数据空泡修正的LTE-5G传感网节点定位算法
2021-11-17赵丽芬陈华君
赵丽芬,田 波*,陈华君
(1.铜仁学院大数据学院,贵州 铜仁 554300;2.广东工业大学自动化学院,广东 广州 510006)
1 引言
无线传感网(Wireless Sensor Network,WSN)技术作为下一代物联网技术的核心,在国民经济绿色转型中起到了非常关键的作用[1]。此外,无线传感网与当今最新的电子及通讯技术不断交融,特别是LTE-5G等通信技术极大的改变了无线传感网的面貌,使得无线传感网通信节点逐步向高流动性的5G制式节点转变[2]。
然而,LTE-5G通信技术所固有的流动性较高,使得无线传感网管理及运行过程中也存在相当的难度,集中表现为信号捕捉难度大,定位精度不高等问题,因此,解决LTE-5G条件下无线传感网节点精确定位的不足,成为当前无线传感网研究领域的热点方向。Gaurav[3]等提出了一种基于无源被动接收评估机制的5G传感网移动节点定位算法,通过极坐标方式捕捉传感节点移动频偏,能够按照方位角-时间差两个维度精确获取传感节点的坐标,精度优势较好,实现极其便捷。不过,该算法也存在一定的弊端,主要是在节点定位过程中,其只能通过被动接收信号的方式来解析节点的方位角及频偏,对信道的稳定性要求较高,抗噪性能较差,难以适应强干扰的部署环境。Mohammed[4]等提出了一种基于双曲线-锚节点定位机制的LTE-5G传感网移动节点定位算法,通过在定位区域内预设3个超级锚节点,并采用双曲线交错定位的方式,有效提高了定位的精度,与文献[3]相比,其定位精度可精确到cm级别,特别适用于节点移动速度很强时的定位场景。不过,该算法与文献[3]相比,待定位节点坐标亦需要通过捕捉方位角-时间差等参数并带入双曲模型中进行运算,在稳定性较差的信道条件下,该技术同样存在精度较差的问题。Devesh[5]等鉴于文献[3]和文献[4]采用被动方式接受信号定位节点的不足,提出了一种基于锚节点主动扫描机制的LTE-5G传感网移动节点定位算法,通过平均撒布锚节点方式预估移动节点运动轨迹,可实现对移动节点拓扑轨迹的实时捕捉,能够较好的满足5G传感网领域中对节点的动态定位需求。不过,该算法的布撒LTE-5G传感节点密度较高,容易因频率相似而产生干涉效应,定位效率较低。
通过对上述LTE-5G传感网节点定位方案进行分析可知,已有的相关方法存在定位精度较低、误差较高的问题。为此,本文提出了基于拉普拉斯预估与数据空泡修正的LTE-5G传感网移动节点定位算法。该算法的主要创新与优势在于:①鉴于采用被动获方式来取信号强度并进行定位所导致的跳数预估失效现象,本文设计了拉普拉斯模拟预估方法,实时估计待定位节点与锚节点间的距离,完成对待定位节点与锚节点间跳数的初步预估;②考虑到节点密度不均衡所产生的定位误差,本文构建了数据空泡修正机制来规避数据传输盲区,优化节点的均衡跳数,并借助三角定位来强化网络拓扑结构感知能力,改善锚节点与待定位节点的定位精度。最后,通过仿真证明了所提算法的有效性。
2 节点模型及定位模型
2.1 节点模型
典型的LTE-5G无线传感网节点模型见图1:矩形区域内分布若干坐标已知的锚节点,可通过随机分布模型自动布撒;若干处于移动状态的待定位节点坐标不确定,需要通过一定方式获取[6]。

图1 典型的节点分布
一般而言,LTE-5G制式的传感节点的发射信号均为高频信号,数据传输及定位过程中需要考虑到高频信号具有的频偏特性:信号调制频率与实际接受到的频率可能存在一定的偏差。此外,由于LTE-5G信号在发射过程中具有分割发射的特性,不同时刻调制的信号相位可能存在互相干涉现象,导致定位过程中极易受到莱斯噪声的干扰,故本文算法的LTE-5G节点的发射信号采用正交16PSK调制模式。在所提的节点模型中,所采用的星座共分四层,每层容纳4个正交信号矢量[7],该模式具有较好的信道抗噪性能,正交64PSK信号投影矢量图见图2,其相位投影见图3。

