油茶果采摘机阀控液压马达模糊神经网络PID控制
2021-11-17范子彦李立君李宇航傅雄辉
范子彦, 李立君, 李宇航, 吕 辉, 傅雄辉
(中南林业科技大学 机电工程学院, 湖南 长沙 410004)
引言
油茶是一种综合利用价值很高的经济作物,常用作制作食用油、高级化妆品精油、有机肥等。当前油茶果的机械化采摘主要分为齿梳式、振动式、胶辊式[1]和夹持式[2]。其中,振动式油茶果采摘机是当前主流应用的机械化采摘作业方式,主要靠液压马达驱动振动发生机构产生振动[3],在采摘过程中保持液压马达转速在一定范围内恒定输出,能够保证一定振动频率,从而使油茶果从树枝上顺利脱落,故液压马达转速在一定范围内恒定输出控制对振动式油茶果采摘机尤为重要。
当前在控制领域较为经典的控制方式是采用PID控制方法对调速系统进行闭环控制,即通过调节比例、微分以及积分3个环节方式实现对系统的控制,然而对于这种较为复杂的阀控液压马达系统,传统的PID控制方式难以达到较为理想的控制效果[4-7],故本研究引入模糊控制和神经网络的控制方法,采用模糊神经网络PID算法来实现油茶果采摘机阀控液压马达系统调速。
首先对推摇式油茶果采摘机振动液压系统进行了分析,明确了其工作原理,并在此基础上建立系统的数学模型;接着结合PID控制、模糊控制和RBF神经网络的基本原理,设计了一种模糊RBF神经网络PID控制器;最后使用MATLAB/Simulink软件对该控制系统进行了不同工况下的仿真分析,以验证该控制方式的有效性。
1 控制系统原理
1.1 执行机构
