极涡风场中平流层浮空器轨迹仿真研究
2021-11-17邓小龙杨希祥侯中喜
龙 远,邓小龙,杨希祥,侯中喜
(国防科技大学空天科学学院,湖南 长沙 410073)
1 引言
由于其独特的地缘战略价值和丰富的战略资源储备,极地地区是当前世界各国争相开发和利用的前沿热点[1]。现有的极地勘探手段众多,主要包括极地科考船平台、卫星遥感平台、极地科考站、无人机平台和浮标平台等。但是,它们均存在不同程度上的局限性,如船舶破冰能力有限,受冰面和天气限制严重;卫星过顶时间短,资源昂贵;科考站受天气限制,需人员长期驻留,且覆盖范围有限;飞机续航能力不足,不能持久驻空等。为了巩固在极地地区的利益,世界各国均在大力发展新型极地探测与保障手段。平流层浮空器作为承载平台具备长航时大范围信息获取的能力,在极地地区的持久大范围信息保障方面具有巨大潜力[2-4]。
研究表明,极涡是一种存在于极地地区中上层对流层和平流层大气的持续性大尺度气旋性环流[5],利用极涡这种持续性、稳定性、气旋性的特点,平流层浮空器可以实现大尺度绕极飞行。与此同时,极地存在显著的极昼现象[6],这对于利用太阳能飞行的平台而言,可大幅降低对储能电池的需求,缩小系统运行规模,提高载荷能力和应用效费比。
对于在极涡风场中工作的平流层浮空器,由于风场紊流对绕极飞行的干扰,其面临的一个重要问题就是在设计约束下的大尺度轨迹保持能力。平流层浮空器在风场环境中的轨迹仿真与控制长期以来受到学者们关注。Kayhan等[7]通过控制气体压缩释放系统进行平流层浮空器的高度调控,分析了平流层浮空器在准零风层的轨迹保持能力。Born等[8]提出一种预测规划算法,使得平流层浮空器在只能垂直机动的情况下,也能保持横向的轨迹。Ramesh等[9]比较了带有控制装置的双气球系统和气球-帆系统在风场中的轨迹保持能力。李魁等[10-11]通过平流层风场预测建模,分析了预测模型对浮空器轨迹控制的影响,研究了平流层浮空器区域驻留策略。这些研究均为极涡环境下的平流层浮空器轨迹控制提供了参考。
本文针对极地这一特定区域,对平流层浮空器在极地风场环境下的飞行轨迹进行仿真分析。同时,针对极昼现象对能源系统的影响,本文分析了在极昼条件下平流层浮空器能源系统的功率变化情况,研究了功率限制条件下水平方向控制策略,为平流层浮空器在极地地区的应用提供支撑。
2 极地风场模型
平流层浮空器的充足可靠的动力是制约其应用的一个瓶颈[4]。考虑到极地地区普遍存在极涡风场的规律性,利用极地环流可以实现浮空器绕极地无动力飞行,降低对平台动力系统的技术需求。下面建立极地风场的模型。
参照国家军用标准GJB 366.2-87[12]在20km处的大气风场数据,选取南纬65度到90度之间的风速进行分析,得到一月份不同经纬度在20km处的风速,由于极地环流的特殊性,在南极圈内同一纬度,不同经度处的风速相差不大,为了便于进行仿真,本文在同一纬度选取了四个不同经度处的风速取平均值,以此作为该纬度的平均风速。见表1。

表1 一月份20km高度处的平均风速