图2 信号投影矢量 图3 相位投影
2.2 定位模型
由文献[3]和文献[4]可知,采用被动方式进行直接定位的技术解决方案具有简便的优势,但也存在严重的定位误差,这主要是由于信道噪声带来的干扰所致。此外,采用被动方式虽然能够较好的捕捉节点坐标,然而,该方式仅能捕捉具体时刻的节点坐标,难以实现动态捕捉节点拓扑运动轨迹。鉴于该不足,本文采用预估评测模式,如图4所示,通过锚节点与待定位节点存在数据交互的拓扑关系,实现对节点坐标的精确获取。定位过程中,考虑到LTE-5G制式节点信号具有的分割发射特性,锚节点将通过发射数据报文与待定位节点进行交互,防止因节点失效所导致的传输盲区现象。
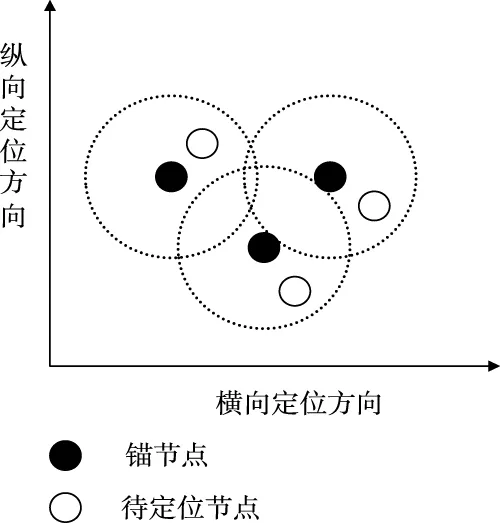
图4 节点定位模型
定位过程如下:
Step 1:锚节点构建定位数据报文,并以广播方式进行全网传输,数据报文格式如下
{Local(i),Node(i),(xi,yi)}
(1)
模型(1)中,Local(i)表示第i个锚节点的初始跳数,当仅当待定位节点进入其一跳区域内时,将该跳数置1,若待定位节点离开其一跳区域时,再将该跳数置0;Node(i)表示第i个锚节点在网络中的唯一识别号;(xi,yi)表示第i个锚节点详细坐标。
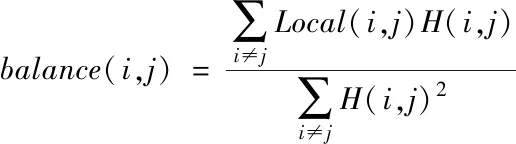
Step 2:获取锚节点的均衡跳数balance(i,j)。采用模型(1)的方式获取第i个锚节点到其余节点的跳数,且获取各个锚节点的坐标后,根据式(2)计算均衡跳数balance(i,j)

