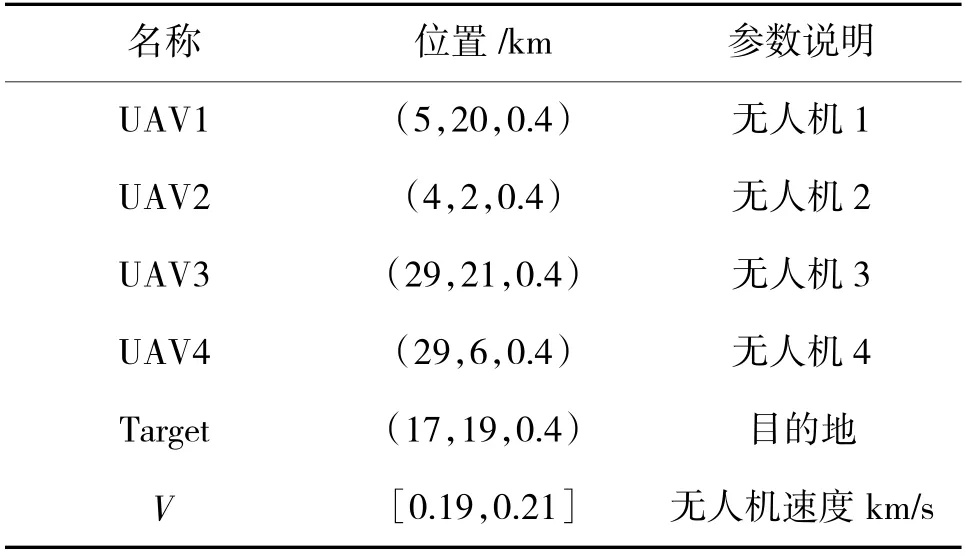
表4 无人机参数
4.4 多无人机协同规划仿真结果与分析
4.4.1 多无人机协同规划仿真实验
通过下页图9、图10 可以看出,各个无人机从起点到目标点完成了航路规划,从图11 和表5 的实验结果中看到,协同时间为86.058 07 s,UAV3 的最大飞行时间为69.978 27 s,不满足时间协同的要求,所以要重新规划,UAV3 重新规划的适应度函数设为式(2),式(2)中航路约束系数cs用来限制航路长度,通过设置不同大小的cs作对比来验证式(2)的有效性。
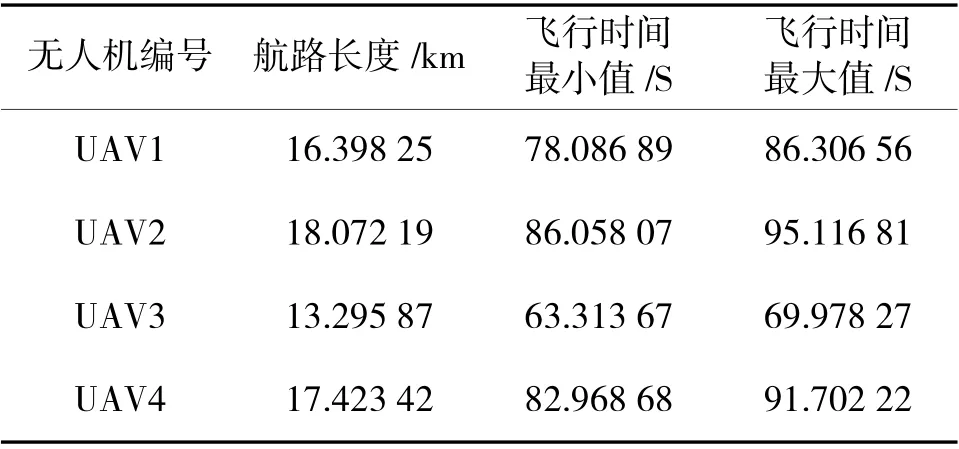
表5 各无人机航迹规划时间

图9 多基地无人机协同规划航迹侧视图
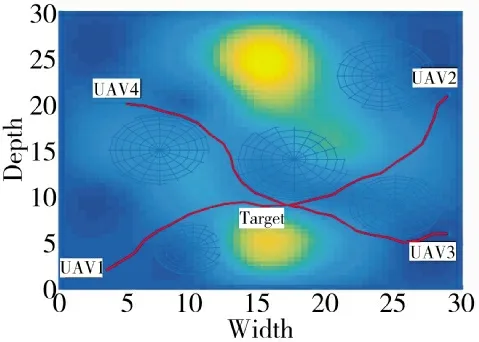
图10 多基地无人机协同规划航迹俯视图
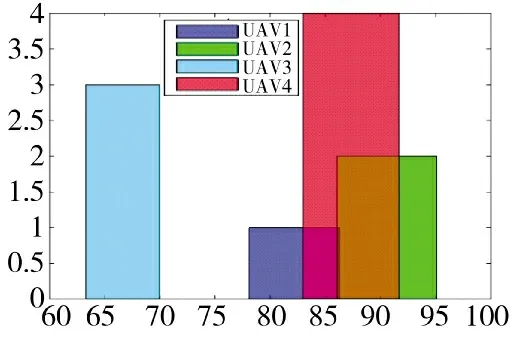
图11 多基地无人机时间窗口
4.4.2 cs=1 时的无人机协同规划仿真