对南纬65度到90度之间的平均风速作插值处理,得到了不同纬度下平均风速的变化情况,如图1所示。由图可知,中国南极中山站(76°22′40″E,69°22′24″S)所在地海拔20km处的平均风速约为28.17m/s。

图1 南纬65度到90度之间一月份海拔20km处的平均风速
虽然极涡风场在极地区域普遍存在,但该风场并不是理想的绕极环流,而是存在不同尺度的风场扰动等现象。例如,NASA在南极开展的高空科学气球试验发现,气球通常在绕南极飞行数圈后回到放飞点附近[13-15],但是由于大气紊流的存在,气球飞行轨迹存在较大不确定性,气球在没有控制装置的情况下,其实际飞行轨迹难以得到保证,存在飞出极地区域的可能。因此,对于绕极持续工作的平流层浮空器而言,必须考虑大气紊流对浮空器飞行轨迹的影响。
本文利用MATLAB产生符合标准正态分布的随机数,用于模拟风场紊流,可以较好地模拟平流层浮空器在大气紊流中受到的侧向干扰力。
3 平流层浮空器动力学模型
平流层浮空器在飞行过程中,水平方向主要受到风场的作用力以及推进系统提供的控制力,而竖直方向上主要受到浮升气体的浮力以及浮空器自身的重力。平流层浮空器气囊形状的确定需要综合考虑空气动力学,结构强度等因素[2],为了便于仿真,本文采用球形气囊进行计算。以中国南极中山站为坐标原点,建立东北天坐标系,可得到动力学方程[10]
(1)
式中:mall为系统总质量;B为浮力;g为当地重力加速度;Fdx、Fdy、Fdz为气动力;Faddx、Faddy、Faddz为附加惯性力;Fcy为螺旋桨动力系统的径向控制力。
(2)
(3)
式中:ρref为当地空气密度;Sx,Sy,Sz为浮空器有效横截面积;vrx=vx-vxwind;vry=vy-vywind;vrz=vz;vxwind与vywind分别为x轴,y轴方向风速;VT为气体总体积;当浮空器形状为球形时,阻力系数Cdx,Cdy,Cdz计算公式如下
(4)
式中:r为浮空器半径,μ∞计算公式如下
(5)
式中:Th为当地大气温度。
浮力大小B与当地空气密度、浮空器内浮升气体体积和当地重力加速度有关:
B=ρrefVTg
(6)
式中:当地重力加速度g计算公式如下
(7)
式中:R为地球半径,g0为地球表面重力加速度。
4 太阳辐照模型与能源模型
能源分系统是浮空器系统持续运行的关键,针对采用的太阳电池与锂离子电池的能源组合,分析太阳电池发电功率的变化情况。太阳电池发电功率与太阳辐射强度有关,因此,首先建立太阳辐照模型:
真太阳时与平太阳时之间的差值为时差,时差的计算公式如下
e=-0.0002786409+0.1227715cos(W+1.498311)
-0.1654575cos(2W-1.261546)
-0.005353830cos(3W-1.1571)
(8)
式中:e表示时差;W=2nπ/365;n为日期序数。
当地真太阳时计算公式为
(9)
式中:tB表示该地区标准时间;L表示当地经度;LB表示当地标准时间位置的经度。
真太阳时用角度来表示为当地太阳时角ω,公式如下
ω=(t-12)×15
(10)
太阳赤纬可由下式确定
(11)
对于太阳高度角h有
sinh=sinφsinδ+cosφcosδcosω
(12)
式中:φ为当地纬度。
