基于总能量的小型无人机纵向控制器研究
2021-11-17李东武
李东武,孟 浩,周 毅,傅 宁
(1. 天津航天中为数据系统科技有限公司,天津 300301;2. 天津市智能遥感信息处理技术企业重点实验室,天津 300301)
1 引言
近年来随着无人机的应用越来越广泛,任务航线日趋复杂,频繁的变高飞行成为行业应用中不可避免的飞行方式,这对无人机纵向航迹控制提出了更高的要求。传统的无人机纵向控制方法是对油门通道和高度通道进行分别设计,而且对于巡航、爬升、下滑等不同飞行模态需要分别设计控制,同时还要考虑控制器切换的问题,无人机速度和高度间的耦合使得基于传统设计方法的纵向控制器设计过程极其复杂,调试过程也很繁琐。Lambregts于1983年提出了一种基于能量的纵向控制系统设计思路——总能量控制。总能量控制的核心思想是从无人机系统能量的控制和转化的角度出发,将高度、速度的控制问题转化为系统总能量变化率及能量的分配率的控制问题,从而实现高度和速度之间的解耦控制。
本文基于Lambregts的总能量控制理论,设计某小型无人机在不同运动模式下均适用的一体化纵向控制器,并通过仿真,与传统设计方法进行对比分析。
2 总能量控制原理
无人机纵向的运动方程为
(1)
(2)
式(1)和(2)中表示航迹角,T表示发动机推力,D表示阻力,V表示飞行速度,m表示无人机质量,g表示重力加速度。
由于无人机在飞行中,一般航迹角较小,因此可以认为:sinγ=γ,可得
(3)
无人机总能量ET为动能和势能之和

(4)
单位重量的总能量E1为
(5)
对上式微分可得

(6)


(7)
假设短周期内阻力无变化,且可通过配平推力来补偿,可得

(8)

3 基于总能量控制的纵向控制器设计
基于总能量控制策略的纵向控制器设计主要包括两部分,一是总能量核心控制器设计,另一个是高度和速度控制器设计。
3.1 总能量核心控制器设计
总能量控制的核心思想是用推力控制系统总能量的变化率,用升降舵控制系统能量的分配率。为了消除稳态误差,一般采用比例加积分的控制器结构,可以得到总能量控制的核心控制器为
(9)
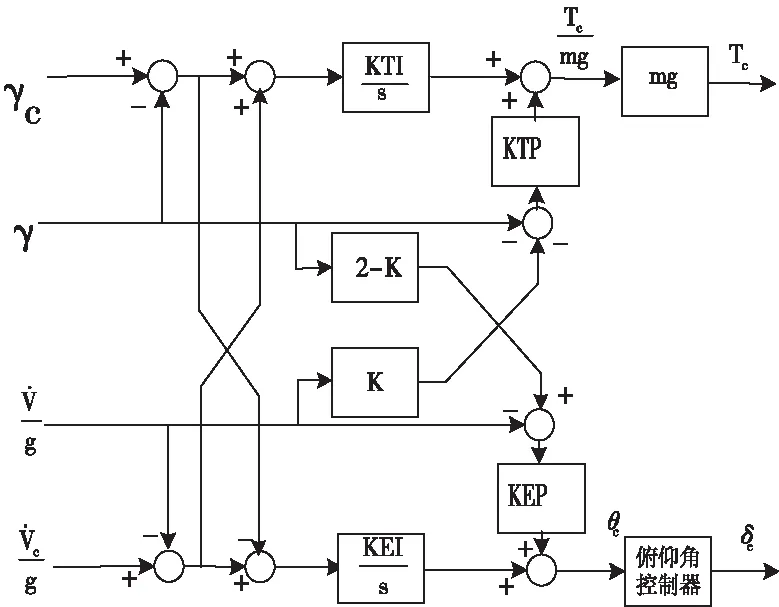
图1 总能量控制核心控制器结构图
总能量控制的核心控制器设计说明:
1) 控制器输出中的推力是归一化的,即为推力比飞机重量;
2) 为了增加短周期阻尼,升降舵通道引入俯仰角控制;
3) 结构图中K为控制优先级因子,其取值范围为[0,2]。当油门饱和时,若K=0,控制器优先保证高度控制;若K=2,则控制器优先保证速度控制;若K=1,则高度和速度的控制优先级相同。
3.2 高度和速度控制器设计

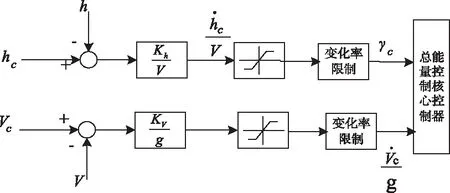
图2 高度和速度控制器结构图
高度和速度控制器设计说明:
1) 高度和速度误差将分别沿时间常数为Kh和Kv的指数曲线衰减,因此为了保证高度控制和速度控制通道的解耦,需要保证Kh=Kv;