推摇式油茶果采摘机执行机构的基本结构如图1所示,其工作的基本原理是通过夹持液压马达2带动夹紧机构5夹持油茶果树枝,再由振动液压马达1驱动控制推摇振动机构3产生推摇运动使油茶果树枝振动,当推摇力大于油茶果与油茶树枝之间的结合力时,油茶果从树枝上自然脱落,实现其机械化采摘作业。
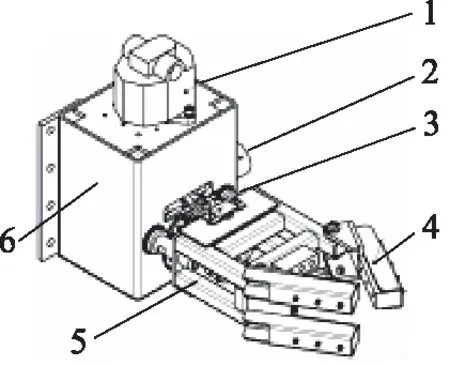
1.振动液压马达 2.夹持液压马达 3.推摇振动机构 4.夹爪 5.夹紧机构 6.支座外壳
在推摇作业过程中,振动液压马达输出转速的大小决定了推摇振动机构的振动发生频率,进而影响油茶果采摘的效果与效率,故振动液压马达的输出转速是影响油茶果采摘机采摘效果的关键因素之一。
1.2 振动液压系统原理
由于此推摇式油茶果采摘机的液压系统有机械手臂运动定位及夹持和振动发生多种功能,机械手臂定位夹持功能所需要液压泵流量较小,而振动发生功能所需液压泵流量较大,故液压系统采用双泵供油,既实现动作的快速性又满足系统的流量需求,最终设计了如图2所示的液压系统(仅列出了振动发生功能部分)。
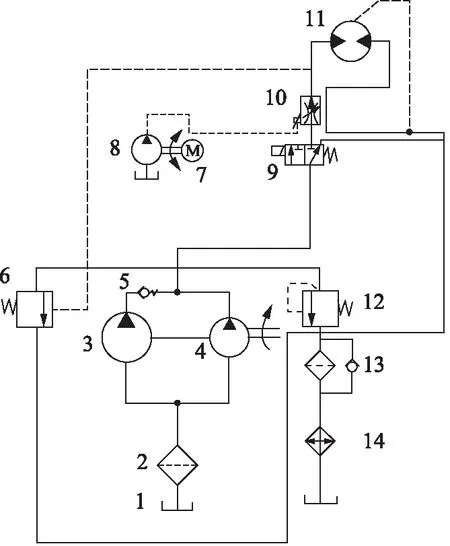
1.油箱 2.泵过滤器路 3.双联大液压泵 4.双联小液压泵 5.单向阀 6.大溢流阀 7.直流电机 8.小型定量液压泵(马达) 9.二位三通电磁换向阀 10.先导式电液比例流量阀 11.振动液压马达 12.小溢流阀 13.回油单向过滤器路 14.冷却器
由图2可知,推摇式油茶果采摘机液压系统在实行运动定位及夹持功能时,换向阀9置于断电状态,仅采用液压泵4向工作系统供油,完成定位和夹紧动作;当夹爪对油茶树实现夹持后,夹持液压马达采用单向液压锁锁紧,此时换向阀9置于通电状态,整个液压系统液压泵3和4同时仅向振动液压马达供油,至振动发生结束。如图3所示,振动液压马达轴末端通过联轴器与光栅编码器轴相连接,控制系统通过计量单位时间内接收的光栅编码器脉冲数,即可得到液压马达转速,构成闭环控制系统。而振动液压马达的转速是通过调节先导式电液比例流量阀的流量实现的。
