基于粒子图像测速技术(PIV)的自由游泳草鱼动力学特征分析
2021-11-17杨国党胡晓张奔龙泽宇张永年石小涛
杨国党,胡晓,张奔,龙泽宇,张永年,石小涛
(三峡大学 水利与环境学院,湖北省鱼类过坝技术国际科技合作基地,湖北 宜昌 443002)
相关研究成果和结论可对鱼类物理模型及仿生机器鱼研究提供科学参考。
许多水生动物,特别是鱼类,通常会通过改变游泳状态来适应环境变化,这种现象引起了科学界广泛的关注。鱼类能够准确感应身体周围的流动,通过将身体运动的动量传递给周围的流体,从而有效地控制推力的产生[1]。对于鱼类来说,它们传递给周围流体的动量和能量会以漩涡的形式包裹起来,研究者通过量化流体中的循环量,从而估计鱼体产生的推力和推进效率[2-4]。
鱼类在水体中运动时的瞬态流场变化是分析鱼类游泳动力形成的关键因素,而粒子图像技术(particle image velocimetry,PIV)能在不影响鱼类运动的情况下显示瞬态流场整体结构并保证测量的分辨率和精度[5]。近年来,随着科技的不断发展,PIV应用也愈发普遍,Stamhuis等[6]在测量鲻鱼幼鱼周围流场时首次引入该技术,PIV技术开始成为鱼类运动力学研究中的重要工具,并逐渐为研究者所接受。
目前,国内外学者主要通过对活鱼进行生物试验,以及对仿生鱼模型进行物理试验及数值模拟等手段研究鱼类游泳的运动力学机理。Tytell等[7]分析了美洲鳗鲡在稳定游动下的尾流结构并测量了其推进效率;Mwaffo等[8]研究了斑马鱼Daniorerio在机动和巡游两种运动模式下的涡结构和水动力压力分布;Akanyeti等[9]通过仿生学模型试验,验证了加速期间鱼尾部通过改变涡环几何结构来提高推进效率;Borazjani等[10]通过数值模拟研究了雷诺数和尾拍频率系统变化下鳗鱼运动的水动力学;Kazakidi等[11]通过数值模拟发现尾鳍的形状会影响鱼体的推进效率。研究鱼类在不同游泳状态下的推进机制与动力学不仅能为高效率的仿鱼类推进装置设计提供参数依据,还对理解水生动物的进化过程及其生物学作用具有一定的科学价值。前期相关研究大多集中于鱼类常见的游泳状态(如直线等),而对鱼类转弯和后退游泳状态的研究较少。本研究中,采用PIV试验结合涡量分析原理对草鱼Ctenopharyngodonidellus幼鱼在直线、转弯及后退3种游泳状态下的受力和推进效率进行了研究,分析了草鱼幼鱼在不同游泳状态转变过程中鱼体周身的涡量分布特征,通过对正向力和反向力的定量分析,得到了上述3种游泳状态下幼鱼高效的行为方式,
1 材料与方法
1.1 材料
试验用鱼为常见的淡水鱼草鱼幼鱼,购自湖北省宜昌市某养殖场,共15尾,平均体长为4~10 cm,暂养在圆形养鱼池中,水温保持在(20±1)℃,每周投喂两次,试验前24 h禁止摄食[12]。
