某电动机构齿轮副静态接触与动力学仿真
2021-11-17赵路明刘志明
彭 瑾,赵路明,刘志明
(1.空装驻北京地区第三军事代表室,北京 100074;2.北京动力机械研究所,北京 100074)
1 引言
电动机构广泛应用在各种飞行器中,它通过电机和减速机构驱动负载转动或平移,同时将位置信号反馈给上位机,是飞行器的重要组成部分[1][2]。某电动机构的转动是通过小模数齿轮副的旋转带动的。齿轮传动具有功率范围大、传动效率高、传动比准确等特点,但齿轮也是容易出现故障的零件之一,据统计,在各种机械故障中,齿轮失效占总数的60%以上,其中齿面损坏又是齿轮失效的主要原因之一[3],传动齿轮应力分布情况和应力变化情况尤为复杂,传统的赫兹接触理论分析方法是在许多假设的前提下推导的,存在一定的局限性,特别是齿轮模数较小、功率密度较大时,受齿轮动态啮合过程的影响,常规的恒值啮合力计算方法不能准确地反映齿轮的工作状态,且动态载荷会加速齿轮的疲劳失效。在承载接触问题的研究方面,文献[4]提出了齿轮承载接触问题分析的模型和方法,文献[5]基于ansys实现了齿轮建模及有限元分析。张延杰等对齿轮传动进行了有限元静态接触分析,获得了齿轮副的应力应变[6],江志祥等对齿轮传动进行了动力学仿真,获得了啮合力-时间历程曲线并研究了不同工作条件下啮合力-时间历程的变化情况[7]。郭会珍等在参数化模型的基础上,通过ADAMS动力学仿真建立了齿轮传动的动力学模型[8]。当前鲜有见到中心距对齿轮传动静态接触及动力学影响的分析。
为了准确地分析中心距超差对某电动机构齿轮传动失效的影响,对某电动机构齿轮副进行有限元静态接触仿真,得到一个啮合周期内的应力分布情况。在此基础上,用多体动力学软件ADAMS进行不同中心距条件下的动力学分析,研究齿轮副啮合力、速度、加速度情况的变化。该方法更符合电动机构的实际工况,是给出中心距超差对某电动机构齿轮传动失效影响分析的重要依据。
2 模型建立
某型电动机构在试验过程中发生不动作故障,故障现象为发送控制指令后产品不动作,有小幅工作电流,电机发出声音。将产品分解检查,齿轮设计齿顶圆直径Φ3.5mm,分度圆直径Φ3mm。故障电机齿轮外径为Φ2.6mm,齿形磨损严重。如图1所示。
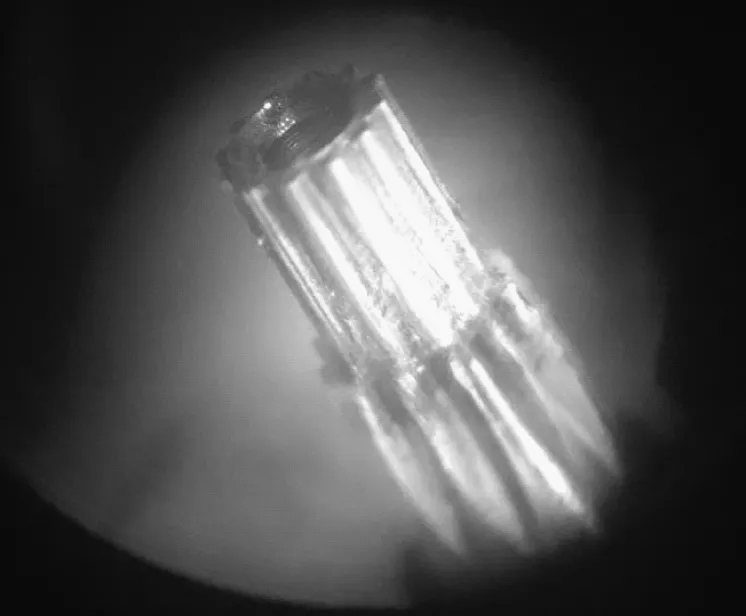
图1 故障齿轮副磨损情况