1.振动液压马达 2.编码器
通过调整直流电机7的转速控制小型定量液压泵(马达)8向电液比例流量阀10的先导阀供油,从而实现对电液比例流量阀10的流量控制,以实现对流入振动液压马达11的流量控制,进一步控制液压马达的输出转速。而直流电机7的转速又是通过对其输入电压来实现的,故本系统是通过对直流电机7的输入电压的控制来实现对电液比例流量阀10的控制,进而实现对振动液压马达11的控制,其基本控制流程图如图4所示。

图4 推摇式油茶果采摘机振动系统受控流程
2 系统数学模型
2.1 液压马达数学模型
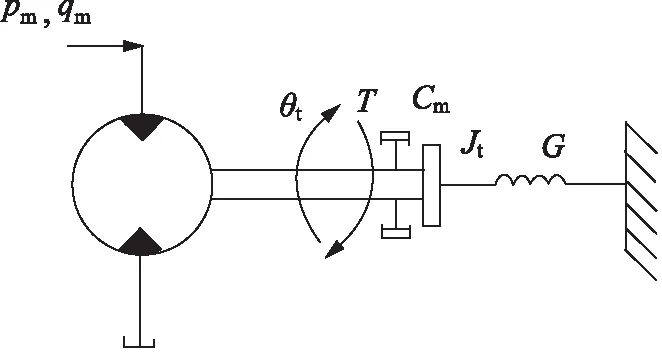
图5 液压马达计算简图[8]
首先建立液压马达增量式流量连续性方程:
(1)
式中,qm—— 液压马达进油口流量
Vstm—— 液压马达理论排量
θm—— 液压马达输出轴的转角
Kcm—— 液压马达泄漏系数
pm—— 液压马达进油口压力
Vm—— 液压马达进油腔容积
Em—— 液压油弹性模量
再建立负载与液压马达轴上的增量式力矩平衡方程:
(2)
式中,Jt—— 液压马达转轴和负载折算到马达轴上的总转动惯量
cm—— 液压马达和负载的黏性阻尼系数
G—— 负载的扭转弹簧刚度
T—— 作用在液压马达输出轴上的任意外负载力矩
2.2 电液比例流量阀数学模型