UAV3 重新规划的轨迹如图13 中的黑色虚线所示所示,从图中可以看出UAV3 的航迹延长了,从图12 来看,UAV3 的航迹沿着地形航行来增加航路距离,结合表6 和图14 来看,根据最长航迹最短时间设为协同时间的原则,协同时间设为86.05 s,而UAV3 重新规划的最大飞行时间是86.06 s,大于协同时间,验证了协同规划的有效性。
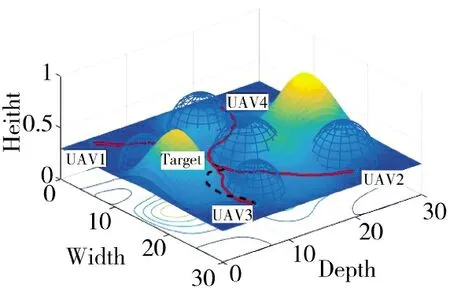
图12 UAV3 重规划侧视图
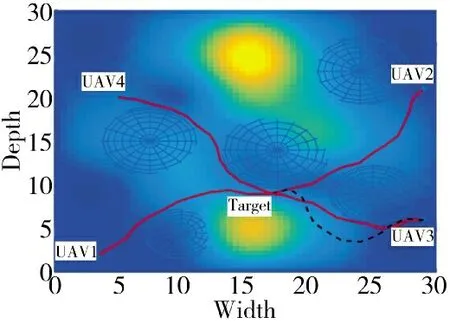
图13 UAV3 重规划俯视图
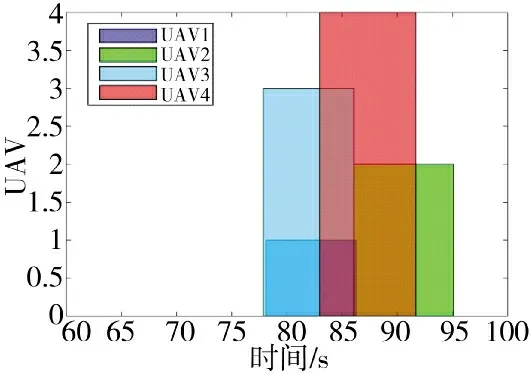
图14 重规划多基地无人机时间窗口
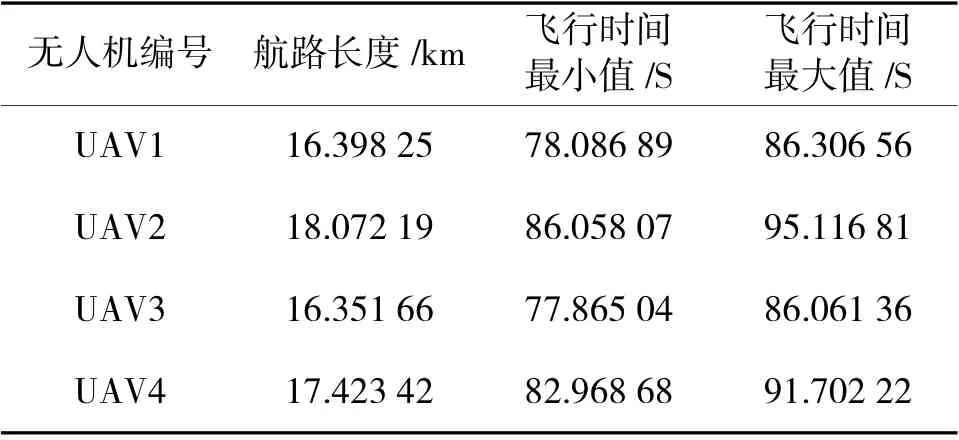
表6 各无人机航迹规划时间
4.4.3 cs=1.02 时的无人机协同规划仿真
当cs=1.02,UAV3 重新规划的航路是图16 中的绿色虚线所示,从图15 中的绿色虚线看出,UAV3重新规划的航路跟随了地形的同时并延长了航路,根据表6 和表7 对比发现,cs=1 时,UAV3 航路长度为16.351 66 km,cs=1.02 的UAV3 航路长度为16.681 12 km,在航路长度上略有增加,从图15 容易看到UAV3 的时间窗口相对于图14 右移了一点,增加了裕量,这样可以保证协同到达的稳定性。对比实验的结果验证了式(2)的有效性。
