基于VR的视频图像处理效果优化仿真研究
2021-11-17王婧,高博
王 婧,高 博
(福建农林大学,福建 福州 350000)
1 引言
VR(Virtual Reality,虚拟现实)技术是新一代视频显示技术,将用户放置在球形区域中心,可以自由选择观看周围360度的视频场景,不受空间和时间的限制,具有身临其境的感觉。VR视频是一种新型的视频载体,它具有声音和图像对齐的特点,给用户一种深入式沉浸感。与传统视频图像相比,虚拟现实需要更高的比特率,同时也会占用更多网络带宽和存储空间,在给予用户优质体验的同时,如何优化视频质量和低比特率的视频编码是VR视频快速发展的关键之一,同样这也是本文的重点。
早期的视频图像处理系统主要基于仿真系统[1],技术成熟、成本低廉,但传输距离短、抗干扰能力差,存储不方便,无法进行复杂数字处理。而现阶段,高分辨率数字视频图像处理系统已广泛应用,通常采用数字信号(Digital Signal Process,DSP)作为处理器[2],但DSP较为适用复杂算法内,程序本质是串行执行,难以满足高速信号实时处理的要求,处理速度有限,要求及时性的系统中不适用。相比之下,FPGA(Field Programmable Gate Array,现场可编程门阵列)在实时图像处理占有很大速度优势[3]。根据现场可编程门阵列的内部结构和分布式算法,使各功能块可以同时工作,更有利于高速数字信号处理,但是处理效果依旧不够理想。
因此,本文提出基于VR的视频图像处理效果优化,在中值滤波算法基础上,添加阈值建立极值中值滤波算法,对视频图像中的噪声波点去除,是VR图像更切合现实背景。
2 虚拟现实技术
虚拟现实技术系统由检测模块、反馈模块、传感器模块、控制模块、建模模块和三维模块组成,系统组成如图1所示。
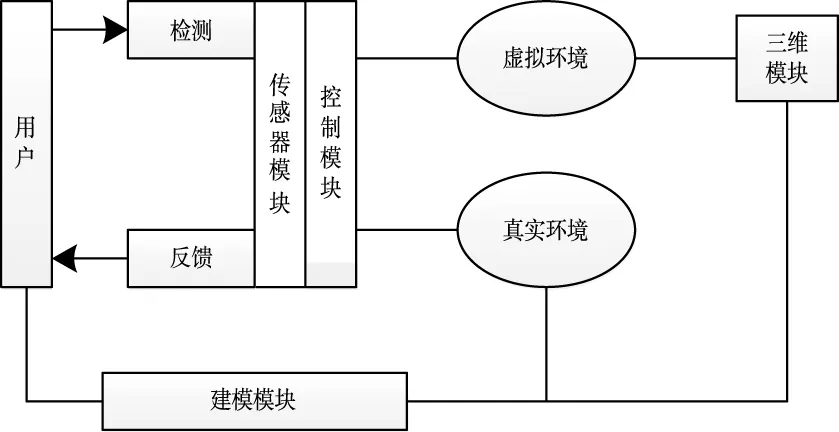
图1 虚拟现实技术的系统构成
在这六个模块中,检测和反馈模块是连接传感器模块以及用户的桥梁,控制模块在传感器模块和三维模块之间起连接作用,而建模模块则是通过用户的操作直接生成三维模块,它们之间的关系是相互联系、相互补充的。其中,图像作为虚拟现实技术中最为关键载体,能够通过视觉影响使用者对环境感知[4],增强视频图像处理效果能够进一步加强虚拟真实感。
3 视频图像数字化
图像是二维数据,数据在内存中只能一维存储,所以在本次设计中,视频图像数字化多采用量化方法。此处做出对应的假设,安排在M×N数据组中,利用等距采样获取出一幅近似连续图像f(x,y),那么即可得出
f(x,y)

