基于RSS室内定位中极化敏感圆形阵列研究
2021-11-18杨环,谢宏
杨 环,谢 宏
(上海海事大学信息工程学院,上海 201306)
1 引言
随着物联网和无线通信的发展,基于基站的无线定位技术弥补了GPS在室内定位的不足,可以应用在大型的室内定位区域。传统的基于基站的无线定位方式包括:到达时间定位(TOA,Time Of Arrival)[1]、到达时间差定位(TDOA,Time Difference Of Arrival)[2]、到达方向定位(DOA,Direction Of Arrival)、和接收信号强度定位(Received Signal Strength,RSS)。
基于基站的定位方式又分为单基站和多基站定位。其中,单基站定位较多基站定位更具有优势,一方面,单基站定位解决了多基站严格的时钟同步问题,节省了网络通信量;另一方面,单基站的部署降低了工作量和节省了开支。在基于基站的各种定位方法中,DOA估计定位方法是单基站定位中较为精准的方法。利用常规标量阵列单基站进行DOA估计没有利用电磁波极化信息,造成定位精度不高。文献[3]考虑加入电磁波的极化信息,利用极化敏感阵列进行DOA估计并利用MUSIC算法进行测向,一定程度上提高了定位精度,但需要大量的复杂运算。文献[4]在此基础上对MUSIC算法进行了改进,此种算法一定程度上降低了计算复杂度,取得了较好的定位精度。但利用DOA估计对基站天线布设提出严格了要求,比如:阵元间半倍波长的限制、接收信号质量的要求以及精准的时间同步问题。以往基于DOA的实验大多是基于仿真完成[5],由于DOA估计定位对基站设备以及技术的严格要求,导致其在实际环境中难以应用。基于RSS的定位方法由于比较简单、不需要额外辅助设备的特点,给室内定位的研究带来很大的便利。它分为基于传播模型法和位置指纹法[6]。基于位置指纹的定位算法较大程度上依赖指纹的疏密程度。基于传播模型法由于室内信号传播存在非视距、多径等影响,导致定位误差大,精度不高,室内信号传播的复杂性给定位造成一定的困难。文献[7-10]利用DBN和自编码器对这RSS和位置坐标进行拟合,这种方法摆脱了室内多径的影响,也解决了指纹匹配依赖样本疏密程度的问题。
在单基站定位方式中,以上研究主要涉及两个方法:一种是基于DOA实现定位,但DOA定位对天线的布设造成极大的困难;另一种是基于RSS进行定位,但基于RSS定位方法中,没有考虑到电磁波极化特性的影响,导致定位精度有限。本文在考虑电磁波极化的基础上对极化敏感圆形阵列进行研究,最后给出一种理想单基站布设方式。该基站模型在实现较为精准定位的前提下,突破了基站阵元间距的限制,降低了阵元耦合作用和基站布设的难度。
2 极化敏感圆形阵列传播模型的建立
2.1 对任意放置的收发天线传播模型的推导
弗里斯传输公式给出当收发天线极化失配的情况下,天线接收功率为

