法兰式张力传感器的应用介绍
2021-11-15沈力
沈力
深圳市鑫精诚科技有限公司,深圳 518115
0 前言
张力控制器主要被广泛应用于实时监控带状材料、布状材料、条状材料和线状材料在生产过程中的张力大小情况。这些材料在放卷和收卷过程中,它们的卷径会不断地发生变化,另外,由于设备运转的同步性不一致,所以极易导致卷材张力过紧或松弛等现象[1]。如果卷材的张力过大,会造成加工材料发生拉伸变形,甚至断裂;如果张力过小,就会使卷材缺少绷紧力,从而造成收卷不整齐,导致出现收卷后的卷材厚度不均、松弛、褶皱等质量隐患,因此,对于张力的控制就成为高精度卷绕系统中非常关键的一个环节[2-3]。
早期的张力控制是靠检测电机的电流来标定测量张力力值,从而进行闭环控制的。但是这种方法自身的精度就很差,而且还要实时地对卷材厚度和卷材材料以及卷绕速度进行张力值补偿,控制难度非常大且效果不好。目前,越来越多的厂家采用电阻应变式的张力传感器(以下简称张力传感器)用于张力控制系统的闭环控制,这是由于张力传感器拥有精度高、安装简单方便、输出信号稳定等优点,使得闭环控制变得比较简单,易操作。
目前,高端的张力传感器大多数是国外品牌,比如:美塞斯、蒙特福、E+L、FMS等,他们对于张力传感器的研究较早,积累的测试数据量大,所以有着较大的市场占有量。最近,随着国内的张力传感器自主研发的发展,制造工艺的突破和制造技术的进步,越来越多的国外品牌传感器已经慢慢被国内产品所替代,同时,也有大量的创新的知识产权被国内厂家所申请。
目前,市场上的张力传感器按安装方式可以分为单侧安装和双侧安装两大类。按传感器自身结构可以分为:悬臂式、法兰式、穿轴式、轴座式、轴头式等几大类,这些结构几乎涵盖了所有的张力测量类型[1]。本文将着重介绍两种双侧安装的法兰式张力传感器的主要结构及区别、弹性体设计方法、传感器结构设计注意要点和安装注意事项。
1 法兰式张力传感器介绍
法兰式张力传感器一般成对地被安装在测量辊的左右两末端,可以精确地检测各种包裹角度拉动材料所产生的合力。传感器按对辊筒轴的不同被固支的方式可分为C型块固支结构和调心球轴承固支结构两种。
1.1 C型块固支结构
传感器与辊筒轴之间用C型块固支,用螺钉进行拧紧固定,此类型的传感器和滚筒轴之间不带轴承,所以要求用于此结构的辊筒自带滚动轴承。传感器的安装方式如图1所示。

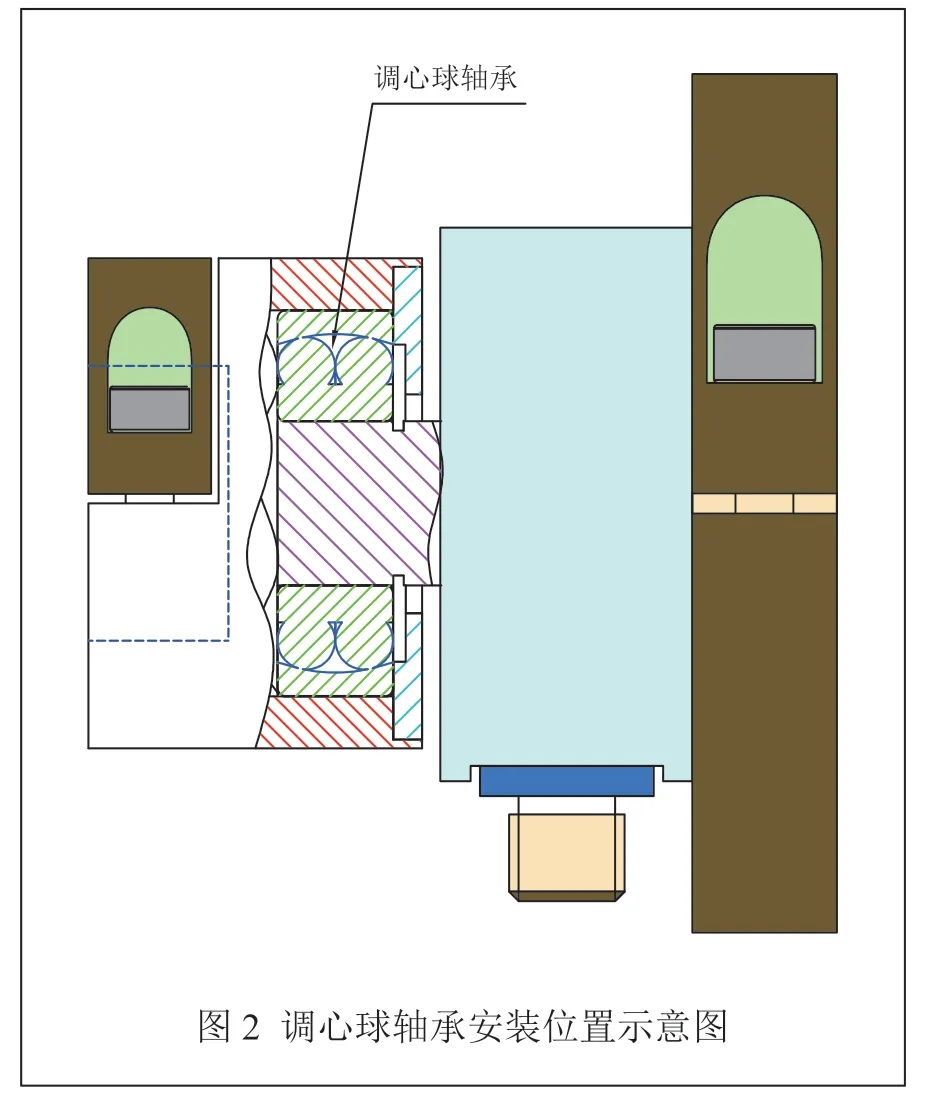
传感器被安装在辊筒轴的两侧,因为存在安装孔的尺寸偏差、安装面的平行度偏差以及传感器自身的尺寸误差等因素,导致传感器在实际的安装过程中容易产生机械别死和安装不水平等问题,从而导致传感器安装后产生零点变大、不回零,甚至过载损坏等问题,对传感器的精确测量造成影响。针对这些问题,该传感器在内部设计了调心球轴承结构,如图2所示。
通过设计销钉和转动孔等结构,对调心球轴承的转动角度进行限制,确保其只能有±3°左右的摆动,既不影响传感器的实际使用,又能解决机械误差带来的各种安装问题。
1.2 调心球轴承固支结构
图3所示为调心球轴承固支结构的传感器,该传感器的末端自带调心球轴承,用于固支辊筒轴。
传感器同样地被安装在辊筒轴的两侧,由于此传感器的结构已经存在了滚动轴承,所以可以简化客户的辊筒和中心轴的结构,省去它们之间安装的轴承。此外,滚动轴承采用的是调心球轴承,该调心球轴承也可以补偿由于安装导致的机械误差。
2 传感器弹性体的设计
2.1 结构设计与原理
上文介绍的两款不同结构的张力传感器,无论是C型块固支结构还是调心球轴承固支结构,只是在传感器的安装方式、固支结构、对于滚筒要求等外部结构有所不同,而对于传感器内部的关键核心部件——弹性体的结构设计和原理都是类似的。
弹性体设计应遵循如下的通用原则:应变区受力单一,且应力分布均匀;承载边界及安装力不影响应变区的应力分布;粘贴应变计处应开敞,尽量为平面,便于设计保护外壳或进行防潮密封[4]。