(1)
其中每个元素就是一个离散变量,而式(4)的右侧则代表数字视频图像,数据组中每个元素即被描述成为相对应的像素条件。
在实际计算过程中,令Z和R分别表示为实整数集和实数集,采样时将其转换为网络格式作为图像平面,并根据笛卡尔坐标系计算确定每个中心点的网格图像。
如果式中x和y同样也被表示为Z集合中实整数,而且f(·)是给点对(x,y)赋予灰度值的函数,那么f(x,y)就可以代表一幅完整的空间数字化图像,其中赋值过程也可以称之为量化过程。如果计算得知图像中灰度值也取为整数,就是指Z集合代替了R集合,这样f(x,y)就可以直接表述为数字图像,并且该图像是坐标值与灰度值都取整数的二维函数[5]。
图像数字化处理过程中,首先对处理图像大小M、N以及像素的离散灰度计数G进行判定,在计算中经常将这些量都取为2的整数幂,这样图像数字化处理表达式便可写为

(2)
如果把图像离散灰度取值范围定在0和10之间,以均匀状态分布,那么根据下式即可得出储存一张数字视频图像需要的bit
b=M×N×K
(3)
如果M=N,那么就可以得出
b=N2k
(4)
比如M=N=1024、G=256=28=2k,那么就有b=N2K=8Mb。
4 视频图像处理效果优化
4.1 单向多级中值滤波算法分析
中值滤波是将数字图像中某一点值替换为该点邻域内的中值[6],而中值取值结果则根据以下方法计算:
假设定义一组数据x1,x2,x3…,xn,将其按照大小顺序对这n个数值进行排列得出
xi1≤xi2≤xi3≤…≤xin
(5)
其中,当n为奇数时便有

(6)
n为偶数时

(7)
根据上式计算结果即可得知,图像效果将和3×3窗口下的简单邻域平均法得到的结果相似,将y描述为序列x1,x2,x3…,xn的中值[7]。
在计算过程中,假设将x(m,n)描述为有噪声混杂的原始视频图像以及在坐标为(m,n)处像素点灰度值。首先选取出矩形窗口为L=2N+1,其中N代表了非负整数,将这个窗口划分成为等同的四个子窗口,流程如下描述
W1(m,n)={x(m,n+i),-N≤i≤N}
(8)
W2(m,n)={x(m+i,n),-N≤i≤N}
(9)
W3(m,n)={x(m+i,n-i),-N≤i≤N}
(10)
W4(m,n)={x(m+i,n+i),-N≤i≤N}
(11)
根据计算可获得图2MLM滤波器示意图:

图2 MLM 滤波器
W1,W2,W3,W4代表沿着水平或垂直进行旋转的一维图像窗口,然后令Z1(m,n),Z2(m,n),Z3(m,n),Z4(m,n)分别是4个窗口W1,W2,W3,W4的中值,这样便有:
Z1(m,n)=med[x(i,j)∈W1(m,n)]
(12)
Z2(m,n)=med[x(i,j)∈W2(m,n)]
(13)
Z3(m,n)=med[x(i,j)∈W3(m,n)]
(14)
Z4(m,n)=med[x(i,j)∈W4(m,n)]
(15)
将Umax(m,n)和Umin(m,n)描述为四个中值Z1(m,n),Z2(m,n),Z3(m,n),Z4(m,n)的最大值以及最小值,即可得出:
Umax(m,n)
=max[Z1(m,n),Z2(m,n),Z3(m,n),Z4(m,n)]
(16)
Umin(m,n)
=min[Z1(m,n),Z2(m,n),Z3(m,n),Z4(m,n)]
(17)
根据上式,单项多级中值滤波的输出形式就有
y(m,n)=med[Umin(m,n),Umax(m,n),x(m,n)]
(18)
4.2 基于阈值的极值中值滤波算法图像效果优化
本文通过加入阈值构造极值中值滤波算法,增强滤波窗口的图像像素排序[8],通过预判断将图像区域划分为图像边缘细节区域、平坦区域和噪声影响区域,优化过程如下:
首先,对窗口W[xi,j]内的像素点排序,找出max(W[xi,j])点和min(W[xi,j])点,也即极大值与极小值点。然后,将该点xij与max(W[xi,j])点、min(W[xi,j])对比,根据对比结果可知,如果两点不一致,那么就传输原值,不经过滤波处理,反之如果这两点取值相同,那么就采用预判断算法进行处理。
设f(x,y)为图像(x,y)点处的灰度值,g(x,y)为(x,y)邻域内像素点的灰度值。选择一个算子Y作用在g(x,y)和f(x,y)上,得Y=Y(f,g)之后根据不同的Y作进一步处理。这里Y的形式如下式所示