推摇式油茶果采摘机所采用的电液比例流量阀是一种主动先导式流量阀[9],其特性为主阀的流量正比于先导阀流量[10],采用直流电机7带动小型定量液压泵(马达)8向先导阀供油,先导阀流量正比于直流电机的转速n与小型定量液压泵(马达)8的流量qp,故通过对直流电机7的调速控制即可实现对电液比例流量阀10的流量控制[11]。
1) 先导阀驱动直流电机模型
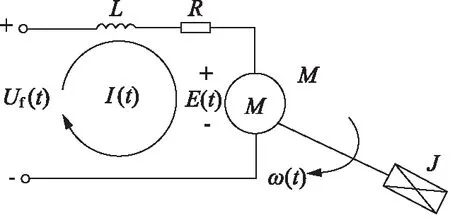
图6 先导阀驱动直流电机计算简图
直流电机回路的基尔霍夫电压增量式方程:
(3)
式中,Uf—— 电机电枢电压
R—— 负载的电阻
I—— 回路电流
L—— 负载的电感
Ce—— 反电动势常数
ω—— 电机转速
直流电机所产生的转矩的增量式方程:
(4)
式中,M—— 电机产生的转矩
CM—— 转动常数
J—— 电机及负载的转动惯量
B—— 旋转部分的黏性阻尼系数
2) 主动先导式电液比例流量阀模型
先导阀流量方程:
qb=nqp
(5)
式中,qb为先导阀流量。
主阀流量方程:
(6)
式中,qM—— 主阀流量
CdM—— 主阀流量系数
WM—— 主阀开口面积增益
x—— 主阀阀芯位移大小
ρ—— 液压油密度
pA—— 进油口压力
pB—— 出油口压力
主阀流量方程中的主阀开口面积增益公式为:
(7)
式中,dm—— 主阀阀口直径
α—— 阀口开口角度
d—— 主阀阀芯直径
主阀流量方程中的主阀芯位移方程为:
(8)
式中,Cdc—— 反馈节流槽流量系数
Wc—— 反馈节流槽开口面积增益
xi—— 反馈节流槽预开口量
主阀芯流量方程:
q=qM+qb
(9)
将式(6)和式(8)带入式(9)得到:
(10)
将式(5)、式(10)两式线性化并改写成增量式方程:
(11)
Δq=kxbΔqb-kqFΔxi+kmΔp
(12)
