基于选择性交互的群集机器人协同避险方法
2021-11-17张瑾琪闫茂德杨盼盼张博宇
张瑾琪,闫茂德,杨盼盼,张博宇
(长安大学电子与控制工程学院,陕西 西安 710064)
1 引言
群集机器人以其感知分布性广、系统可靠性高、功能分布性强、经济实用性好等特点,受到了研究人员的广泛关注,已成为当前机器人领域的研究热点[1]。随着群集机器人应用场合的不断扩大,日趋复杂的作业环境使机器人群集时刻面临障碍物、外部威胁等危险场景[2],严重影响了其任务完成效率与群体安全。因此,如何在外部威胁下实现群集机器人的高效协同避险,是其向实用化迈进过程中急需解决的问题。
近年来,关于群集机器人协同避险的研究,已有一定成果出现。文献[3]根据多路传感器采集到障碍物距离信息,提出了一种基于多传感器融合与模糊控制的避障算法,实现了群集机器人在未知环境中的准确避障。文献[4]将增强学习方法引入群集协同控制中,设计了基于Q-learning的移动机器人局部避障路径规划机制,实现了复杂环境中机器人群集对外部威胁的自主应对。文献[5]采用区间二型模糊神经网络来提升机器人避险运动的平滑性,有效抑制了避险过程中的大幅度震荡。文献[6]讨论了仅利用距离传感器实现蛇形机器人在未知环境中的自主避险问题。文献[7]借鉴生物群集避险行为对无人机群的自主避险控制进行了研究。然而,上述研究多遵循以“信息一致性”为基础的平均式交互规则,容易导致原本就稀疏的外部有效刺激信息在群内被淹没与“中和”,阻碍了外部有效刺激信息在群内的传播,存在避险效率不高、环境适应性差等缺陷[8],成为群集机器人技术发展的瓶颈。
反观自然界生物群集(如椋鸟群、沙丁鱼群等),其在集体运动中个体仅通过与周围有限个邻居的运动交互即可实现对威胁的灵活规避[9]。研究表明[10,11],生物通过有选择地与特定的邻居进行信息交互,可实现威胁信息在群内的定向传播,从而显著提高群集运动的灵活性和避险效率。受此启发,本文提出一种基于选择性交互的群集机器人协同避险方法。该方法通过引入选择性交互行为实现外部威胁信息在群集内高效定向传播,从而使机器人个体在外部感知信息有限的情况下,仅通过机器人之间的局部交互,就能稳定高效地完成避险的行为。仿真结果验证了该方法的可行性和有效性。
2 问题描述
考虑由N个结构简单、功能单一、成本低廉的同构机器人组成的群集机器人系统。假设机器人个体具有有限的感知能力,仅能够获得感知范围内的邻居的位置和速度等信息。在此,将群集机器人系统中的第i个机器人个体动力学模型描述为

(1)
其中,xi(t)表示第i个机器人的位置,vi(t)为其速度,ui(t)代表其加速度。在本文中,ui(t)作为机器人个体的控制输入。
本文旨在构建一种新的信息交互规则,可在机器人仅感知有限外部信息的前提下,通过邻居间的运动交互,有效地促进外部有效威胁信息在群内的定向传播,避免“平均”作用对外部威胁信息的稀释,使群集机器人协同避险行为稳定高效地实施。
3 基于选择性交互的群集机器人协同避险方法
3.1 机器人选择性交互行为建模
在生物群集中,存在个体与其距离最近的邻居之间的交互密切、对视场范围内视觉特征显著的少数邻居做出反应等行为偏好[12][13]。受此启发,结合上述生物“偏好性”的特点,提出一种机器人个体受感知范围内距离最近的邻居和速度突变最明显的邻居影响最大的选择性速度协同模型。
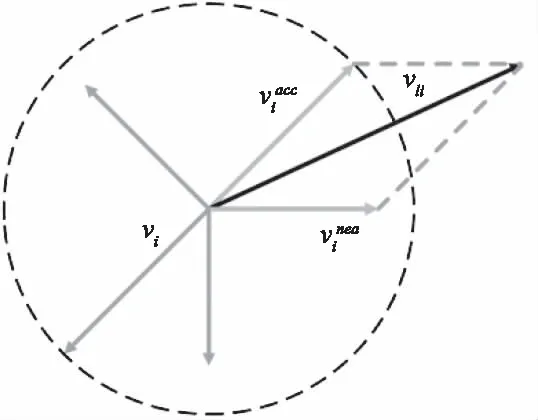
图1 选择性交互模型示意