(19)
其中可得出

(20)
经过计算,式中i取值便如图3所示。
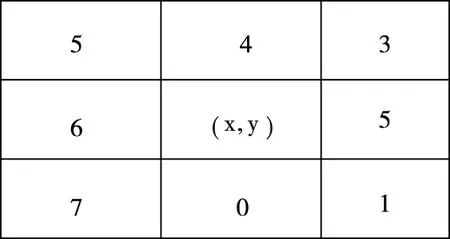
图3 i取值分布
在图3中,将点f(x+1,y)设为点(x,y)邻域内的第0点,依次围绕点(x,y)一周,直到点f(x+1,y-1)为第7点。
根据上述可得知T表述为常数阈值,而图像中噪声污染程度以及图像之间的分布变化、对比度都会直接影响T值的取值结果。面对分布变化大的图像,计算时T值结果就需要高一些,反之如果图像视觉效果良好,并没有很大噪声污染,分布变化也没有被拉的过大,那么计算过程中T值就需要取低值,不然会出现因阈值取值结果不精准,而导致的失误情况。
如果最终选择的阈值结果太高,在处理图像时会误认为噪声是有用的信号点,大部分噪声仍会保留在处理过程中,从而降低滤波处理效果和视觉效果;反之,如果阈值太小,则相应的会出现这种情况,将有用的信号点作为污染噪声处理,使图像更加模糊,信噪比会降低视觉效果。
根据上述计算结果,便可以进一步获取出以下判定:
1)如果任何像素的灰度值等于或接近它,即Y=0时,可将该点作为一个孤立噪声点进行中值滤波。
2)当1到4个像素灰度值等于或非常接近它时,即1≤Y≤4时,该点将被视为一个边缘细节节点,将不经处理而输出。
3)当有超过4个像素的灰度值等于或非常接近它时,即Y≥4时,可以认为该点位于一个平坦区域中,不处理该点。这样,整个计算过程可以表示为:

(21)
5 仿真研究
5.1 评价指标
5.1.1 纹理特征分析
图像灰度共生矩阵是纹理统计分析主要方法之一,利用灰度二阶统计量描述图像中灰度分布。将灰度共生矩阵ρ(d,φ)定义为从灰度为i点离开某个固定位置点上灰度为j的概率。此处选取d=1,而φ的取值分别为0°,45°,90°,135°,这样即可建立对比度以及熵的表达式:

(22)
根据计算得出k=i-j。在视频图像处理优化过程中,对比度是图像纹理沟槽测量的主要因素。凹槽越深,图像之间的对比度就越大。熵是对图像信息的度量。如果图像没有纹理,则熵值几乎为零。如果有许多精细的纹理,那么熵值会更大。
5.1.2 噪声比
视频图像处理后评价的指标是图像中含有噪声对比(Contrast to Noise Ratio,CNR),便有
(23)
式中,μt和μb分别被描述为图像中噪声目标区域以及背景区域的均值,而σt和σb则表述为噪声目标和背景的标准方差取值,根据计算取值如果CNR越高,那么就证明该图像没有达到效果最优。
5.2 实验结果分析
将提出的基于VR的视频图像处理效果优化仿真与基于仿真系统、基于DSP和基于FPGA的视频图像处理方法作比较,以验证提出的基于 VR的视频图像处理效果优化仿真在使用后,对于视频图像处理质量的优化程度。
本文使用的实验材料来自某开源信息库,计算机实验环境如表1所示。
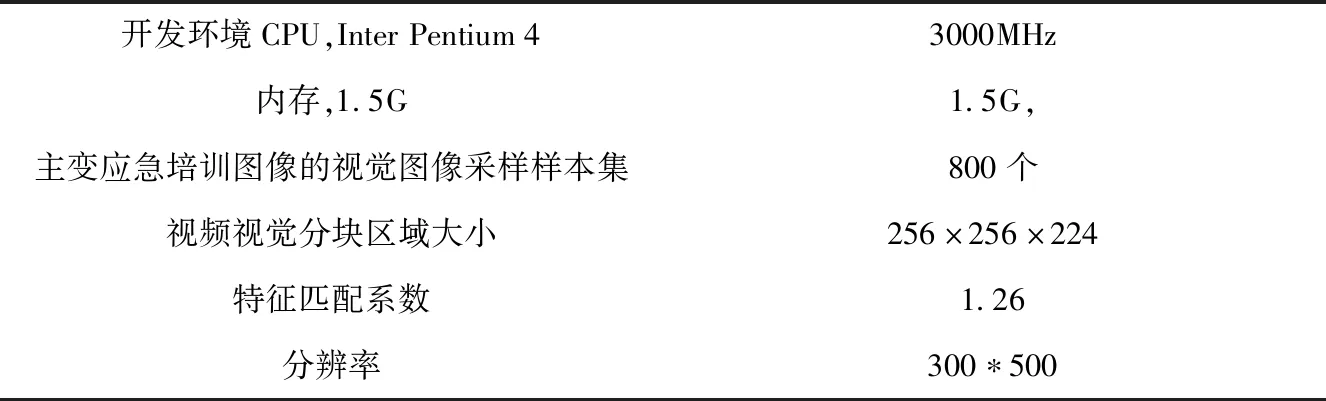
表1 计算机实验环境参数设置
通过基于仿真系统、基于FPGA、基于DSP以及本文方法处理后,仿真结果如图4所示。