该型电动机构的传动系统分为二级传动,其中第一级为齿轮副传动,第二级为蜗轮蜗杆传动。如图2所示。

图2 传动示意图
齿轮副的上一级为原动电机,输出扭矩为0.06Nm,转速5000r/min,齿轮副为第一级传动副,将电机输出扭矩传递至下一级蜗轮蜗杆减速结构,齿轮副主要参数如表1所示。主从动齿轮材料均为42CrMo,材料密度为7860kg/mm3,弹性模量2.07e5,泊松比为0.25,拉伸强度为1080MPa,屈服强度为835MPa[9]。传动比i=8.33。
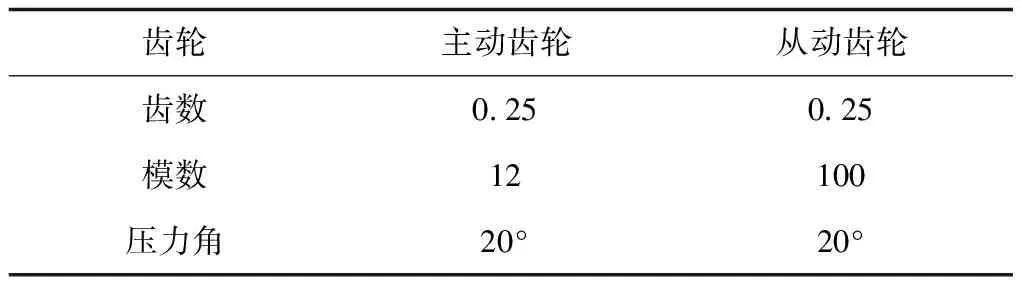
表1 齿轮副主要参数
为了分析齿轮在啮合过程中的应力情况,采用机械设计软件UG_NX对齿轮副进行建模。齿轮传动是典型的接触问题,故障齿轮副主要是轮齿的失效,齿轮其它部分的刚度和强度裕量较大,很难发生破坏,考虑到整个齿轮的接触问题计算量较大,为了提高计算效率,截取主动齿轮的5个齿和从动齿轮的4个齿进行建模与仿真。
3 静态接触分析
材料属性采用毫米单位制,材料为各向同性的合金钢材料,考虑到齿轮损伤主要发生在轮齿上,因此对轮齿周围进行网格细分,其它部分进行粗糙划分。为保证计算的精度和缩短计算的时间,选用SOLID185单元,通过在齿轮各边上设置单元大小来控制网格密度,采用以上方法进行网格划分之后进行网格质量检查,通过修改得到质量较高的网格。在定义接触时,接触面的选择非常重要,主动面可以侵入从动面,而从动面不能侵入主动面,将主动面采用更细的网格划分,选取如图3所示的2对接触面进行静态接触分析。

图3 齿轮副有限元模型及接触面
由于齿轮之间的接触是非线性的,采用罚函数接触算法和面对面接触方式进行计算,罚参数大小与计算效率和精度有关,罚参数越小计算误差越大,但参数增大计算效率降低,由于单元离散本身有误差,计算精度不会有明显提高,通常取1至10倍弹性体弹性模量。
齿轮有限元的静态接触分析中,除满足弹性静力学基本控制方程外,在啮合齿面上还需分别满足法向与切向接触条件。法向接触条件指的是主从动齿面是否进入接触以及已进入接触应该遵守的条件,即位形不可贯入的运动学条件和法向接触力为压力的动力学条件。切向接触条件是判断已进入接触的两齿面间的具体接触状况及其服从的条件,一般采用库仑摩擦模型。有摩擦啮合齿面上的接触状态分为三类边界条件,即粘结状态、滑动状态和分离状态。求解时先定义啮合面的接触状态和接触区域,计算按符合判定条件的接触状态对应的边界条件进行[10]。