(2)

3.2 基于选择性交互的群集机器人运动协同策略
在群机器人协同避险过程中,为了保证编队稳定性以及在遇到外部威胁时避险的快速有序性,在此提出了一种将“平均”速度和选择性交互速度相结合的速度协同策略:

(3)

3.3 基于选择性交互的群集机器人协同避险算法
以(3)中的基于选择性交互的群集机器人运动协同策略为基础,提出一种基于选择性交互的群集机器人协同避险控制算法:

(4)
其中,机器人i的控制输入ui由四个部分组成:

(5)




(6)
其中,pgain和vgain分别为位置反馈系数和速度反馈系数。


(7)
其中,M={i:‖xk-xi‖≤d,i=1,2…N}表示能感知到外部威胁的机器人集合;d表示机器人对外部威胁的感知半径;kesp表示避险势场系数。
此外,引入g(g=0或1)表示机器人个体是否能够直接感知到外部威胁信息。
可见,以上基于选择性交互的速度协同机制具有明显的“选择性特征”,机器人个体并非对感知的范围内所有的邻居做出协同反应,而是选择其中距离最近和速度变化最大的两个邻居进行信息交互,通过增加此项速度负反馈调节,可以使机器人个体对外界威胁信息的间接感知能力增强,从而兼顾协同编队和协同避险两方面的需求,既能实现避险过程的稳定有序,同时提高了避险的效率。
4 仿真验证
为验证本文提出的基于选择性交互的群集机器人协同避险算法的有效性,建立单捕食者-群集机器人追逃场景,对其展开仿真研究。
假设捕食者具有全局感知能力,其初始位置为[100,100],捕食者的运动行为亦遵循式(2),其控制输入满足
(8)
其中,cprey表示捕食势场系数,xprey为捕食者的位置。