(1)
其中G1(θ1,φ1),G2(θ2,φ2)分别是发射天线和接收天线的增益。A为极化损耗因子。r发射和接收天线的间距,λ为电磁波的波长,λ=c/f。
由于电磁波具有极化特性,本文中考虑收发天线的极化方向对定位结果的影响,因此对收发天线任意放置情况进行极化损耗因子的推导。为简化问题,假设本文所使用天线均为理想偶极子天线,天线阵元为正交偶极子对。
下面对任意方向放置的收发天线的功率接收模型进行简单推导
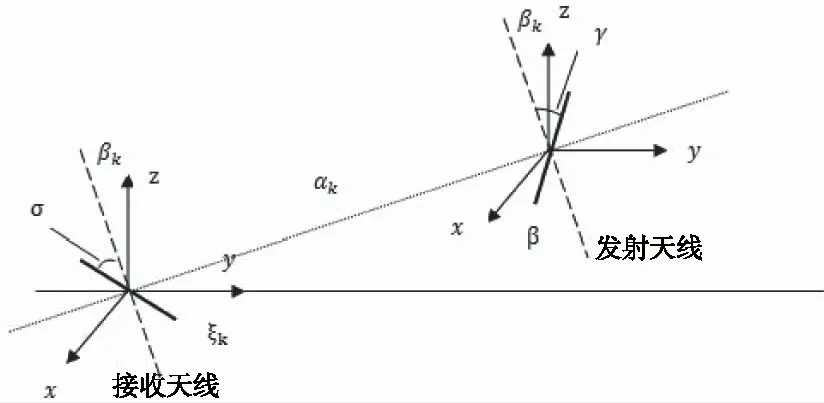
图1 收发天线极化方向不一致示意图
如图1,假设发射天线和接收天线的单位极化矢量分别为:β和ξk,来波方向矢量为αk,发射天线极化方向与来波方向垂直面的夹角为γ,发射天线极化方向在垂直于来波方向平面的投影为βk,其中
‖βk‖=‖β‖cos(γ)
(2)
则发射天线极化电场在接收天线上的投影大小为
Ek=‖βk‖cos(σ)=cos(γ)cos(σ)
(3)
得到任意放置的线极化天线功率接收模型为:

(4)
其中γ和σ分别为发射天线和接收天线与βk的夹角,M,N为常数。
2.2 极化敏感圆形阵列接收信号模型

图2 极化敏感圆形天线阵列模型
如图2,天线阵列均匀摆放在半径为r的圆周上发射天线距离原点的距离为R。首先做以下假设:
1) 空间单位方向矢量为
α=(cosφsincosθ,sincosφsincosθ,cosθ)
2) 第k组天线的空间位置方向矢量为
ηk=(cosφk,sincosφk,0)
两个垂直的天线极化方向为
ξk0=(cosφk,sincosφk,0)
ξk1=(-sincosφk,cosφk,0)
3) 标签的单位极化方向为

空间点为Rα,天线坐标为rηk,则第k对天线的来波方向为
αk=rηk-Rα
(5)
4) 发射天线极化方向在垂直于来波方向平面的投影为
(6)
针对本文所研究的问题,发射天线的功率以及电磁波波长都是固定的,因此本文当作常数C。则第k对天线接收到的功率表示为

(7)
则n对天线的接收功率为

(8)
γk为发射天线β与βk的夹角,σk0和σk1为一对接收天线极化方向ξk0,ξk1分分别与βk的夹角,其中

(9)
上式为极化敏感圆形阵列接收信号模型,可以看出其接收模型比较复杂。进行定位时,需要进行逆运算,即通过接收信号进行对发射天线的定位,其模型将更加复杂,计算方面有很大的难度。因此本文利用深度学习模型对此问题建立模型,进行定位研究。
3 单基站圆形阵列定位模型
深度学习近年来已成为机器学习领域的研究热点,从特征分类到人脸识别再到回归预测,充分展现了深度学习具有良好的学习表达能力和拟合能力。深度学习基于人工智能和神经网络的理念,对复杂特征的训练更具有智能性,使定位更加精准,尤其在指纹数据库比较大时,更具优势。
3.1 深度学习
深度学习源于人工神经网络的研究,通过利用底层特征形成更加抽象的高层特征表示,深度学习的概念由Hinton等人于2006年提出。本文中先通过自编码器无监督训练进行特征提取,之后通过BP神经网络进行有监督训练做回归定位。
3.1.1 自编码器
自编码器(AutoEncoder,AE)是神经网络的一种,它由一个编码器函数(encoder)h=f(x)和一个解码器(decoder)函数r=g(h)组合而成。编码器将输入数据转换成一种不同的表示h,而解码器则将这个新的表示转换到原来的形式。所以AE的目的就是使输出与原始的输入尽量保持一致。自编码器结构如图3。