(2)
其中Num表示网络中锚节点总数。
Step 3:待测节点进入网络后,通过模型(1)获取各锚节点坐标,并使用三角法进行定位。
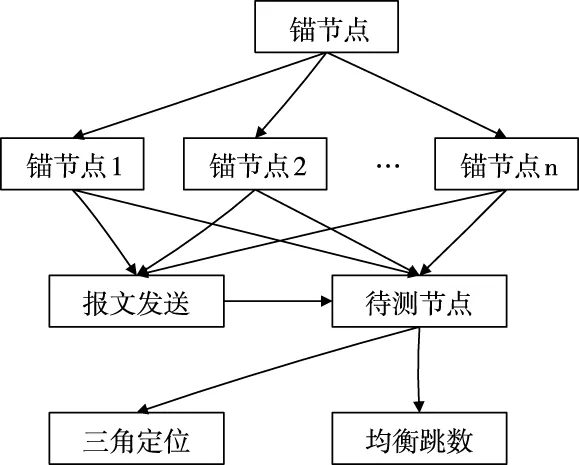
图5 节点定位过程
3 本文LTE-5G传感网移动节点定位算法
在LTE-5G条件下,单纯通过模型(1)-(2)进行定位存在一定的问题:节点接收到的数据报文中的距离值可能具有一定的波动性,每次可能均不一样,这是由于LTE-5G信号特有的频率偏移因素,使得定位过程中接收到的数据具有一定的误差;此外,模型(2)仅考虑了节点分布均衡的状况,因此,跳数均衡过程中可以直接将节点个数作为分母,这是由于锚节点在均衡分布状态下均处于彼此的一跳区域内;实际应用过程中由于锚节点可能分布并不均匀,因此模型(2)所示的跳数均衡将存在较大的误差。
对此,本文算法主要由3个部分构成:①基于拉普拉斯模拟预估方法的跳数均衡,该方法考虑到接收到的数据所具有的统计特性,采用拉普拉斯预估方式对不同锚节点间的跳数进行计算,可以精确获取不同锚节点间的均衡跳数。②数据空泡修正机制,针对锚节点间跳数可能存在的统计抖动现象,通过发射数据空泡并计算拓扑跳数的方式对以获取的均衡跳数进行再修正,降低因信道噪声干扰而导致的统计误差。③三角定位法,拟通过三个锚节点定位的方式实现对待定位节点坐标的精确获取,进一步提高本文算法的精度。
3.1 均衡跳数的预估
第i个锚节点可以通过监听网络中数据报文的方式来获取各个锚节点的详细拓扑信息,设该节点通过计算获取的与第j个锚节点间的实测值Local(i,j)满足如下的高斯分布:
N(H(i,j)balance(i,j),σ2)
(3)
实测值Local(i,j)的概率密度函数满足

(4)
其中,N(H(i,j)表示间第i个锚节点和第j个锚节点的跳数,其余参数及获取方法同模型(2)。
由模型(3)可知,距离测量值为统计样本,Local(i,j)单次测量方式如下:

(5)
联合式(3)和式(5),由节2.1可知,信号发射过程均有一定的随机性,特别是LTE-5G信号存在的莱斯信道噪声干扰,因此可根据莱斯噪声的特点来构建拉普拉斯预估函数
G(balance(i,j))=

(6)
随后,对式(6)进行对数处理[9],可得
lnG(balance(i,j))=

(7)
对式(7)求H(i,j)的一阶微分,可得
(8)
网络中任意两点间经过修正后的均衡距离可由模型(8)获取。若网络中锚节点总数为m,则网络的平均一跳均衡距离Netone为
(9)
任意待定位节点与锚节点的距离若小于式(9)的Netone,则可以认为该节点处于该锚节点的捕获范围,可以使用三角法进行定位。
3.2 待定位节点的均衡跳数修正
由节3.1可知,预测过程中的测量误差与节点间跳数的预测密切相关,由于LTE-5G节点具有的高流动性,使得网络拓扑处于不稳定状态,容易因节点失效而导致连通故障,因此需要通过一定的方法改善跳数预估的误差[10],从而达到修正定位坐标误差的目的。为解决该问题,本文构建了数据空泡修正机制。数据空泡修正机制的详细过程如下:
Step 1:锚节点在式(1)的基础上,向分组报文的头部添加0字节报文,并定时将该数据报文进行广播
{0,Local(i),Node(i),(xi,yi)}
(10)
任意锚节点在接收到式(10)所示的数据报文时,均将该数据报文中的节点信息替换成自身信息后,继续进行广播发送。
Step 2:当第i个锚节点需要计算其与锚节点j之间的跳数时,监听与待测锚节点间的数据报文,计算传输时耗Time(i,j),而单径时间Timeone(i,j)为传输历时的一半,其计算函数为:
Timeone(i,j)=0.5Time(i,j)
(11)
根据式(8)求取第i个锚节点与锚节点j之间均衡跳数balance(i,j)后,联合式(11),可计算两者间的单跳时间one_Time(i,j)

(12)
Step 3:任意锚节点在完成对网络中全部锚节点位置信息的获取后[11],按如下方式修正网络平均单跳时间one_time_Net(i,j)

