针对大滞后系统的改进内模控制算法研究
2021-11-17王文标刘青震汪思源任冠企
王文标,刘青震,汪思源,任冠企
(大连海事大学,辽宁大连 116033)
1 引言
大滞后对象广泛存在于化工、石油、冶金、制药和造纸等工业生产过程中[1-2]。由于时滞的存在,导致当前施加到系统的控制量要经过一段时间的延时才能反映到系统的输出端,而且当系统受到干扰而引起被调量改变时,由于大滞后的存在,控制器不能立刻对产生的干扰起到抑制作用[2]。一般用被控对象的滞后时间常数τ与系统的惯性时间常数T的比值,即τ/T来衡量滞后对系统的影响。当τ/T<0.5时,认为小滞后系统,当τ/T≥0.5时,认为大滞后系统[3]。因此随着τ/T的比值逐渐增大,系统的控制难度也逐渐增加,尤其是对于大滞后系统的控制。因此,大滞后系统被认为是一类较难控制的系统[4]。
针对大滞后系统的控制,传统的控制方法如Smith预估控制[5],Dahlin算法[6]等,从理论上解决了大滞后系统的控制问题[7],但该方法在实际的应用当中存在一定的局限性,即该控制方法严重依赖于被控对象模型的精准性,当建模存在误差或者受到干扰发生模型摄动的时候,就可能会对系统的控制产生严重的影响,甚至会导致系统不稳定。近年来,随着模糊控制,神经网络控制,分数阶控制等研究的深入,有些学者将这些高级算法与Smith预估控制等方法相结合,提出了一些针对大滞后系统的改进控制方法[8-9]。虽然这些控制方法取得了不错的控制效果,但是系统的复杂程度和调试难度也随之增大。针对以上的不足,本文提出了一种改进的内模控制方法。该方法设计简单,调试方便,经仿真验证结果表明,能够对大滞后系统起到良好的控制效果,较传统控制方法缩短了调节时间,同时也增强了系统的鲁棒性和抗干扰特性。
2 改进内模控制器的设计
2.1 系统结构设计
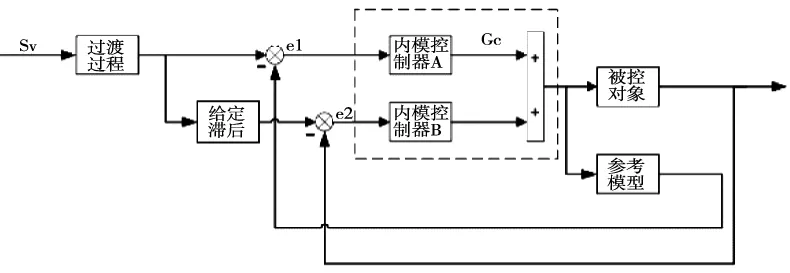
图1 改进内模控制结构图
2.2 改进内模结构控制原理
如图1所示,当系统被施加阶跃信号时,阶跃信号首先经过过渡过程被分为两部分,一部分与参考模型的输出求偏差为e1,另一部分作用于给定滞后后与被控对象的输出求偏差为e2,由于实际被控对象为大滞后系统,因此可知偏差e1先于偏差e2输出,所以控制器先根据偏差e1对参考模型进行控制,使得参考模型先于实际被控对象达到稳态,同时为实际被控对象快速找到一个大约的控制量,当偏差e2产生后,控制器再根据偏差e2的大小进行控制量的微调,使得控制量达到实际被控对象所需的精确值。该结构的改进,即保证了对于大滞后系统的响应速度,同时还大大缩短了大滞后系统的调节时间,因此该结构从根本上消除了大时滞对系统控制的影响,提高了控制精度和控制品质。
当系统受到扰动时,以反向扰动为例,偏差e1不变,偏差e2变为正值,因此偏差e2经过内模控制器B输出一个正值得控制量,导致总控制量增加,总控制量然后作用于参考模型,使得其输出增大,因此导致偏差e1变为负值,经过两个控制器的求和就可以消除了扰动对系统得影响。
2.3 内模控制器的设计
2.3.1 内模原理