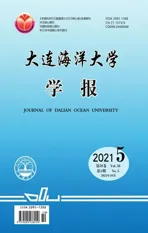
试验装置如图1所示,包括一套PIV系统(光源系统、同步系统、图像拍摄系统、图像分析系统)和透明的有机玻璃水槽(长×宽×高为0.46 m×0.20 m×0.25 m)。
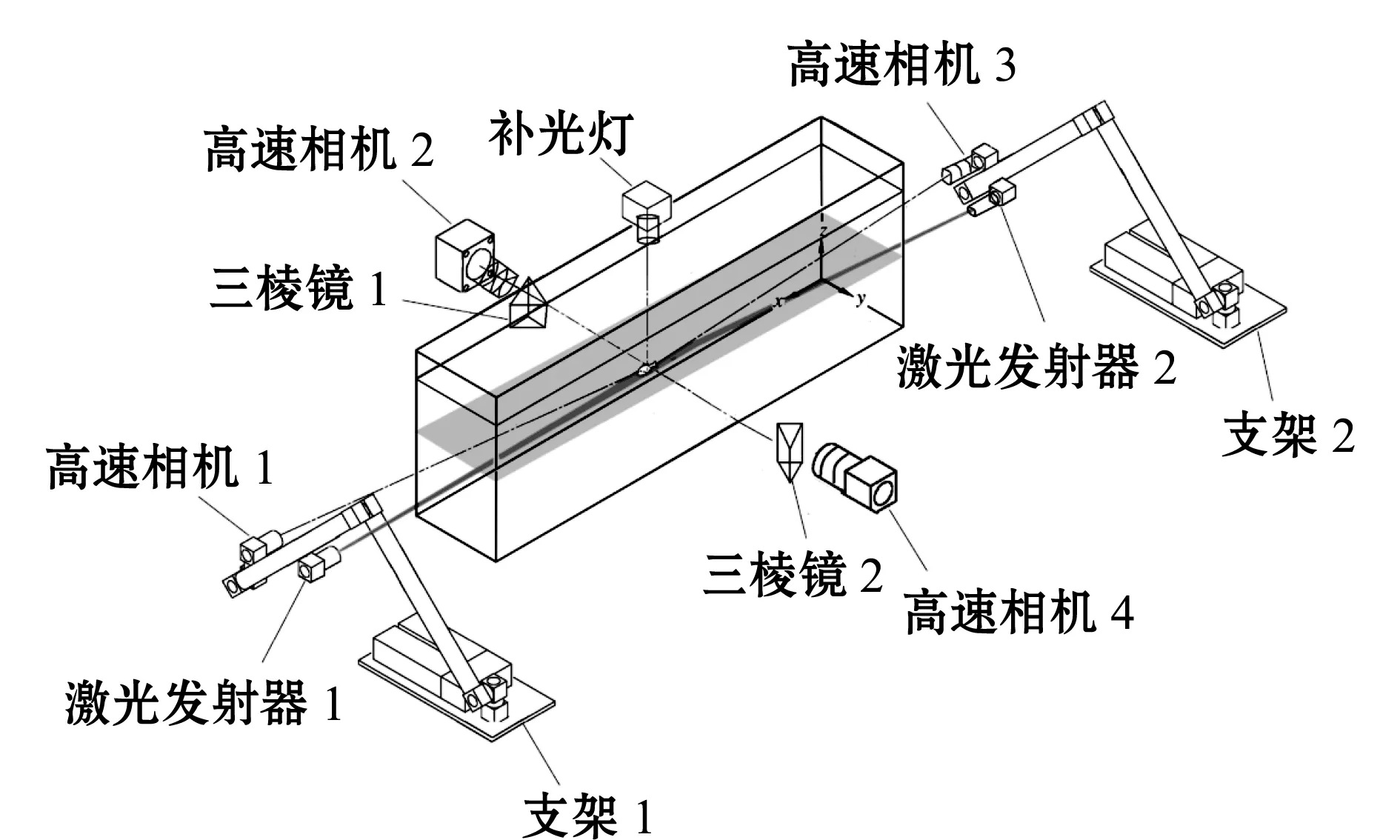
图1 试验装置图
1.2 方法
1.2.1 试验设计 试验于三峡大学生态水利学实验室进行,试验时水槽内水深为0.1 m,示踪粒子选用随水性良好的空心玻璃微珠(粒径为20~30 μm),在水槽前后两侧分别安装激光器(型号为NQ-506,波长为532 nm,功率为100 mW)1和2,在四周分别架设一部高速摄像机(Redlake Motionscope,分辨率为640 pixel×480 pixel,帧率为120 fps),视场范围为12 cm×9 cm。整个试验在无光和无外界干扰的条件下进行,为了防止粒子图像可见度减弱和两侧氩离子激光器发生散射,将一块贴黑纸的薄玻璃隔板放在试验区域的正下方。试验选用澄清的自来水(试验前静置48 h),通过摄像机捕捉草鱼幼鱼在静水环境下的自主前进、转弯及后退行为,每条鱼单独进行试验,每次试验持续时间为30 min。根据实验生物学要求,同一试验鱼不再重复试验,避免对试验结果造成影响[13]。
1.2.2 数据处理 试验获得的草鱼运动图片采用开源程序PIVlab获取原始的流速场(有完整鱼体),提取鱼体周身的涡量和速度,导入Surfer软件中将整个流场进行细分,获得涡环在二维水平面上的投影面积及涡量,推导计算各部分的作用力(利用Matlab对一个摆尾周期内的鱼体周身进行作用力计算)。由于鱼体在5次摆尾后尾拍幅度和游动速度不断下降,直到第7次摆尾后,草鱼幼鱼保持身体笔直,开始滑行,所以本研究中选取1到5次摆尾间的数据进行数字化图像处理[14]。为便于分析鱼的运动,定义草鱼幼鱼向前波动的过程中,鱼从几乎顺直状态开始摆尾一个来回,这个过程的历时定义为一个周期T,选取的直线、转弯和后退游泳期间完成一个摆尾的运动周期T分别为300、575、400 ms。整个过程由于粒子数据较多,前期主要通过人工手段提取鱼体周身的粒子,用于具体分析每一部分受力变化,本试验中结合Triantafyllou等[15]的研究理论,通过周身涡流的变化强度将鱼体划分为3部分,如图2 所示,将吻端至胸鳍间的区域定义为头部,将胸鳍至臀鳍间的区域定义为中部,将臀鳍至尾鳍后部的区域定义为尾部,然后分析每一帧下不同部位数据的变化,由于数据过多,每张粒子图像下的数据变化较小,故将其在时间上进行划分。
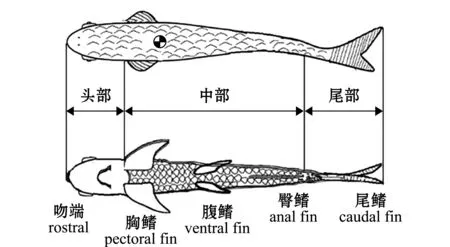
图2 鱼体部位划分示意图