设γ为太阳方位角、β为斜面倾角、θ为太阳入射角,则有
(13)
cosθ=sinδ(sinφcosβ-cosφsinβcosγ)
+cosδcosω(cosφcosβ-sinφsinβcosγ)
+cosδsinβsinγsinω
(14)
设I0为大气层外太阳辐射强度,则有
I0=-1353×[1+0.033×cos(2π×n/365)×cosθ]
(15)
大气层内太阳辐射由三部分构成,分别为太阳直射辐射、天空散射辐射和地面反射辐射,由于可供太阳电池发电的辐射主要为太阳直射辐射,下面主要对太阳直射辐射进行建模。
太阳直射辐射强度IDN是指在垂直于太阳光射线的表面上,单位时间内投射到单位面积上的太阳直射辐射能量,且有
IDN=I0τ
(16)
式中:τ为大气透过率,计算公式如下
τ=0.5(e-0.65m+e-0.095m)
(17)
式中:m为大气质量,计算公式如下
(18)
式中:p为浮空器所在高度处的大气压强,p0为海平面大气压强,h为太阳高度角。
太阳电池吸收的太阳直射辐射能量QDN[16]为
(19)
式中:η为太阳辐射吸收率;S为辐射面积。
由于极地存在高纬度地区的极昼现象,与中低纬度地区相比,在极昼期间有持续的太阳辐照,可为太阳电池提供持续的能源。本文比较了南极中山站和长沙市在极昼期间同一天内20km处太阳电池发电量的情况。计算得到,在长沙地区,一天内太阳电池发电总量为7896.5W·h,而南极中山站发电总量为14537W·h,是长沙的1.84倍。考虑通信、测控、球载计算机等功耗,设置总功率需求为400W。太阳电池功率变化曲线如图2所示,在中低纬度地区,太阳电池一天内只能在一定的时间段工作,以长沙为例,太阳电池在上午7点到下午18点这一区间内可以提供400W以上的功率,其它13个小时的时间则需要蓄电池为系统工作提供能源。而在南极地区,由于存在极昼现象,太阳电池在一天内基本能满足400W的功率需求,只在上午1点到5点的4个小时内需要蓄电池辅助其提供能源,对蓄电池的工作时间需求仅为长沙地区的30%。因此对南极地区的平流层浮空器而言,在设计阶段便可降低储能电池的比重,减小系统规模与质量。
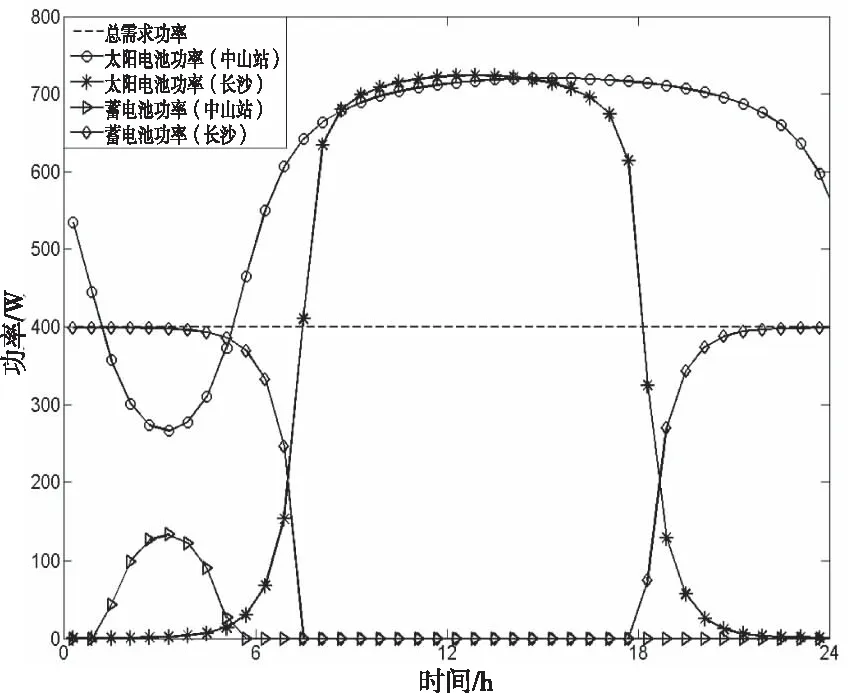
图2 功率随时间的变化情况
5 仿真结果
极地地区由于存在环流,东西方向上风速较大,本文利用极地环流作为浮空器在东西方向上飞行的主要动力。然而,环流并不是规则地存在于东西方向,其在南北方向上也存在分量,极地环流在宏观上表现为不规则的圆或者椭圆,因此,在利用环流飞行的过程中,需要排除环流在南北方向上的分量对平流层浮空器轨迹的影响,通过螺旋桨提供的控制力,将浮空器保持在预定的轨迹上飞行。环流在东西方向上的分量是浮空器的主要动力来源,因此在东西方向上不对浮空器施加控制力,只在南北方向上施加控制力。根据实际轨迹与预定轨迹的偏差量,采用PID控制使得浮空器回到预定轨迹。其中,螺旋桨控制力的表达式为
(20)
在simulink上建立如图3的浮空器仿真模型。
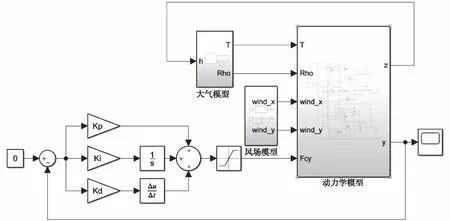