图2 内模结构控制图
图2中Q(s)为内模控制器,P(s)为被控对象,M(s)为过程模型,Gf为反馈滤波器,D(s)为扰动[10]。Gf=1的IMC系统称为 1 自由度 IMC,否则称为 2 自由度IMC,本次选用的为 1 自由度 IMC[10]。由上图可得,传递函数为

(1)
将Gf(s)=1代入上式得:

(2)
因此图2就转化为图3形式。

图3 内模结构控制图
将图3的内模控制结构转换为单位负反馈结构传统的做法是将过程模型经过结构图化简并联到控制器Q(s)上,然后在通过等效变换将其转换为一个结构,如图4所示。

图4 等效内模控制图
步骤 1:首先将系统模型Gm系统模型分解成两项:Gm+和Gm-,此处,Gm+是一个全通滤波器传递函数,对于所有频率Ω,满足 |G+(jΩ)|=1[11]。即Gm+包含了Gm的所有时滞和右半平面零点的非最小相位环节[11]。Gm-包含了Gm的最小相位环节[2]。
步骤 2:设计内模控制器时,需要在最小相位的Gm-增加滤波器,以确保系统的稳定性和鲁棒性。因此这里定义IMC的控制器为

(3)
式(3)中f为低通滤波器,这里选择f的目的之一是为了使Q(s)有理,式(4)为f的通用结构。其中λ为滤波器的参数,是内模控制器仅有的设计参数[11]。因此可以通过改变λ值来调整系统的跟踪性能与鲁棒型

(4)
因此由式可以得出单位负反馈的控制器

(5)
2.3.2 改进内模控制器的设计
3 仿真实例验证
本文选取的被控对象传递函数为
由上面的被控对象可知,惯性环节T=0.1,滞后时间L=30,L/T=300远远大于大滞后系统规定的0.5,因此该被控对象为一个典型的大滞后系统。选择传统的PID结合Smith预估控制和传统内模控制结合Smith预估控制作为对比[11],对3种方法的控制效果进行对比分析。
根据所提出的改进内模控制的方案,在Matlab/Simulink中搭建如图5所示的控制系统仿真模型。

图5 Matlab/Simulink仿真模型
3.1 系统的单位阶跃响应
选择系统的输入信号为阶跃信号,信号幅值为10个单位。系统的阶跃响应如图6所示。在这里,三种控制器的参数选择如下:
根据文献[8],这里的PID结合Smith预估控制参数为Kp=2.5,Ki=1。
传统内模控制器的滤波系数为:f=0.5。
改进内模结构的参数为:内模控制器A的滤波系数λ1=0.3,λ2=4000。
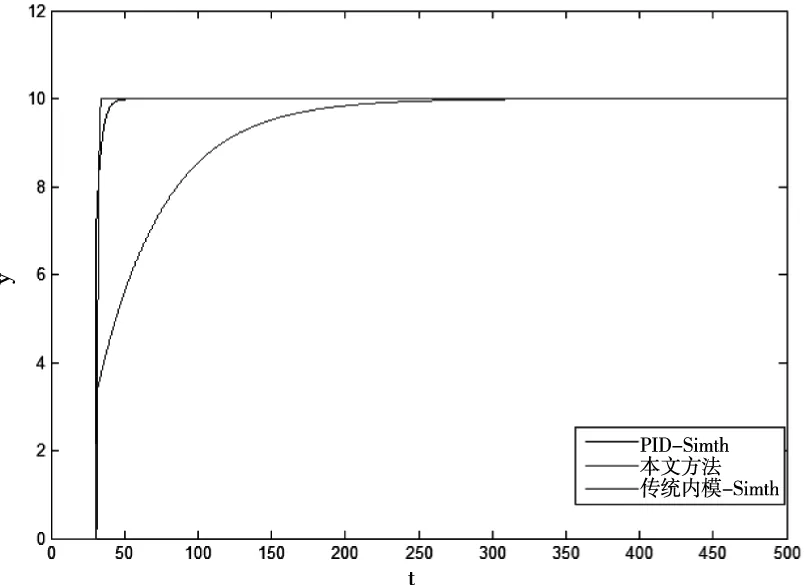
图6 系统阶跃响应
三者的性能指标如表1所示。