图4 图像优化处理对比图
根据图4可知,本文处理效果最优,因为本文算法可以计算得出最适用的阈值,其它算法虽然可以完成优化目的,但由于图像优化标准值难以计算,式中不能达到满意效果。
本文对图像处理时,针对产生视觉效果差、压缩比率低等问题做出了解决,为得出得出视觉效果最优图像,现对比本文方法的优化效果的具体参数,不同方法的对比结果如表2所示。
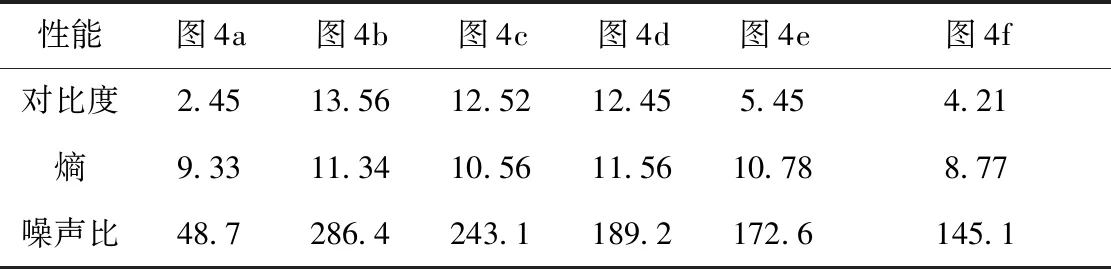
表2 性能对比结果
如表2可知,在更细致的性能对比过程中,本文方法的优化效果明显高于其它方法,其对比度为4.21,噪声比为145.1,皆低于其它方法,说明本文方法可以有效调整对比度参数,防止丢失细节,减少刺眼强度。
当图像中出现较多“毛刺”现象时,其中所存坏像素点较多,图像质量优化就会失效,从而不能准确地得到视频图像效果,因此,对比经过三种方法处理后的“毛刺”现象显现程度,可以反映不同方法的优化效果。对比结果如图5所示。

图5 不同方法的辨识效果对比结果
如图5所示,对视频帧中含有“毛刺”现象的图像像素数据进行含坏像素点处理时,本文方法的含坏像素点显现程度高于其它两种方法,最为接近实际值,最高可达500,说明本文方法对“毛刺”现象辨识效果较强且可适用于多个视频帧应用,实际应用效果得到保证。
6 结论
1)提出基于VR的视频图像效果优化方法,对“毛刺”现象的优化效果其最为接近实际值,最高可达500,更加贴合真实生活环境,解决视觉效果差、压缩比率低等问题。
2)本文方法优化后的对比度为4.21,噪声比为145.1,可以有效防止丢失细节,减少刺眼强度,完成视频图像优化,得出视觉效果最优图像。
3)由于计算过程中滤波阈值需要精准取值,对计算结果有不容更改的硬性要求,不能广泛适用于各类计算机中,如何提高容错率是下一阶段研究的重点课题。