4.1 仿真结果
为使群集机器人的协同避险过程更为直观,在此用四副子图表示群集机器人在典型时刻的运动状态。其中,紫色圆点表示捕食者,蓝色圆点代表机器人个体,绿色圆点表示感知到外界威胁信息的个体,黄色圆点表示感知到外界威胁信息并做出避险反应的个体,红色圆点表示未感知到外界威胁却做出反应的个体。实验结果如图2所示。
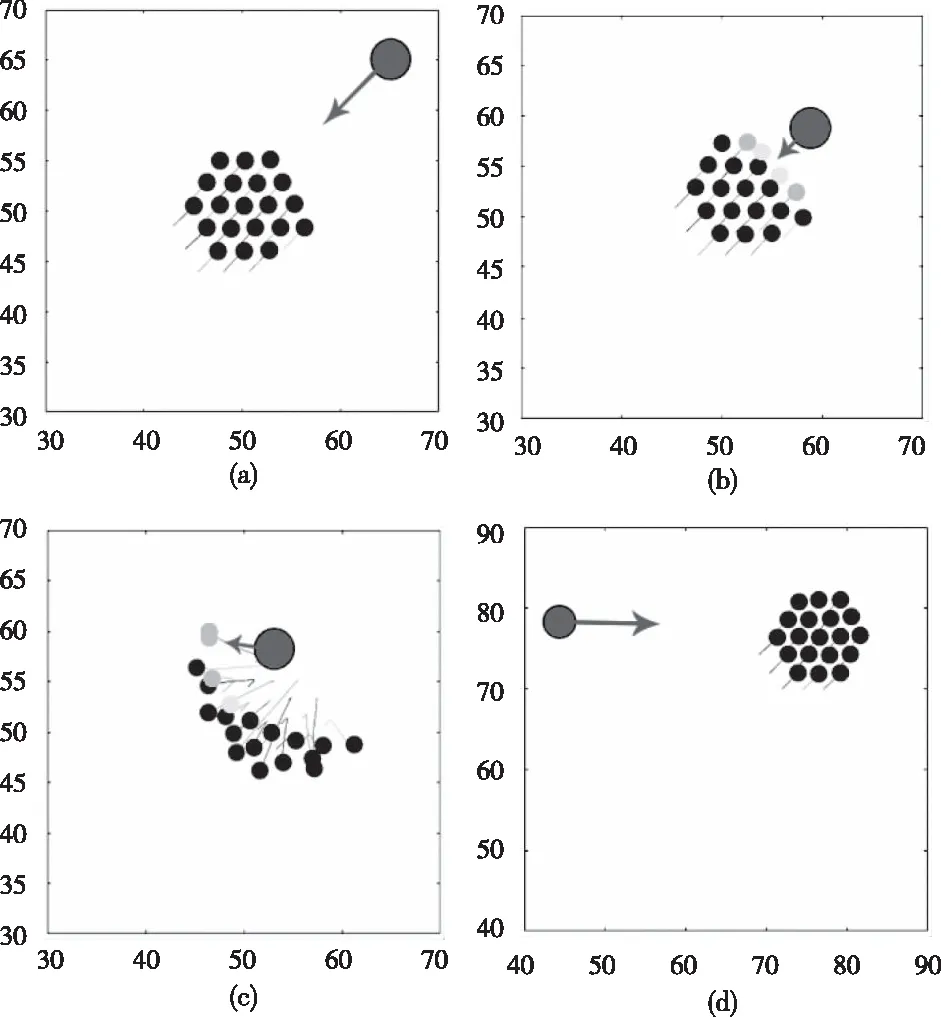
图2 群集机器人避险过程
从图2(a)和(b)可以看出,机器人群集在未感知到外部威胁时整齐编队朝着目标靠进,当群集边缘的少数机器人感知到外部威胁的瞬间,距离威胁最近的机器人率先做出避险反应;从图2(c)可以看出,当群集边缘的机器人感知到外部威胁并做出避险反应时,整个机器人群集之间通过选择性交互实现信息的隐式传递并做出避险反应,展现出本方法良好的协同避险能力;从图2(d)可以看出,首个机器人被捕食之后,剩余的机器人重新形成新的编队继续朝着目标前进。
从上述仿真结果可以看出,本文所设计的基于选择性交互的群集机器人协同避险算法能够有效的实现群集机器人协同编队及协同避险,具备良好的稳定性和有序性。
为更直观的展示群集机器人在遇到外部威胁时机器人间信息传递状态,群集机器人信息传递网络拓扑图如图3所示。