为了与实际齿轮啮合一致,齿轮之间设置小滑移,接触类型为硬接触,摩擦系数为0.1。在齿轮轴建立柱坐标系,主动轮只保留周向转动自由度,在齿轮轴的参考点定义一个转矩M,将扭矩施加在中心孔节点上,从动轮全约束。
提取主动轮中间齿轮从进入啮合到退出啮合过程中若干位置的最大齿面接触应力如图4所示。
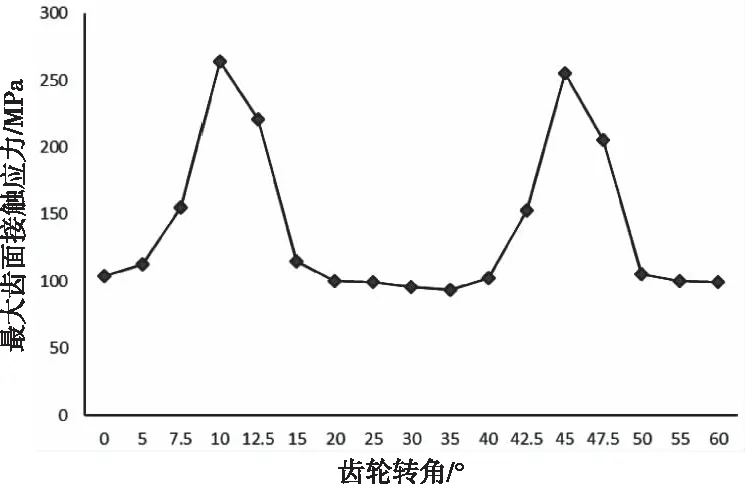
图4 啮合过程中齿面接触应力变化情况
齿轮副在传动过程中经两对齿啮合和1对齿啮合的交替变化,从图4可以看出,整个啮合过程中接触力呈周期性波动,一个轮齿啮合周期内转角为30°,最大齿面接触应力263.94MPa,发生在单齿接触时,在多齿接触时最大接触应力会出现明显下降。由于齿轮是渐开线接触,传统的赫兹接触理论的结果是近似的,特别是考虑摩擦的情况下。采用理论分析方法只能求出沿接触面法向上的应力,采用有限元仿真可以得到任意时刻任意节点的应力情况。
取最大接触应力位置进行后续分析,齿面接触应力云图和等效应力云图如图5所示,从图中可以看出最大接触应力位置出现在节圆附近。齿面接触线平行于齿轮轴线。在啮合传动过程中,轮齿的齿根部分以及主动齿与从动齿的接触部分应力最大,如图6所示,齿根部分容易发生折断,齿面部分容易出现磨损、胶合等失效形式,这与工程应用中的实际情况是一致的[11]。

图5 齿面接触应力云图

图6 齿轮等效应力云图
对于故障齿轮副,接触线附近位置的等效应力大于远离接触线位置的等效应力。同时在啮合过程中齿根产生的弯曲应力比齿面产生的接触应力要小。理论计算中,齿轮弯曲应力计算公式为
(1)
式中
YFS:复合齿形系数;
K:载荷系数;
T:扭矩;
b:齿宽;
m:模数;
z:齿数。
齿轮副轮齿复合齿形系数YFS=4.1658,载荷系数K=1.5,扭矩T=0.06,齿宽b=4,模数m=0.25,齿数z=12,根据齿根弯曲疲劳强度校核公式得到齿轮的疲劳强度为63.3Mpa,与仿真结果一致,与齿轮副传动过程中齿面先发生破坏的现象吻合。
4 动力学分析
利用多体动力学仿真软件 ADAMS 建立动力学模型,对齿轮副传动的动学行为进行仿真分析,从而可以对物理样机进行虚拟仿真,分析齿轮啮合传动时轮齿啮合力的变化规律,为故障分析 提供更加可靠的数据。