1.2.3 相关力学计算原理 鱼体的每次波动都会产生涡环,通过涡环可以获取施加于鱼体上的作用力。首先,获取不同粒子的速度大小及分布,计算鱼体周身涡量分布和沿涡环的速度环量,其计算公式[16]为

其中:Ω为涡量(1/s);u、v分别为粒子的水平速度和竖直速度(m/s);Γ为速度环量(m2/s);v′为粒子的速度(m/s);l为涡环的周长(m)。
根据单位时间速度环量面积的变化,作用在幼鱼鱼体上的瞬时作用力计算公式[17]为

(3)

(4)


图3 鱼体受力示意图
由于鱼体的每次波动都会产生作用力,每次产生的作用力又会随射流角度的变化而发生改变,根据其力的作用效果不同,可将其分为沿鱼体切向方向的推力(FT)及法向方向的侧向力(FL),并通过涡环在不同平面上的投影面积计算相应的作用力,公式[19]可以改写为
其中:Axy为涡环在xy平面上的投影面积(m2);Ayz为涡环在yz平面上的投影面积(m2);Γ为速度环量(m2/s);当鱼体波动前行时,尾部通常伴随有大振幅,头部会存在一定的小振幅,头部在游泳时大致是刚性的[20],因此,幼鱼每一时刻头部中线与起始平直状态中线间都会形成一定的夹角θ,定义为头部偏角[8,21](图3(b))。
通过计算流体动力学得到鱼类游泳的推进效率(η),其计算公式[22]为
η=FTuaxial/(FTuaxial+Plateral),
(7)
Paxial=FLulateral。
(8)
其中:FT为推力(N);FL为侧向力(N);uaxial为幼鱼的水平游泳速度(鱼体质心的水平位移与相应时间的比值,m/s);ulateral为幼鱼的侧向游泳速度(鱼体质心的竖直位移与相应时间的比值,m/s);Plateral为幼鱼侧向运动损耗的功率(W);Paxial为幼鱼水平向运动损耗的功率(W)。
2 结果与分析
2.1 不同游泳状态下草鱼幼鱼周身的受力变化
2.1.1 直线游泳状态下的受力变化 结合图4的云图和图5的曲线可以看出,草鱼幼鱼完成一个摆尾周期(T)的直线游动过程,鱼体周身的正、负涡作用力之比可达1.6∶1(图5(a)),其中幼鱼尾部主要聚集正涡,头部聚集负涡(图4),上述两个部位一个运动周期内所形成的正、反向力平均比例分别为43%和34%,如图5(d)、(b)所示。

图4 直线游泳时鱼体涡量云图
在运动的前1/8周期,幼鱼尾部是正涡的主要聚集区域,该阶段尾部由正涡所产生的作用力占鱼体总正向力的比例接近60% (图5(d)),之后正涡逐渐向鱼体胸鳍部位聚集,鱼体中部正向力的比例开始上升并在1/2周期达到最高点,如图5(c)所示,尾部由正涡产生的作用力开始下降,此后正涡逐渐由中间部位向尾部扩散。在整个直线游泳过程中,鱼体有63%(33.74 mN)的正向力被抵消不做功,只有37%(19.88 mN)的正向力对鱼体做功,其中大部分集中在鱼体尾部(图5(a))。