表1 三者的性能指标
由表1的性能指标可知,在被控对象模型精准的情况下,改进内模控制的调节时间最短,综合性能指标ITAE最小。
3.2 被控对象发生变化时系统的阶跃响应
研究当被控对象模型发生变化时三种控制算法的控制效果。保持3种控制器的参数不变,将被控对象的惯性环节T增大10倍,系统的阶跃响应控制效果图如图7所示。与图6相比,PID结合Smith预估控制已经产生了严重的超调,稳态时间也相应的增大,控制效果明显变差。而改进内模控制与内模-Smith预估控制的控制效果未发生明显的变化。
同样保持3种控制器参数不变的情况下,在被控对象惯性时间常数T增大10倍的基础上,将滞后时间常数L增加20%。系统的阶跃响应如图8所示。
由图7可以看出,PID结合Smith预估控制已经产生了明显的发散振荡,传统内模-Smith控制虽然对被控对象的失配依旧能够可控,但与图5,图6相对比,调节时间增大,控制效果明显变差。但本文改进的内模控制对于被控对象的失配依旧能取得良好的控制效果,体现了本文方法具有较好的鲁棒性[11]。

图7 惯性时间常数T增大10倍的阶跃响应

图8 滞后时间常数L增大20%的阶跃响应
3.3 被控对象扰动下的阶跃响应
针对三种控制器,在控制器参数不变的情况下,分别在250s处施加一个设定值20%的阶跃干扰,控制效果图如9所示。
由图9可以看出,当同时给被控对象施加设定值20%的阶跃扰动时,系统偏离设定值一段时间后又三者都又回到了设定值,但本文方法的回复时间最短,然后是PID结合Smith预估控制和传统内模-Smith。因此当被控对象被施加扰动时,本文方法较前两种方法具有较强的抗干扰能力。
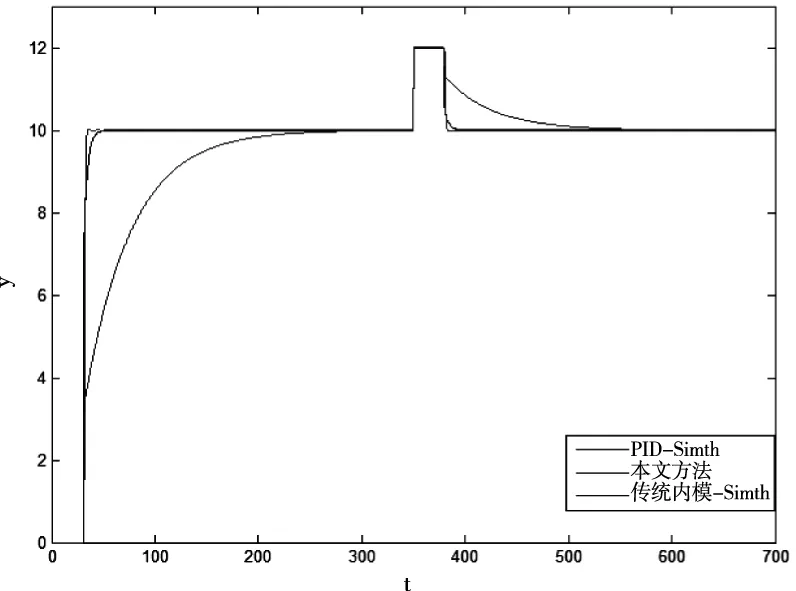
图9 扰动下的阶跃响应
4 结论
本文针对工业上常见的大滞后系统,提出了一种改进的内模控制方法,该方法能够有效地的解决大滞后系统的难控问题,克服了传统控制算法结合Smith预估控制方法严重依赖被控对象精准模型的缺点,并改善了传统内模结合Smith预估控制调节时间长的问题。并通过Matlab仿真证明了本文方法较传统的PID-Smith预估控制,传统内模-Smith控制具有较好的控制效果。同时还研究了模型摄动的情况下以及被控对象施加干扰等情况,证明了本文方法较传统大滞后控制方法具有更好的动态性能,鲁棒性和抗干扰特性。