图3 自编码模型
3.1.2 神经网络算法
BP(Back Propagation,BP)神经网络一般由多层网络结构组成,其中包含一层输入层和一层输出层以及多层隐含层,每层有多个并行的神经元构成,方便并行处理数据,相邻两层神经元通过前馈方式传输数据,同层神经元之间无连接。训练过程是BP神经网络的输出与期望输出不断的进行比较,来反向调节神经元连接的权值和阈值。BP神经网络的结构如图4。

图4 BP神经网路结构图
3.3 单基站圆形阵列定位过程
1) 数据的获取及处理
按照2.2节中极化敏感圆形阵列接收信号模型,对s个坐标点进行实验得到数据样本。具体步骤如下:
a. 对第i(i=1,2,…,s) 个坐标点,将发射天线逐一放置8个方向得到接收信号;
b. 将数据样本信号进行归一化处理;
c. 将数据样本分为训练样本和测试样本。
2) 用深度学习算法进行定位
a. 利用自编码器对数据进行特征提取;
b. 利用BP神经网路进行回归定位。
4 仿真结果及其分析
4.1 仿真环境的介绍
此次仿真主要是利用MATLAB R2015b来完成的,在样本采集阶段中利用天线的传播模型来对室内传播信号的情况进行模拟,此次试验对室内信号的信道模型作了较为理想化的假设,排除了一些非理想因素的影响,并对噪声情况作了合理的理想化假设。选择6m×6m×2.5m的定位场地内,建立坐标系,z轴垂直向下,原点在2.5m高的房顶中央,以原点为中心的圆周上均匀布置相互垂直放置的天线,进行以下仿真。
4.2 仿真结果分析
4.2.1 天线的布设情况分析
天线的位置以及极化方向的确定会影响定位的精度,因此本文针对天线数目不同、摆放方式不同的几种简单的天线布设进行仿真。如图5。

图5 天线布设情况
上图为几种典型的天线布设情况,其定位结果如图6。

图6 8种天线布设定位情况
(子图b是对子图a的放大)
由上图可以直观看出,随着天线对数的增多,平均定位误差呈下降趋势。尤其是当天线对数为3、4时,平均定位误差明显要大的多。随着天线对数的增多,平均定位误差降低的越来越小,当天线对数为6对时,此时再增加天线的对数,平均定位误差降低的不明显。
在各种天线布设的方案中,综合天线布设的复杂度和定位误差的基础上,当圆形阵列上均匀放置6对天线时效果比较理想。因此接下来对在一个圆周上放置6对天线的情况进行分析。
4.2.2 信噪比对定位误差的影响
针对6对天线布设情况进行分析,当信噪比SNR为0dB-30dB时,定位误差变化情况如图7。

图7 平均定位误差随信噪比变化情况
图中可以看出,随着信噪比SNR的增加,平均定位误差总体呈下降趋势,误差的变化率也越来越小。当信噪比为20dB再继续增加时,平均定位误差变化不明显。
4.2.3 圆形阵列半径大小对定位误差的影响
针对6对天线布设情况进行分析,当信噪比为10dB时,定位误差随着天线布设圆形半径的变化如图8。

图8 平均定位误差随天线阵列所在圆半径变化情况
由图中可以看出,随着半径的增加,定位误差逐渐减小。当天线阵列所在圆周半径为1m左右的时候,随半径增大,定位误差降低的速率变得很缓慢。考虑实际天线阵列的布置情况,天线阵列布置在1m的圆周上较为理想,此时的定位误差约为0.14m。
5 结语
针对当前DOA定位中存在阵元布设困难以及RSS定位精度的问题,本文对极化敏感圆形阵列进行了研究,实验结果如下:
1)通过对任意极化方向的收发天线接收模型进行研究,推导出圆形阵列的接收信号模型,为以后的研究提供了理论依据;
2)通过研究信号的噪声、阵元的个数和阵列的规模大小分别对定位误差的影响,得出一种较为理想的基站模型,即:将6对阵元均匀布置在1m的圆周上。此模型为室内定位基站的布设提供了可行性。
本文对室内环境作了理想化假设,但室内信号的传播会受到多径、色散等因素的影响,因此下一步将对此进行深入研究。