图5 直线游泳时鱼体各部分受力
2.1.2 转弯游泳状态下的受力变化 草鱼幼鱼在转弯时,鱼体的弯曲方向与鱼头转弯的方向刚好相反,幼鱼的摆尾幅度增大,摆尾频率降低,试验结果显示,在头部偏角相同的情况下,转弯时草鱼幼鱼前进的距离要远小于直线游泳状态。
从图6和图7(a)可知,幼鱼完成一个周期的转弯游动过程,鱼体周身的正、负涡作用力之比为2.2∶1,整个转弯过程中,有45%(29.4 mN)的正向力被反向力所抵消不做功,实际作用于鱼体的力只有55%(36.3 mN),其中,尾部为正涡的主要聚集区域,一个运动周期内由尾部正涡所形成的正向力占总正向力的比例平均为55%。
图6的涡量云图显示,在运动的前1/16周期,幼鱼头部聚集的正、负涡呈上升趋势,此时头部涡体产生的正向力所占比例高达60%(图7(b)),之后正涡逐渐向鱼体中部和尾部扩散;在1/2周期时刻,幼鱼鱼体的弯曲程度最大,鱼体尾部的正向力、反向力所占比例分别达到最高值64%、80%(图7(d)),而鱼体中部则聚集了较多负涡(图7(c)),该部位由负涡所形成的反向力比例平均可达32%。

图6 转弯游泳时鱼体涡量云图
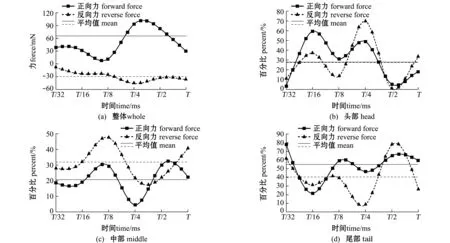
图7 转弯游泳时鱼体各部分受力
2.1.3 后退游泳状态下的受力变化 草鱼的后退游泳行为,在生物力学上表现出不同差异(当草鱼遇到狭小空间或无法继续前进时,就会出现后退游泳行为)。整个后退游泳过程中涡量云图如图8所示,涡量首先在幼鱼的头部聚集,然后沿鱼体长度方向逐渐向幼鱼的中部、尾部扩散,之后再次聚集和扩散,导致幼鱼各部位的正向力、反向力呈现出周期性的波动。如图9(a)所示,草鱼幼鱼完成一个周期的后退游动过程,幼鱼尾部聚集正涡和负涡的区域逐渐减小;相对直线游泳和转弯状态而言,鱼体尾部的正向力和反向力所占比例有一定程度下降(图9(d));鱼体中部主要聚集负涡,该部位在一个运动周期内产生的反向力所占比例平均可达41%(图9(c));虽然幼鱼头部的正向力、反向力波动较大,但其平均值仍维持在较高水平(图9(b))。

图8 后退游泳时鱼体涡量云图

图9 后退游泳时鱼体各部分的受力
2.2 不同游泳状态下草鱼幼鱼的推力和侧向力
通过对试验数据进行分析发现,草鱼幼鱼在直线游泳状态时,有高达73%的正、负涡合作用力转化为推力,且该推力主要产生在幼鱼尾部,剩下的涡合作用力则转化为侧向力,主要用于尾部的横向摆动和头部的偏转;转弯游泳的幼鱼将52%的涡合作用力转化为推力,相较于直线游泳,幼鱼头部推力的比例在逐渐降低,仅为直线游泳的50%,此外,由于转弯时草鱼幼鱼的整体偏转角度增大,使得鱼体的推力分量大幅下降(图10(a)、(b));相对前两种游泳状态,后退游泳产生的作用力相对较小,其中有66%的涡合作用力转化为推力,其余的转化为侧向力,虽然推力的利用率整体增大,但由于正、负涡的合作用力相对较小,故后退时的幼鱼推力较小(图10(a)、(b))。