4 仿真分析
根据上文所述的总能量控制系统(TECS)的设计方法,以某小型低速固定翼无人机为例,设计纵向控制器。以非线性六自由度模型为被控对象,在matlab/simulink中仿真,并和传统的SISO设计方法进行对比分析。
无人机主要参数如表1所示。
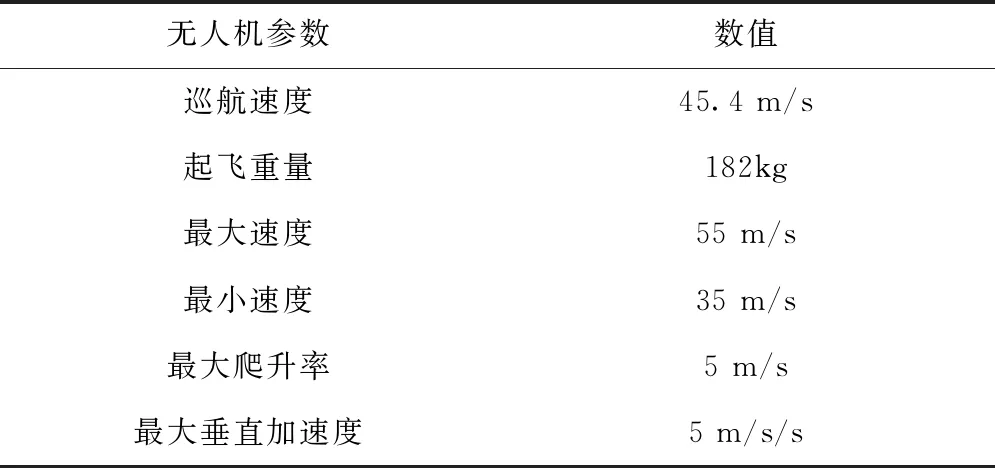
表1 某小型无人机参数
选取Kh=Kv=0.2,Ktp=Kep=1,Kti=Kei=1,控制优先级因子K=1,无人机以巡航速度45.4 m/s,在海拔高度1100m平飞。
在仿真50s处对给定高度施加50m的阶跃,高度、速度、油门给定、俯仰角给定的响应如图3所示。从高度响应曲线可见两种方法设计的控制器均能在30秒内达到给定值,且均无超调。从速度响应曲线可见,基于总能量的控制器明显具有更好的解耦特性,由高度变化引起的速度耦合波动小于0.1m/s,而SISO方法设计的控制器有明显的耦合效应,速度波动超过4m/s,且经过40秒才恢复。