利用UG将齿轮建模并装配,然后将装配体导入ADAMS中。在Adams中可以用冲击函数法和补偿法计算接触力。对于冲击函数法,碰撞力P主要由接触刚度系数K、最大阻尼时的切入深度d、阻尼系数C和碰撞力指数e决定。假设齿轮啮合过程中接触面积为圆形,碰撞力由Hertz静力弹性接触理论得到,考虑接触面积为圆形时
(2)
碰撞时接触法向力P和变形δ的关系为P=Kδ(3/2)。式中,K取决于撞击物体材料和结构形状
(3)
式中
(4)
R1、R2为接触物体在接触点的当量半径
(5)
式中,u1、u2为两接触物体材料的泊松比,E1、E2为两接触物体的弹性模量。将齿轮及材料参数代入可得E=1.13e5N/mm2,K=8.39e5 N/mm2。采用库仑法确定两齿轮间的摩擦力,两齿轮按润滑处理,取动摩擦因数为0.05,静摩擦因数为 0.08,静态摩擦转变速度为 0.05mm/s,动态摩擦转变速度为1mm/s。
仿真过程中,在主动轮上加恒转速驱动30000°/s,在从动轮施加负载转矩,为了使施加的负载不出现突变,使用step函数使负载在0.2s内平缓增加。仿真时间0.1s,步数1500步,采用WSTIFF求解器SI2积分格式进行求解计算,并截取较为稳定的仿真结果进行分析[12]。图7为从动齿轮的输出转速曲线。

图7 从动齿轮输出转速
图7 可以看出,去除初始冲击,输出转速有波动比较平稳,但波幅并不衰减,由于齿轮周期性啮合,波动曲线呈明显的周期性,并且当进入平稳传动阶段时,平均角速度为3617.4°/s,和理论值3601.4°/s 基本符合,仿真模型满足要求。
从动齿轮的角加速度时域及频域曲线如图8所示。由于给定了主动轮初始速度,造成从动轮在开始阶段出现了较大的初始加速度,当0.02s后负载扭矩达到稳定值,进入正常啮合过程。电动机构齿轮副为第一级传动机构,齿轮副模数小、负载小、转速高,加速度波动幅度较大。正常啮合过程中最大值4.96×106°/s2。从频域图上看,加速度的波动有一定的周期性,这是齿轮周期性啮入、啮出冲击引起的。
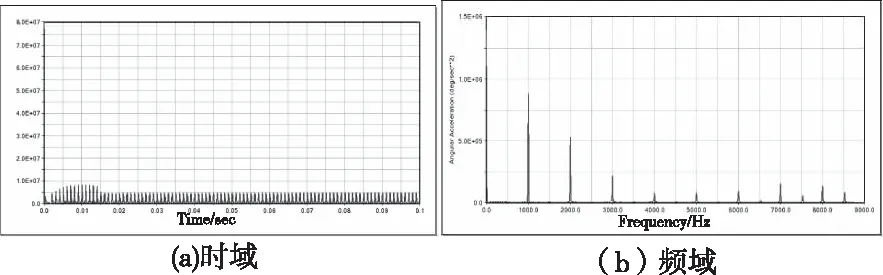
图8 从动齿轮角加速度时域及频域曲线
齿轮副动态接触力的时域及频域变化曲线如图9 所示,与角加速度相似,齿轮副接触力同样呈周期性变化,周期为一个轮齿啮合所需的时间。由于所加载荷为静态负载,齿轮之间的接触力在某一值以上波动,该值约为 56.1 N,与理论计算值 56.33 N 相近,在啮入、啮出的冲击阶段,啮合力最大值为96.4N。平均值61.65N.