图3 极地平流层浮空器系统simulink模型
5.1 小时空尺度下的无控飞行
仿真过程假定在南北方向上受到一股持续100秒的大小为10m/s的干扰风作用,整个仿真过程持续1000秒,当平流层浮空器没有轨迹控制时,其轨迹仿真图如图4所示,在东西方向上,由于仿真过程设置的风速不变,因此,纬向位移与时间呈线性关系;在南北方向上,受到短暂的干扰风作用,经向位移先是随时间快速增大,当干扰风消失之后,由于阻力的作用,经向速度逐渐减小,最终达到一个平衡状态。
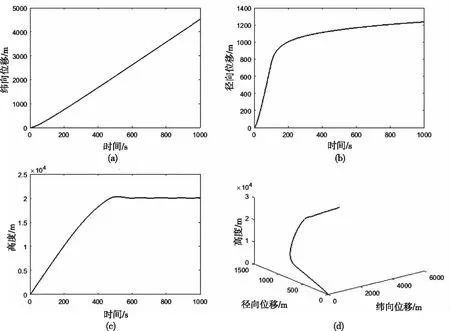
图4 无控制的浮空器纬向位移随时间的变化情况
由仿真结果可以看出,不施加控制的时候,平流层浮空器受到侧向干扰风力作用,会产生不可逆的偏移。
5.2 小时空尺度下的有控飞行
平流层浮空器在南北方向上受到持续100秒的大小为10m/s的干扰风作用,仿真过程持续1000秒,当浮空器在南北方向上有螺旋桨提供的控制力时,其轨迹仿真图如图5所示,在东西方向上,由于风速不变,平流层浮空器纬向位移与无控制的浮空器一样,都是与时间呈线性关系的;在南北方向上,受到短暂的干扰风作用后,经向位移先是随时间快速增大,但同时,螺旋桨的控制力也开始产生作用,当干扰风消失之后,在螺旋桨控制力的作用下,平流层浮空器能够在一定时间内回到预定轨迹上。
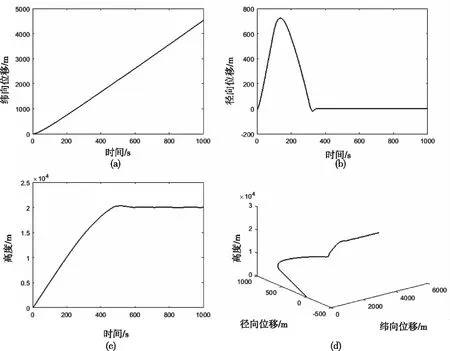
图5 有控制的浮空器纬向位移随时间的变化情况
由仿真结果可以看出,在平流层浮空器上升的过程中,平台受到侧向的干扰风作用而偏离预定轨迹,但与此同时,螺旋桨开始工作,为平台提供控制力,使其不断往预定的轨迹靠拢,虽然作用时间较长,但还是能够达到控制的效果。
5.3 大时空尺度下的有控飞行
参照NASA的ULDB项目[13],绕南极一周大约需要6天时间,飞行距离超过9600千米,下面对带有螺旋桨控制的浮空器在长航时飞行中的轨迹进行仿真,以中国南极中山站(76°22′40″E,69°22′24″S)为起始点,仿真时间为6天,飞行距离超过14000千米,图6为浮空器绕极地飞行的轨迹仿真图。
图6中虚线为平流层浮空器在无控随风情况下飘飞的轨迹,实线为平流层浮空器在控制策略实施下的飞行轨迹。可以看出,在无控情况下,由于受到侧向大气紊流的影响,浮空器逐渐脱离预定的轨迹飞行,无法执行设计的任务。而在本文提出的控制策略下,平流层浮空器通过螺旋桨提供的控制力,可在偏离后再次回到预定的轨迹并保持轨迹不变。

图6 平流层浮空器仿真飞行轨迹
6 结语
本文结合极地地区的风场特性,对平流层浮空器绕极地飞行的轨迹控制策略进行了数值仿真分析,主要结论如下:
1)平流层浮空器利用极地环流的持续性、大尺度、气旋性的特点能够以较少的能源消耗实现绕极持久飞行;
2)相对于中纬度地区,极地地区工作的平流层浮空器可大幅降低能源需求,特别是降低对储能的需求。在同一天同一高度南极中山站太阳电池发电量是长沙的1.84倍,对蓄电池的工作时间需求仅为长沙地区的30%;
3)对于在紊流环境下的平流层浮空器,相对于无控飘飞的航迹无法保持,通过PID控制策略能够实现浮空器绕极轨迹的保持。