式中,kw—— 先导阀流量-转速系数

kqF—— 主阀流量增益
km—— 主阀的流量-压力系数
3) 阀控振动液压马达系统状态方程推导
选择电磁铁线圈的电流增量ΔI、电机转速增量Δω、液压马达轴运动角位移增量Δθ、液压马达轴运动角速度增量dΔθ/dt以及液压马达进油口压力增量Δpm为状态变量,通过对式(1)~式(4)、式(11)、式(12)进行化简得到如下状态方程:
(13)
式中:
输入变量:
系统状态变量:
输出方程:
y=x4
将上述状态方程和输出方程写为矩阵形式,有:

(14)
其中:

(15)
3 PID控制器设计
3.1 PID控制
增量式数字PID[12]的控制规律为:
Δu(k)=u(k)-u(k-1)
=KP[e(k)-e(k-1)]+KIe(k)+
KD[e(k)-2e(k-1)+e(k-2)]
(16)
式中,u(k),u(k-1) —— 第k和k-1次控制器输出值
KP—— 比例系数
KI—— 积分系数
KD—— 微分系数
e(k),e(k-1),e(k-2) —— 第k,k-1,k-2次的输入误差值
振动液压马达控制系统采用PID控制调节比例、积分、微分3个参数较难达到最优控制效果;选用模糊RBF神经网络对PID中比例、积分、微分3个参数进行调整,以实现更好地调速控制,模糊神经网络组成输入输出函数关系如式(17)所示,模糊RBF神经网络PID控制流程如图7所示。
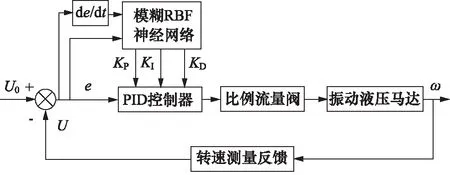
图7 模糊RBF神经网络PID控制原理
(17)
3.2 模糊神经网络
模糊RBF神经网络一共分为4层,分别为输入层、模糊化层、模糊推理层、输出层[13-29],其结构如图8所示。