(13)
Step 4:待定位节点j按照式(10)发送数据报文后,锚节点i将该该节点的均衡跳数balance(i,j)及单跳时间one_Time(i,j)加入数据报文并进行广播
{0,Local(i),Node(i),(xi,yi),balance(i,j),one_Time(i,j)}
(14)
Step 5:获取待定位节点j与锚节点i之间的数据传输时间Tra_time(i,j),则测量单径时间Tra_onetime(i,j)可按如下方式获取
Tra_onetime(i,j)=0.5Tra_time(i,j)
(15)
Step 6:结合式(13)和式(15)可获取待定位节点j与锚节点i之间跳数hop(i.j)

(16)
Step 7:结合式(9)和式(16),可得最终修正后的待定位节点j与锚节点i之间的距离Tra_local(i,j)
Tra_local(i,j)=hop(i,j)×Netone
(17)
图6显示了数据空泡修正机制与文献[8]、文献[9]的距离测量相对误差,显然本文所构建的数据空泡修正机制距离测量相对误差一直处于较低的水平,且波动幅度要小于文献[8]、文献[9]。

图6 距离测量相对误差
3.3 节点坐标的精确定位
通过超空泡修正机制,能够迅速获取任意一个节点与周围锚节点间的距离,且精度误差能够控制在3.2%以内,见图6。设待定位节点(x,y)位置距离最近三个锚节点坐标为(x1,y1)、(x2,y2)、(x3,y3),待测定位与三个锚节点间距离估测值d1、d2、d3可通过模型(17)获取:
d1=hop(x,x1)×Netone
(18)
d2=hop(x,x2)×Netone
(19)
d3=hop(x,x3)×Netone
(20)
联立模型(18)-(20)可解得待定位节点坐标(x,y)
(x,y)T=AB
(21)

(22)

(23)
通过式(21)~(23)即可精确获取待定位节点的坐标[12],见图7。

图7 三角定位
4 仿真研究
本文仿真采用NS2工具和Linux Centos 6.7 操作系统进行测试[13],节点分布在矩形区域内,该区域的大小为2000m×2000m;节点均采用速度可控模式,锚节点位置固定,待定位节点速度可设定为固定模式和随机模式2种[14];此外,待定位节点移动路径可以预先设置,其它参数见表1。对照组算法选取当前常用的被动扫描定位算法[15](Passive Scanning Location Algorithms,PSL算法)、二向度定位算法[16](Bidirectional Localization Algorithm,BL算法)。
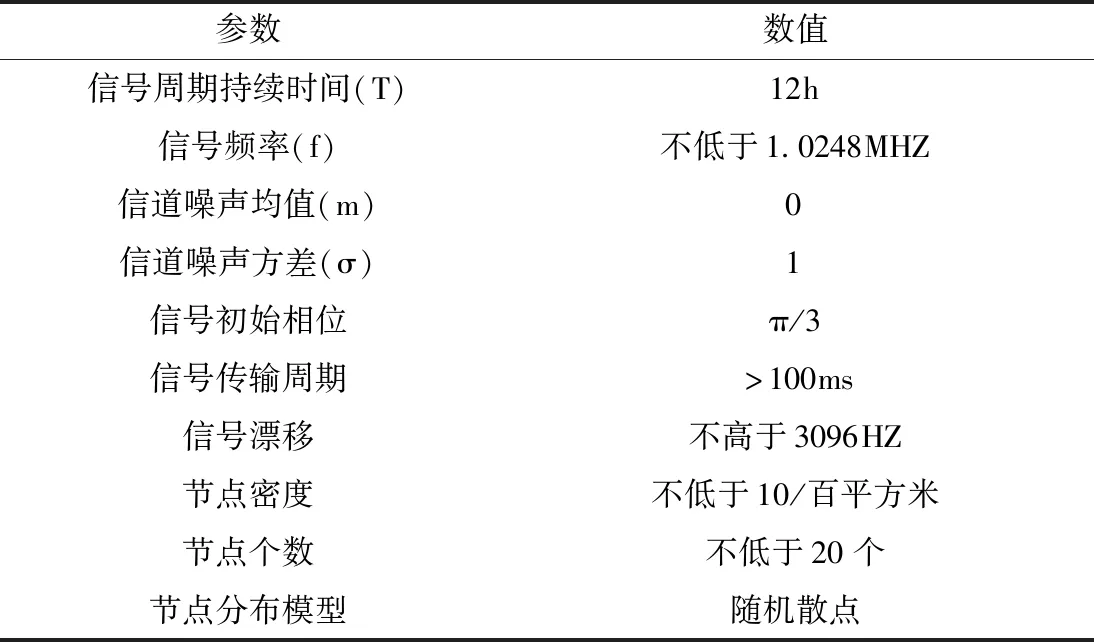
表1 仿真参数表
4.1 定位精度
锚节点为移动状态,沿着区域边沿保持匀速移动状态;待定位节点的个数为20个,运动速度分别为10m/s和20m/s,逐个节点计算坐标位置,见图8(a)和8(b)。由图可知,本文算法的待定位节点定位精度很高,特别是在节点运动速度较快(20m/s)时,PSL算法及BL算法与本文算法的差距更为明显。这是由于本文算法充分考虑到定位过程中存在的距离测量精度较低及跳数估测误差较大的实际,构建了拉普拉斯预估方法和数据空泡修正机制,提高了距离测量的精度并降低跳数估测误差,特别是在因高速流动状态时信道处于不稳定状态,能够通过三角定位机制降低信道中莱斯噪声的影响,因此定位精度较高。此外,由于本文采用了拉普拉斯预估方法,与实际环境中莱斯噪声主要以拉普拉斯随机变换的规律相互符合,具有较高的拟合度,从图中可知,本文算法在横向分布坐标1400-1600米出现最大误差,误差度在10m左右,与锚节点的整体吻合度为85.7%,而PSL算法在横向第200米处出现最大误差,误差度达219米,与锚节点的整体吻合度为55.9%,BL算法在横向第600米处出现最大误差,误差度达177m,与锚节点的整体吻合度为61.4%,因此算法采用的拉普拉斯预估方法可较大幅度降低莱斯噪声,提高定位精度。PSL算法采用锚节点扫描机制,当仅当节点运动至锚节点覆盖范围时方可发挥定位效果,且未考虑到节点与锚节点之间的跳数误差影响,因此定位精度要低于本文算法。BL算法虽然能够根据节点信号发射角度与频率进行估测,然而该算法并未考虑到信道噪声对节点信号频率的干扰因素,导致距离测量及跳数估测过程中的抗噪性能较差,因此难以适应节点高速流动的实际部署环境,定位精度亦要低于本文算法。