图10 不同游泳状态下鱼体周身的推力及侧向力
2.3 不同游泳状态下草鱼幼鱼的推进效率
本研究中结合草鱼幼鱼周身的受力特征,对其头部、中间部位和尾部的推进效率进行了分析比较,结果如图11(a)~(c)所示,发现直线游泳和转弯时的幼鱼尾部推进效率最高,其次是中部和头部;当幼鱼后退状态时,鱼体的高效推进在中部,头部推进效率最低。

图11 草鱼幼鱼不同部位的推进效率
通过对幼鱼直线、转弯和后退3种状态下的整体推进效率比较发现:直线游泳的幼鱼整体推进效率最高,其次分别是转弯和后退游泳状态;当幼鱼的头部偏角为9°~10°时,直线游泳的整体推进效率最高,为83%;对于转弯的草鱼幼鱼,其整体推进效率在头部偏角为14°~15°时最高,为74%;后退游泳时,草鱼幼鱼的头部偏角为3°~4°时,其整体推进效率达到最大值65%。
3 讨论
3.1 不同游泳状态下的动力学差异
在不同的水环境中,鱼类为了特定目的进化出各种各样的运动策略。鱼类通过肌肉变形作用于流体,带动周围流体的运动,同时受到流体的反作用力而推动自身前进[23]。Müller等[24]研究发现,鱼体周身涡结构是沿体表下移直至尾部脱落,这与本研究中的分析结果一致。一些研究发现,鱼体整个身体对推力产生都有一定贡献,另有研究提到尾鳍在产生推力方面的重要性。当尾鳍产生的涡强度较大,其产生的推力更大[25]。本研究中发现,草鱼幼鱼在近似直线运动过程中,正、负涡合作用力对推力的贡献作用高达73%,且该推力主要产生在幼鱼尾部。相比之下,草鱼幼鱼转弯时有较高的推力和侧向力,但是其转弯时的整体偏转角度增大,使得正、负涡合作用力转化成推力的分量大幅度下降。另外,鱼体转弯时脱落的涡环的动量可以促使鱼加速运动[26]。本研究中发现,草鱼幼鱼后退时主要靠胸鳍划动后退,鱼体周身涡量变化主要与其中部的胸鳍划动有关,相比直线、转弯时鱼体借助尾部的主要动力来源,鱼体后退过程中正、负涡的合作用力整体相对较小,因此,后退时呈现较小的推力。由于鱼体和流体相互作用的复杂性,未来应开展三维涡量研究,进一步阐明草鱼幼鱼产生的尾流涡结构,这有助于对鱼尾涡结构进行分类和作用机理的认识。
3.2 鱼体头部偏转角度对推进效率的影响
在自由游泳中,鱼体有角度的偏转与流体的相互作用对其整体推进效率有重要的影响[27]。鱼类通过周期性激活肌肉来控制头部偏转角度,以补偿侧滑加速[28]。这说明鱼体头部压差降至最低时,可减少流体阻力,并提高推进效率。另外,Nair等[27]研究发现,斑马鱼幼鱼尾部偏转角度与头部偏角呈线性关系。这说明鱼体头部控制对于通过转向、身体旋转和侧向平移来提高游泳效率至关重要[29]。