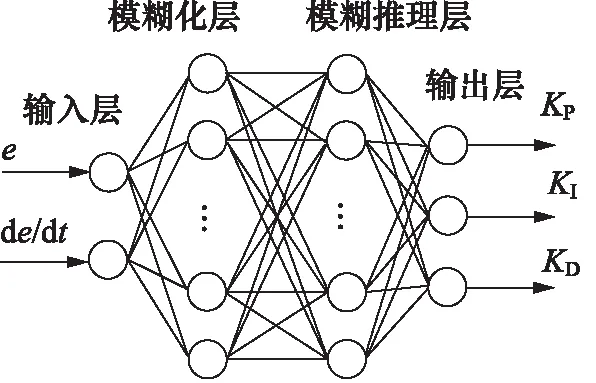
图8 模糊神经网络结构
(1) 输入层,输入层采用2个神经元节点,代表控制系统的偏差e以及偏差变化率de/dt,其输入激活函数为f1(xi)=xi;
(2) 模糊化层,作用是将2个输入进行模糊化,取系统的偏差e以及偏差变化率de/dt的模糊子集为{NB,NM,NS,ZO,PS,PM,PB},即{负大,负中,负小,零,正小,正中,正大},共计7个神经元节点,其模糊子集取值范围为[-6,6],本层采用高斯型隶属度函数,计算公式为:
(18)
式中,i=1,2;j=1,2,…,m;cij和bj分别表示隶属度函数的中心值和宽度值;
(3) 模糊推理层,通过与模糊化层的连接完成模糊规则的匹配,在各节点之间进行模糊运算,所使用的计算公式为:
(19)

其模糊规则控制表如表1所示。
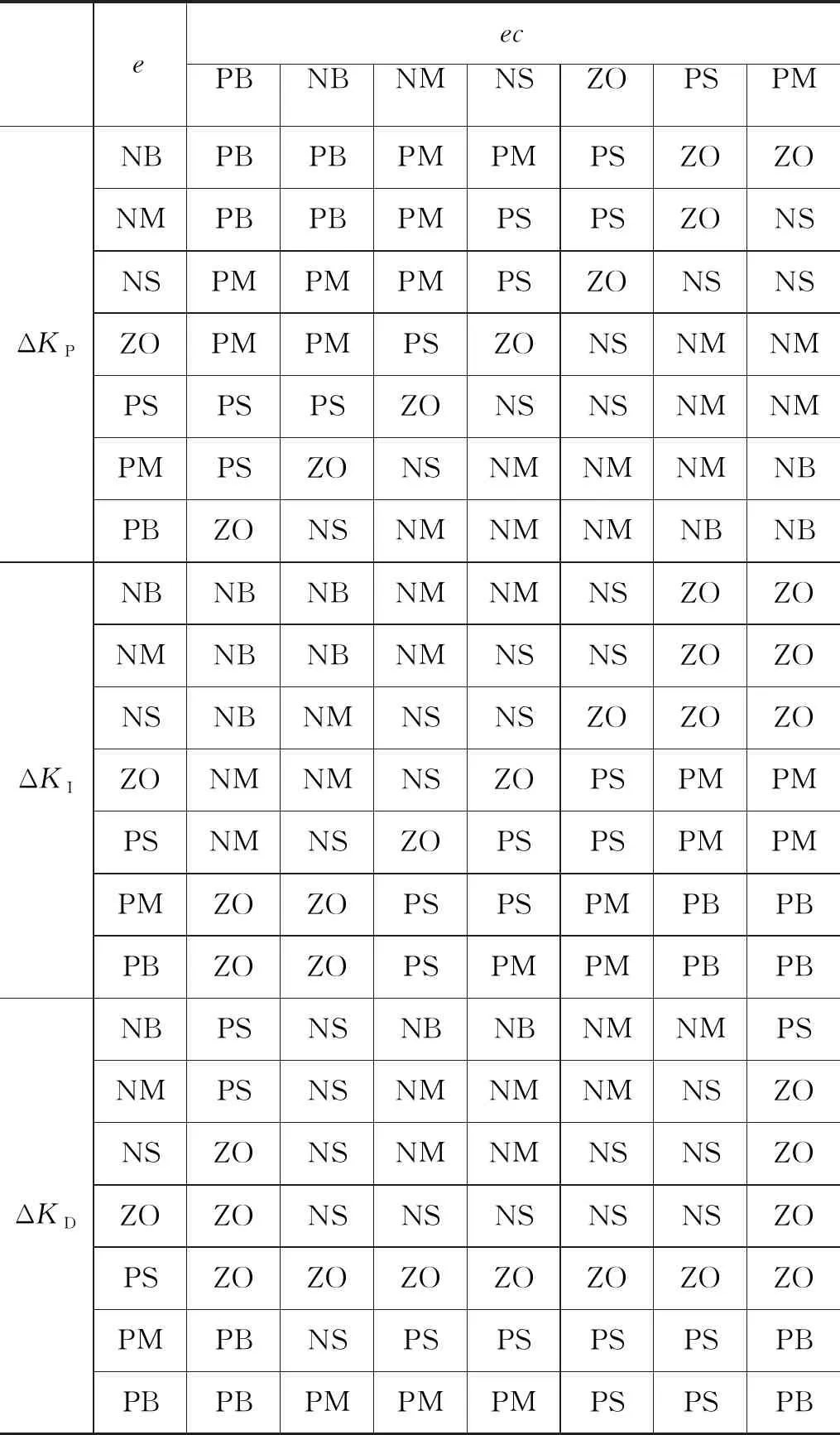
表1 ΔKP, ΔKI, ΔKD的模糊规则表
(4) 输出层,作用是输出PID控制器的3个控制参数,其计算公式为:
(20)
即:
(21)
式中,w为模糊推理层与输出层之间的连接权矩阵。
采用梯度下降法来调整神经网络参数,确定神经网络以确定网络权值,其方程式为:
cij(k)=cij(k-1)+Δcij(k)+
α[cij(k-1)-cij(k-2)]
bj(k)=bj(k-1)+Δbj(k)+
α[bj(k-1)-bj(k-2)]
w(k)=w(k-1)+Δw(k)+
α[w(k-1)-w(k-2)]

(22)
式中,e(k) —— 性能评价指标函数
η—— 学习速率
α—— 动量因子
4 试验与仿真分析