图3 群集机器人信息传递拓扑演化
图3中,绿色圆点表示感知到外界威胁信息并做出反应的机器人个体,红色连线部分即为未感知到外部威胁信息的机器人个体通过个体间选择性交互从而做出避险反应的信息传递网络。图3(a)到(d)展现了隐式信息传递的网络拓扑变化过程,可以看出随着信息的传递,未感知到外界威胁信息而做出反应的机器人个体逐渐增多,表明了选择性交互速度协同策略提高了整个机器人群集对威胁信息的感知能力,从而提高了整个群集的避险效率。
4.2 对比分析
为进一步验证本文所提出的基于选择性交互的群集机器人协同避险群集方法的优势,以存活时间和首个个体死亡时间作为评价指标,将其与采用“平均”信息交互的群集机器人协同避险行为进行对比分析。
在此,将存活时间定义为所有个体被抓捕所需的时间,首个个体死亡时间定义为抓捕到第一个机器人个体所需的时间,均以s为单位。为了减少随机因素的影响,每组参数独立运行100次仿真后统计平均值再比较。仿真对比结果见表1和表2。
表1 选择性交互群集避险与“平均”信息交互群集避险的群集存活时间对比
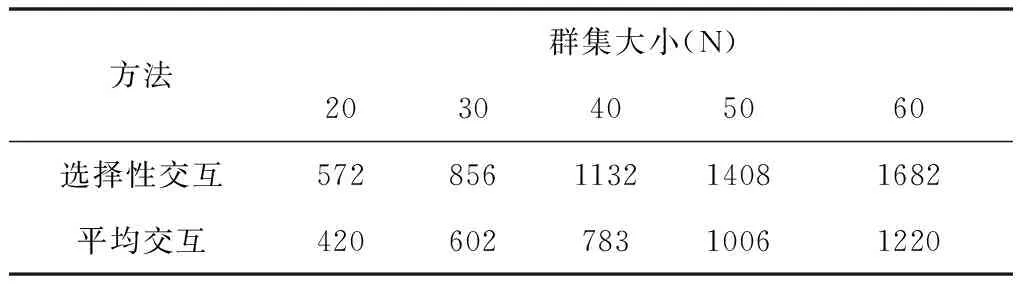
方法群集大小(N)2030405060选择性交互572856113214081682平均交互42060278310061220
表2 选择性交互群集和“平均”信息交互群集首个被捕食个体时间对比
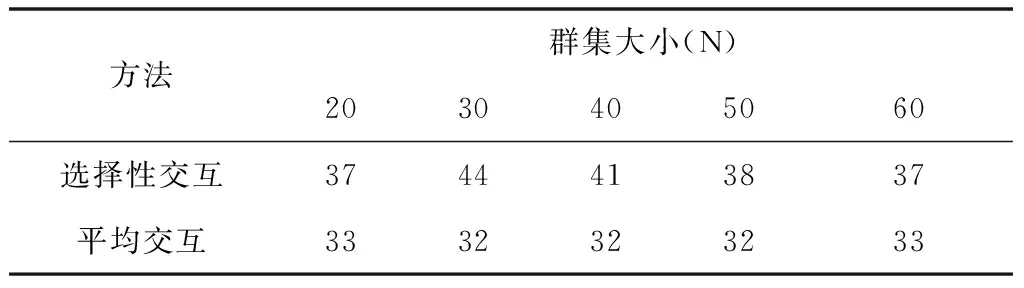
方法群集大小(N)2030405060选择性交互3744413837平均交互3332323233
从表1和表2可以看出:
1) 对于相同规模的群集,采用选择性交互协同避险的机器人群集存活时间和首个被抓捕到的个体所用时长均比“平均”信息交互群集长,平均存活时间可延长39%,首个个体存活时间可延长21%,表明选择性交互算法对避险效率的提高起到一定的作用;
2) 两种方法下群集的存活时长和首个被抓捕到的个体所用时长随个体数量的增加呈现递增趋势,随着个体数量的增加,群集存活时间延长,且首个个体存活时间也变长,其中采用选择性交互协同避险的群集随着个体数量的增加群集存活时长增加幅度更大,表明选择性交互算法的高效性。

5 结论
本文针对群集机器人的协同避险问题,提出了一种基于选择性交互的群集机器人协同避险控制方法。该方法通过个体选择性交互行为实现外部有效威胁信息在群内的定向传播,并结合“平均一致性”规则使得机器人群集在外部威胁刺激下能稳定有序的避险。本文所提的方法兼顾了机器人群集避险的稳定性和高效性,有效提高了群集的生存率和任务执行效率。