图8 不同算法的定位精度测试
4.2 定位误差
节点布撒及初始参数设置同节4.1;分别在低干扰信道和高干扰信道两种条件下进行定位误差仿真。显然,本文算法定位误差始终较低,PSL算法和BL算法不仅定位误差要始终高于本文算法,且波动幅度也要高于本文算法。特别是在高干扰信道条件下,本文算法的定位误差最高仅为0.72m,PSL算法的定位误差最高达1.57m,BL算法的定位误差亦达0.96m之多。这说明了本文算法构建的拉普拉斯预估方法和数据空泡修正机制确实能够大幅度提高定位精度,降低定位误差,性能要显著好于PSL算法采用锚节点扫描机制及BL算法采用的节点信号发射角度与频率联合估测机制,优势明显。
5 结束语
针对当前LTE-5G传感网移动节点定位方法中存在的定位精度和抗干扰能力较低的问题,提出了一种基于拉普拉斯预估与数据空泡修正机制的LTE-5G传感网移动节点定位算法。通过构建拉普拉斯预估方法来计算待定位节点与锚节点间均衡跳数,降低信道噪声对定位过程的干扰。另外,本文算法还设计了数据空泡修正机制,以精确判断网络拓扑连通性能,提高节点处于高速运动状态下的定位收敛度性能,从而修正节点坐标的定位误差。再借助三角定位方法,精确获取待定位节点坐标。仿真数据显示,相对于PSL算法和BL算法而言,在不同的节点运动速度下,所提算法的定位精度在整体上分别提高了30.6%、21.3%,而在干扰信道条件,所提算法的定位误差在整体上分别降低了54.2%、25%。

图9 不同算法的定位误差测试结果
下一步,将针对本文算法对立体空间中传感节点定位中适应性不足的问题,拟引入超欧里几何拓扑坐标优化判断机制,提高本文算法在多维拓扑条件下的判断与定位能力,促进算法在实际场合中的推广运用。