本研究采用模糊RBF神经网络PID控制,为了验证其效果在Simulink中进行仿真试验,所搭建的模糊神经网络PID控制仿真模块及其子模块如图9~图11所示。
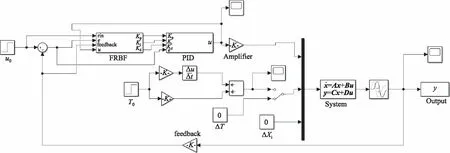
图9 模糊RBF神经网络PID Simulink仿真模块
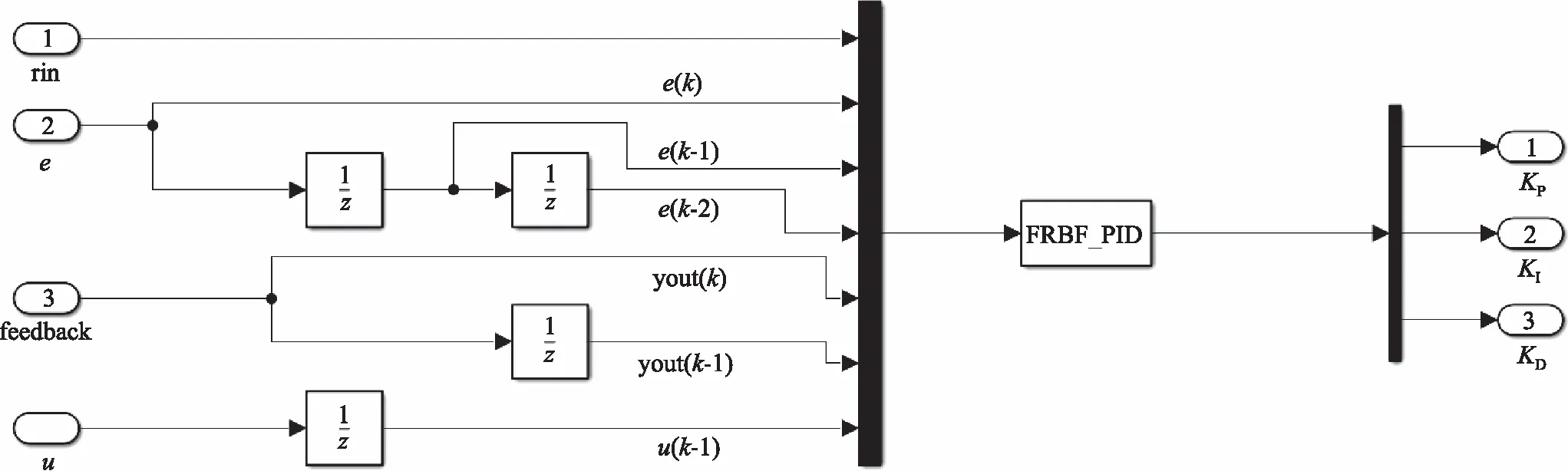
图10 模糊RBF神经网络子模块
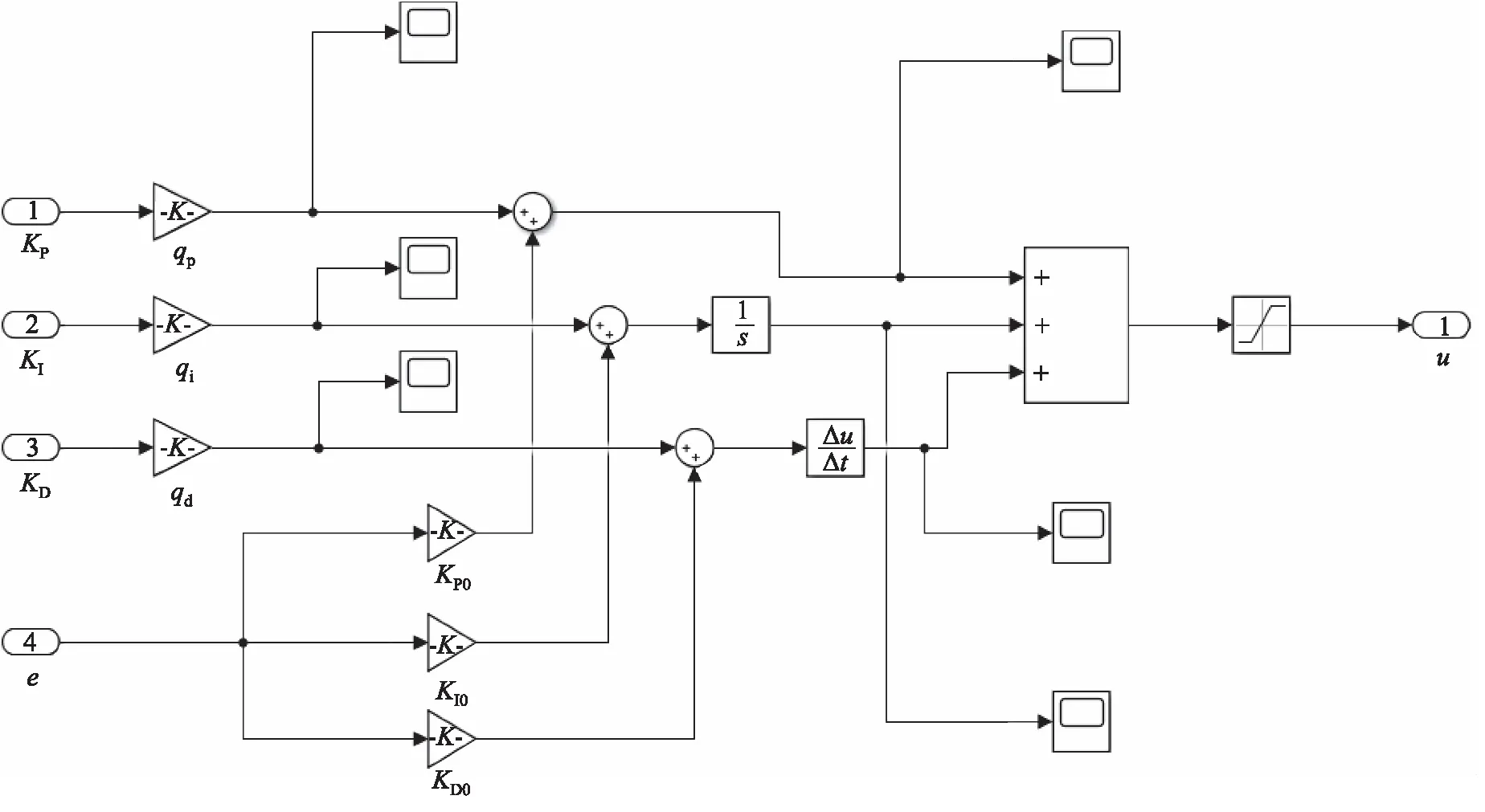
图11 自适应PID控制器子模块
在试验中,选择阶跃信号作为仿真的输入,为了验证本研究所选用的控制策略的效果, 加入了普通PID控制与模糊PID控制进行比较。
首先,设定在空载的情况下,在初始时输入12 V的阶跃信号,仿真时间为10 s,图12为仿真所获取的阶跃响应曲线。
由图12可以看出,采用普通PID控制不具备自整定能力,在Δ=0.02时,需3.62 s达到稳态,最大超调量为16.46%;采用模糊自整定PID控制,需3.39 s达到稳态,最大超调量为8.53%;采用模糊RBF神经网络PID控制,需2.8 s即可达到稳态,最大超调量为2.46%,有轻微的振荡,可见控制模糊RBF神经网络PID控制策略时间响应性能良好。
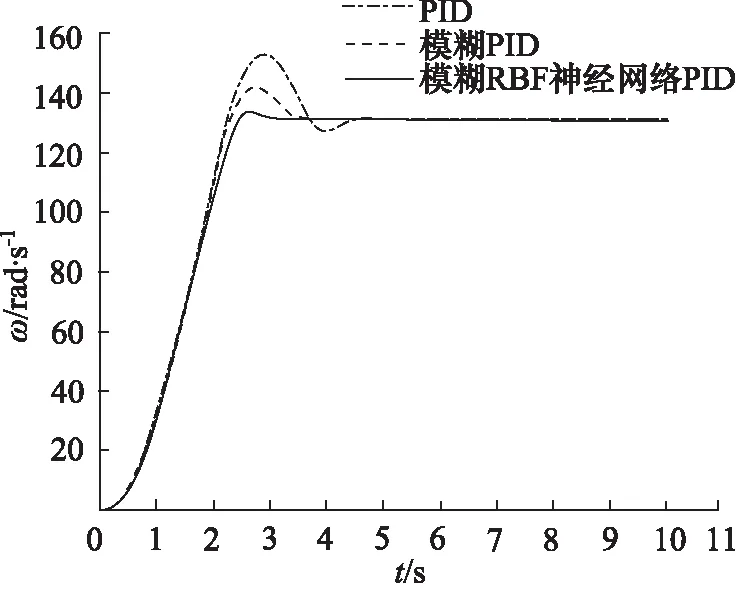
图12 3种控制方式下系统阶跃响应曲线(无载)
为了验证模糊RBF神经网络PID控制器在承载情况下的性能, 相同条件下, 在第5秒接入45.5 N·m的外部负载,得到系统的响应曲线如图13所示,模糊RBF神经网络PID控制系统相应的输入电压变化曲线和误差响应曲线如图14、图15所示。