图9 齿轮副接触力时域及频域曲线
表2给出了仿真得到的输出转速、啮合力与理论计算值的对比结果。输出转速和啮合力的仿真结果与理论计算结果分别相差0.44%和 0.4%
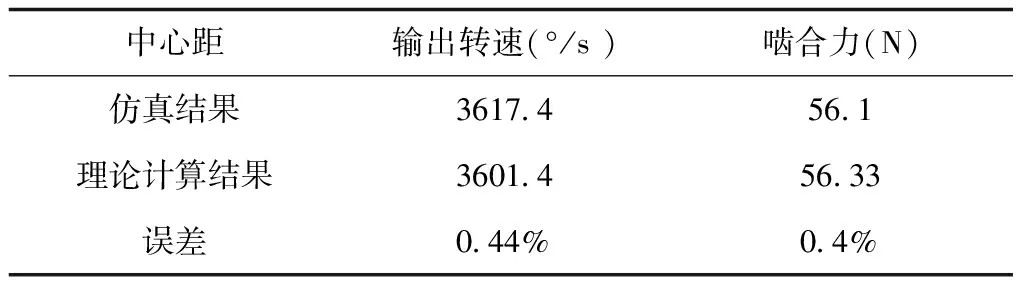
表2 仿真结果与理论计算结果对比
5 中心距对齿轮传动的影响
故障电动机构齿轮副理论中心距为14mm,实测电动机构故障件传动中心距为14.148mm,将齿轮副模型导入ADAMS中进行动力学仿真,从动齿轮输出转速如图10所示。
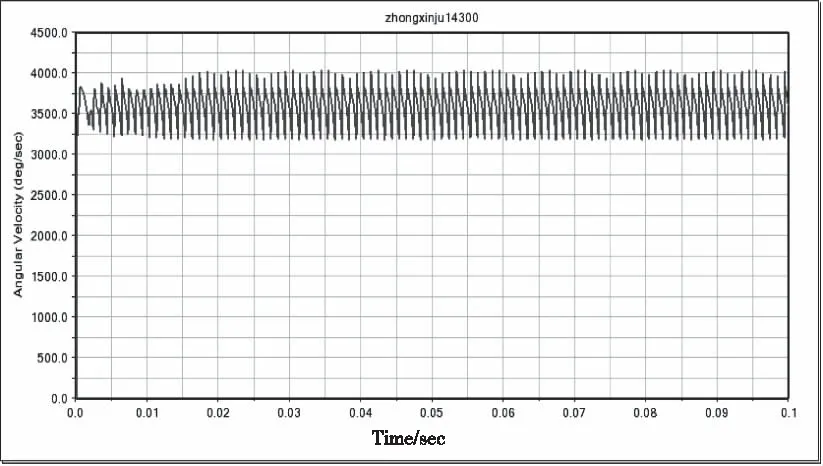
图10 故障件从动轮输出转速
从图10中可知,从动轮转速平均值为3613°/s,但转速波动明显变大。
当中心距增大时,齿轮传动实际啮合线的长度与基圆齿距的比值,即重合度减小。直齿轮传动中,重合度

(6)
式中α′为啮合角,αa1、αa2分别为两齿轮的齿顶压力角
(7)
(8)
(9)
其中,a为齿轮副的理论中心距,a′为齿轮传动实际中心距。当实际中心距增大时,啮合角减小,重合度降低。对一般使用场合,外啮合直齿圆柱齿轮的许用重合度[ε]取1.3~1.6。为了使齿轮能够连续传动,重合度应大于1,既前一对齿轮脱离啮合时,后一对齿轮就要进入啮合[13]。将电动机构齿轮副参数带入公式中,求得重合度如表3所示。
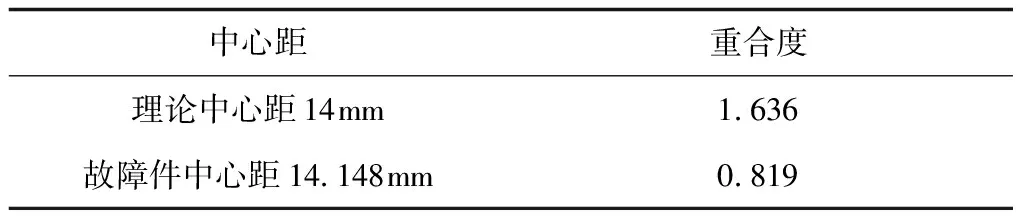
表3 齿轮副重合度
故障件中,齿轮副传动中心距过大,使前一对齿轮脱离啮合时,后一对齿轮还未进入啮合。啮合过程中,角加速度及啮合力如图11、图12所示。

图11 从动齿轮角加速度时域及频域曲线
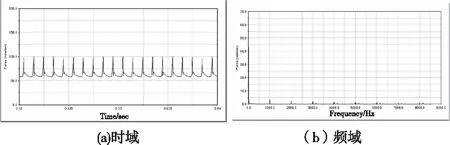
图12 故障件接触力时域及频域曲线
啮合过程中,角加速度最大值由标准中心距时4.96×106°/s2增加至1.28×107(°)/s2,接触力最大值增加至100.96N。从频域上看,高频段的幅值增加,在3000、4000、5000、6000、7000、8000Hz附近出现新的波动,这是由于重合度过小导致的啮合不稳定造成的。中心距的增加使角加速度的峰值增大并引起了高频振动,同时使最大齿面接触应力增大,进而加速电动机构齿轮副的疲劳破坏。在齿轮设计时,可以通过适当的热处理增加齿轮材料表面硬度,提高齿轮的抗接触疲劳性能。对于故障的电动机构,齿轮模数为0.25,属于小模数齿轮,齿厚较小,在热处理时需考虑轮齿的脆断适当降低表面硬度,在这种情况下尤其需要严格控制齿轮的中心距,在设计时保证较高的中心距精度,控制中心距增加对齿轮传动造成的影响。