图3 高度给定阶跃50m
在仿真50s处对给定速度施加5 m/s阶跃,高度、速度、油门给定、俯仰角给定的响应曲线如图4所示。从速度响应曲线可见采用两种方法设计的控制器均能在30秒内达到给定值,且均无超调。从高度响应曲线可见,基于总能量的控制器明显具有更好的解耦特性,由速度变化引起的高度耦合波动小于0.8m,而SISO方法设计的控制器有明显的耦合效应,高度值波动超过1.5m/s,且恢复较慢。
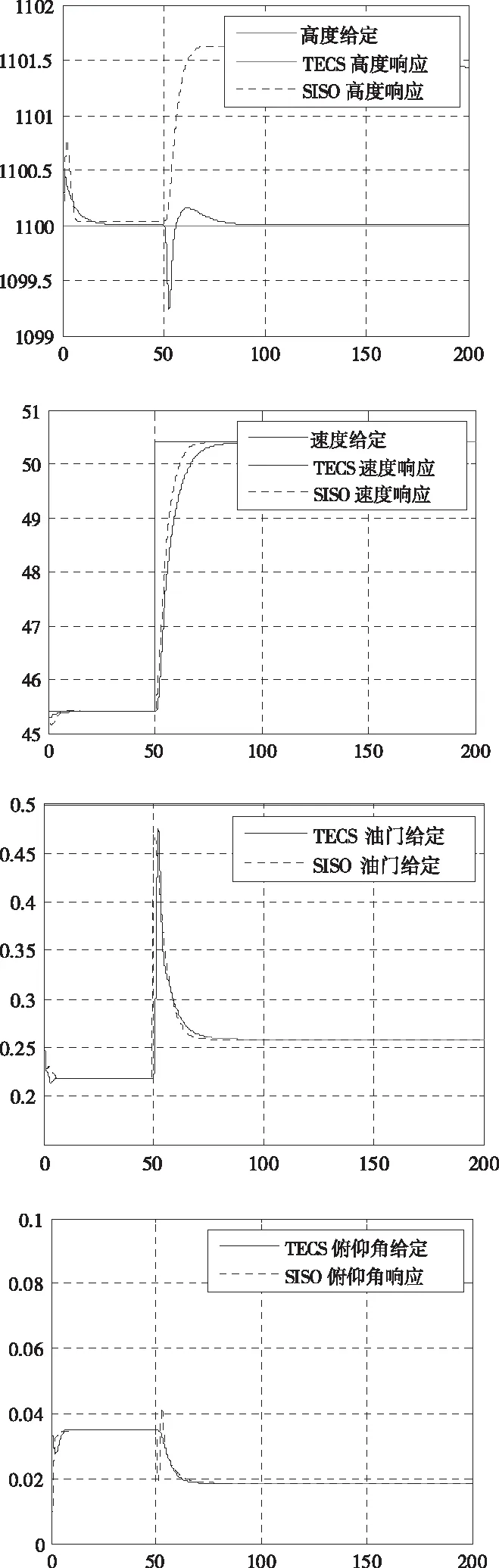
图4 速度给定阶跃5m/s
在仿真50s处同时对给定高度和给定速度分别施加50m阶跃和5 m/s阶跃,系统的高度、速度、油门给定、俯仰角给定的响应曲线如图5所示。从高度响应曲线可见:采用总能量控制方法设计的控制器能在30秒内达到给定值,且无超调,但是采用SISO控制器的高度响应有2m的稳态误差,造成此现象的原因有两个,一是高度控制器无积分,二是速度控制通道与高度控制通道的耦合效应。从速度响应曲线也可以看出,基于总能量的控制器明显具有更好的解耦特性,速度阶跃相应在30秒内达到给定值,且无超调。
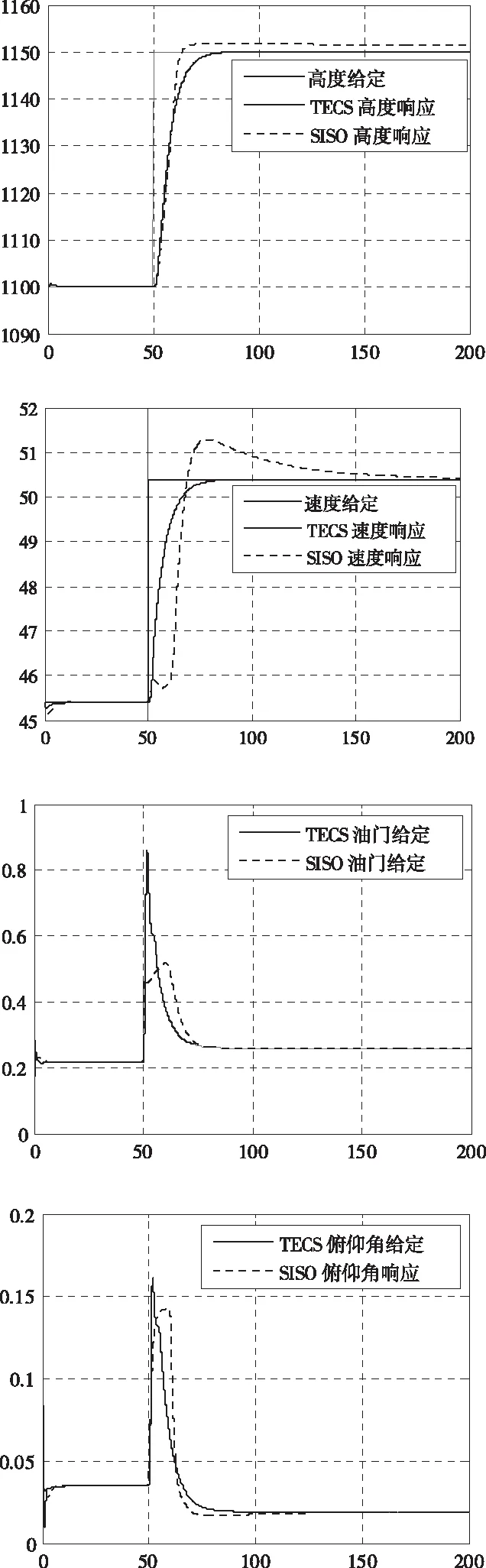
图5 高度给定阶跃50m,速度阶跃给定5m/s
5 结论
本文基于Lambregts的总能量思想,结合小型无人机的性能约束条件,研究了适用于小型无人机的纵向总能量控制器设计方法,实现不同飞行模态的控制器的统一控制。非线性仿真结果表明,所设计的控制器能够较好地实现不同飞行模态的高度和速度控制,和传统的单入单出设计方法相比,具有更满意的解耦特性和控制性能。