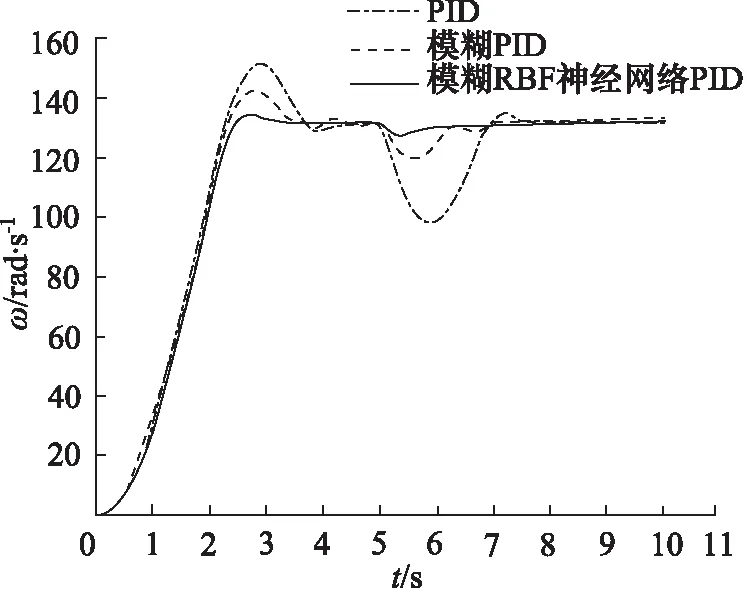
图13 3种控制方式下系统阶跃响应曲线(有载)
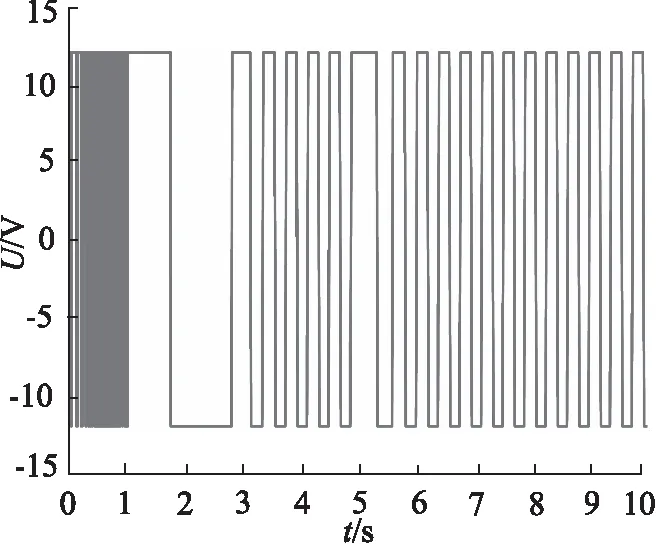
图14 模糊神经网络PID调节下输入电压变化
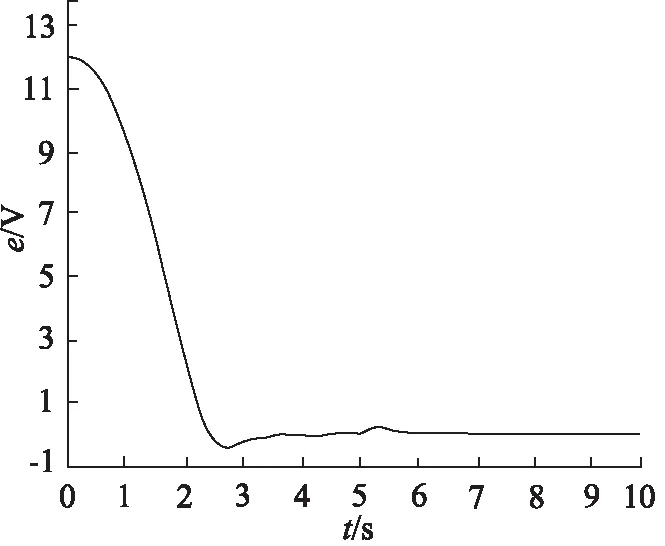
图15 模糊神经网络PID调节下误差响应曲线
在接入45.5 N·m负载后,瞬间产生一个53.5 N·m的负载冲击,在此冲击下,普通PID控制将会产生长达2.33 s、转速下降33.1 rad/s的转速波动;采用模糊PID控制,产生长达1.14 s、转速下降12.0 rad/s的转速波动;采用模糊RBF神经网络PID控制,产生长达0.54 s、转速下降4.04 rad/s的转速波动,可见模糊RBF神经网络PID控制策略承载鲁棒性良好。
综上所述,在空载和突然施加负载的工况下采用模糊RBF神经网络PID控制相对于一般PID控制和模糊PID控制而言,具有响应速度更快、鲁棒性更好的特点,能够很好地满足振动液压马达恒定转速输出振动,以使得油茶果从树枝上推摇脱落的机械化采摘作业要求。
5 结论
针对推摇式油茶果采摘机作业时振动液压马达保持恒速输出的转速控制问题,推导了该机振动部分阀控液压系统状态空间方程,并基于此设计了一种模糊RBF神经网络PID控制器,并对其在空载和5 s带载的情况进行仿真验证。仿真结果表明,采用模糊RBF神经网络PID控制方式,在振动液压马达恒速控制方面比一般PID控制和模糊PID控制方式响应速度更快、鲁棒性更好,能够更好地满足振动液压马达的转速控制要求。