本研究中发现,3种不同游泳模式下鱼头偏转角度不尽相同,与转弯头部偏转角度相比,直线游泳头部偏角为9°~10°时就可以达到83%的推进效率。这说明转弯头部偏转幅度增加并不意味着涡环产生的动力成本低于直线游泳产生的动力成本。这主要是由于试验幼鱼转弯时尾部涡动力产生与游泳方向相反的力,需要较大外力矩实现转弯,最终导致游泳速度大大降低,因此,运动效率相对较低。张冰冰[30]也发现,鱼体转弯比“S”型波动前进会产生较小的力矩和推力,故前进角度大但推进效率小。实际中,除了鱼体头部偏转以外,鱼体常表现出空间俯仰角度和横摇角度变化,需进一步研究鱼体这些行为引起涡动力的变化情况。
3.3 不同游泳状态下的推进效率差异
推进效率是鱼类动力学研究的重要指标, 是衡量鱼类游泳能力的主要评判标准之一。王睿等[31]对仿生鱼研究发现,仿生鱼的推进效率远低于自然界中的鱼类,其原因在于仿生鱼的尾流结构并未根据身体其他部位的变化进行整体性协调。自然界的鲤科鱼类,鱼游泳前期主要是通过尾部产生推力,后期利用头部和胸鳍的偏转来抵抗周围水体阻力,而仿生鱼只完成了鱼体前期运动,这也是仿生机器鱼的水力学特性高于实际鱼体,但游泳效率却低于实际鱼的主要原因。本文结合草鱼幼鱼的游泳速度对其推进效率进行研究,可以得到不同游泳状态下幼鱼的最佳游泳方式。
本研究中发现,在直线和转弯中鱼体尾部相比头部和中部具有较高的推进效率,而两者随体长变化不尽相同。这也证明了鱼体尾部是其前进的主要动力来源。Chen等[32]研究鱼在流体中高效推进机理时发现,推进效率随着游动波速的升高而增大。
本试验中幼鱼在后退时中部推进效率贡献高于头部和尾部,推测可能与鱼体中部波速有关。Wardle等[33]通过研究鱼体体波时序和肌电图(electromyogram,EGM)的区别时发现,肌肉时断时续产生额外能量,部分时间做负功甚至不做功,这可能是鱼类具有高推进效率的原因。实际中,在具有来流的条件下,鱼类常表现出顶流前进、顶流后退、趋流转换等行为,因此,需进一步研究以提高对鱼类推进机理方面的认识。
4 结论
本研究中利用PIV技术结合涡量理论定量分析了草鱼幼鱼在直线、转弯及后退游泳状态下的动力学特征,主要得出以下结论:
1)草鱼幼鱼在直线和转弯游泳时主要依靠尾部聚集的正涡产生推力,而后退时则主要依靠鱼体中间部位的负涡形成反向力,来推动自身前进。
2)对不同游泳状态下草鱼幼鱼所受推力和侧向力分析发现,直线游泳的幼鱼推力转化率最高可达73%,转弯时的正、负涡合作用力有48%用于头部和胸鳍部位的偏转,后退时的幼鱼涡合作用力转化率为66%,但是对应的推力却相对较小。
3)对草鱼幼鱼不同游泳状态下的整体推进效率进行对比分析得到,直线游泳的幼鱼整体推进效率最高可达83%,其次是转弯和后退游泳状态,幼鱼最高推进效率分别为74%和65%,试验数据显示,较小的头部偏角更有利于幼鱼的高效推进。