6 试验验证
为了验证传动中心距对电动机构齿轮副传动的影响,开展了物理样机的最大负载寿命试验验证工作。试验样机使用与故障件相同熔炼号、热处理批次,化学成分、力学性能记录完整并均符合要求的主、从动齿轮零件,在标准中心距条件下进行试验,试验按照最大负载工况进行,为了模拟实际工作环境,将电动机构全部寿命工作次数分解为高温工作寿命、低温工作寿命、常温工作寿命和电应力拉偏工作寿命,电动机构在全部寿命工作次数试验中功能正常,试验结束后,对主动齿轮进行分解检查,如图13所示,齿轮工作表面光亮,齿形完整,未出现异常磨损。电动机构的工作电流、运动速度与试验前的数据比较变化幅度在10%以内,齿轮副传动功能正常,性能满足要求。
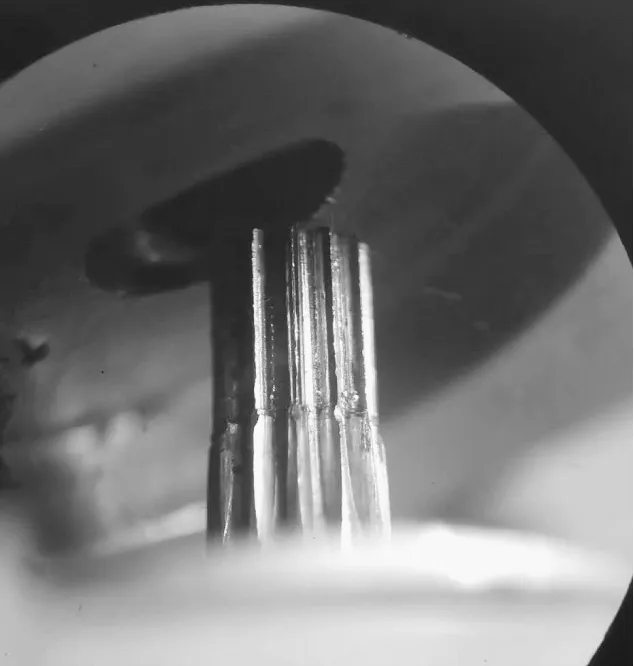
图13 齿轮副分解检查
7 结论
通过对电动机构齿轮副进行有限元静态接触分析与动力学仿真对齿轮副的传动过程以及中心距超差影响进行了具体研究,主要的结论如下:
1)通过电动机构齿轮副静态接触分析,获得啮合过程中轮齿的应力应变以及齿面接触应力,得到啮合过程中齿面接触应力最大位置、齿面接触力的分布情况以及齿面接触应力与等效应力的关系。整个啮合过程中接触力呈周期性波动,一个轮齿啮合周期内转角为30°,最大齿面接触应力263.94MPa,发生在单齿接触时,在多齿接触时最大接触应力会出现明显下降。传动过程中接触线附近位置的等效应力大于远离接触线位置的等效应力。在啮合过程中齿根产生的弯曲应力小于齿面产生的接触应力,与理论计算结果一致,符合齿轮副失效的实际情况。
2)基于Adams 动力学仿真获得齿轮传动过程中的输出转速,角加速度以及接触力的变化情况,仿真结果和理论计算值基本吻合,仿真模型满足要求。
3)在中心距超差的情况下对齿轮副的传动进行了分析与仿真。中心距的超差使输出转速的波动明显增大,使角加速度的峰值增大并引起了高频振动,同时使最大齿面接触应力增大,进而加速电动机构齿轮副的疲劳破坏。对于小模数的齿轮传动,齿面硬度守齿厚影响通常较低,应提高中心距设计精度,控制中心距增加对齿轮传动造成的影响。