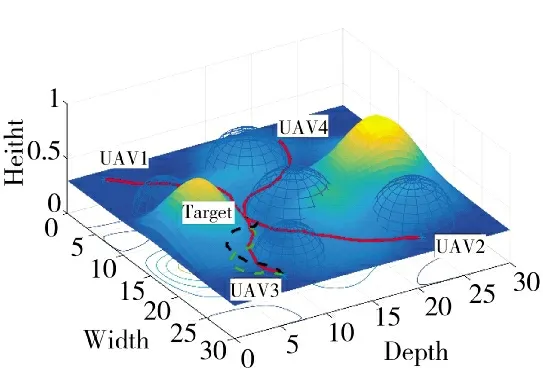
图15 UAV3 重规划侧视图
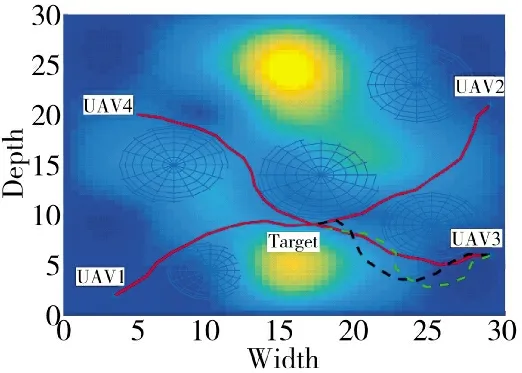
图16 UAV3 重规划俯视图
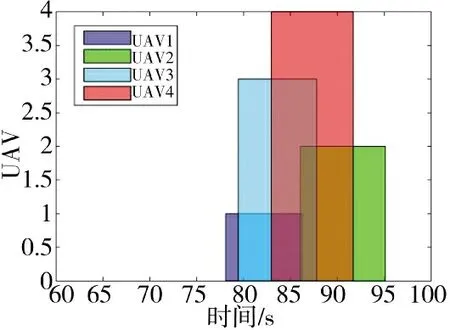
图17 重规划多基地无人机时间窗口
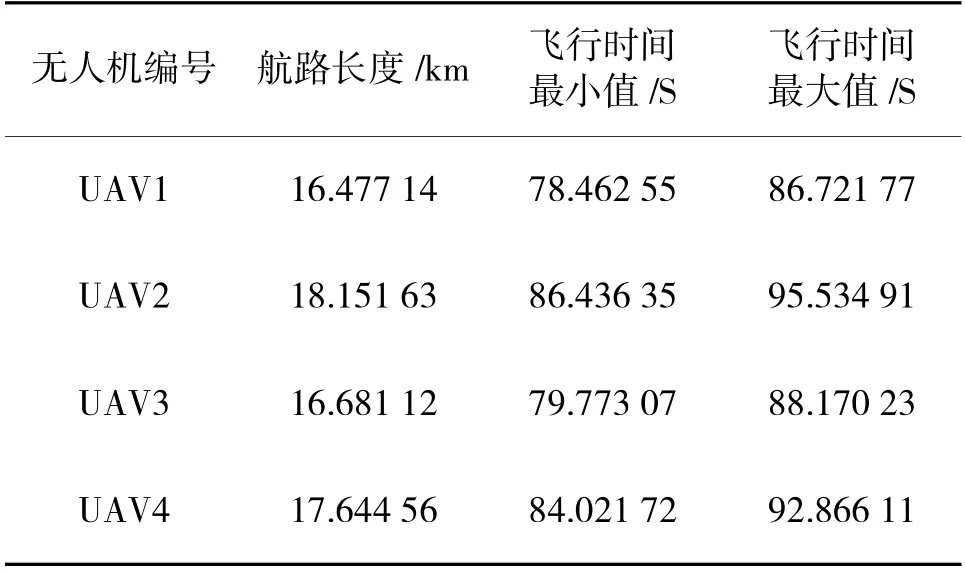
表7 重规划后的各无人机规划时间
5 结论
本文通过引入禁忌搜索算法,提升了GAPSO算法的收敛速度和精度,通过对比实验,验证了GAPSO-TS 算法的有效性。
通过建立多无人机分层模型,设计了新的适应度函数,对不满足时间协同的无人机进行重规划,能够实现多基地无人机目的地集结的时间同步,证明了多无人机时间协同规划算法的有效性。复杂环境中的多机规划是一个多变量、多状态、多约束、多目标的复杂系统规划问题,本文还存在不足,可以在本文的基础上运用马尔科夫链等随机过程模型,进一步将生存状态模型与评估、威胁模型与评估等与航路-任务规划相结合。