综合考虑传感器的安装结构和使用方式,设计弹性体的整体结构为四孔型对称式平行梁结构,如图4所示。该结构是由上下两个对称的横梁构成的一个整体,左右和上下对称的去除4个小圆柱,形成4个圆孔,圆孔左右之间两两贯通,上下圆孔之间采用线切割割通。该种弹性体结构的电阻应变片粘贴数量为4片,粘贴的位置在4个圆孔和上下横梁之间的壁厚最薄处,从而确保了应变片被粘贴在整个弹性体结构的最大应力位置。

四孔型对称式平行梁结构属于称重传感器弹性体里一种非常经典的高精度结构,它属于弯曲应力的正应力称重传感器结构,但同时也具有切应力传感器的一些特点,所以该结构的弹性体具有如下特点:整体各项性能好、精度高、抗偏载能力强、输出信号大、信号输出对于加载点的位置变化不敏感、传感器制作工艺简单、易操作等。
2.2 弹性体的有限元分析
对弹性体用Solidworks软件进行3D建模,并用其自带的Simulation模块进行静力学的有限元分析,验证结构的合理性与可行性。
(1)选择编辑应用合适的材料,因为该类型的传感器量程比较小,所以选用铝合金材料。牌号为2A12-T6的材料常被用在铝合金传感器上,该种材料为高强度的硬铝材料,其弹性模量为7.2e+10,泊松比为0.33;
(2)根据传感器的实际应用及受力情况对弹性体进行固支和加载相应的力值;
(3)对弹性体进行网格化处理,对应变片的粘贴面和其他关键位置进行网格的细化处理,处理后的弹性体如图5所示;

(4)对弹性体模型进行计算处理,得到弹性体在最大量程下沿着长度方向的法向应变云图,如图6所示。

从应变云图结果可知,弹性体最大应变处出现在设计粘贴应变片的位置,即4个圆孔和上下横梁之间的壁厚最薄处。此4处位置的应变集中,最大应变值可以满足传感器的信号大小要求,且在强度上预留有足够的防过载余量,贴片区域的应变均匀,可以满足制作高精度传感器的受力要求。
(5)对贴片横梁上的所有节点沿着长度方向的法向应变进行探测,每间隔0.2 mm取一个点形成图解,如图7所示。

由图可知,弹性体贴片面的正负应变值变化均匀且对称相等,满足高精度传感器的应变要求,在该应变条件下,传感器的输出信号可以满足2.0±0.2 mV/V的要求。
3 传感器其他设计注意要点
3.1 轴向缓冲结构设计
在传感器的实际安装过程中,经常会存在员工装配辊轮轴的时候用力过大的情况;其次,由于尺寸公差的原因,导致传感器在安装完成后也可能会承受轴向力;另外,在使用过程中,被卷材料也会传递一些不规律的轴向力,以上3种情况都会导致传感器的零点异常、输出信号波动不稳定,甚至过载损坏等问题,所以对传感器设计轴向缓冲结构就非常有必要。
目前,国外比较常见的方法是使用波型垫圈来实现。当传感器受到轴向力后会导致波型垫圈发生一定变形,从而缓冲了部分的轴向力,当轴向力消失后,波型垫圈自动恢复到之前的状态,从而实现了对轴向力的缓冲。
但在波型垫圈受轴向力变形后,实际传感器还是受到了轴向力,传感器的零点数据还是可能会发生变化,基于此不足,笔者在采用波型垫圈的同时,还在弹性体上采用U型柔性隔离槽的新型结构来做轴向缓冲,从而进一步减少轴向力对传感器信号和精度的影响。
3.2 避空隔离槽结构设计
设备的安装面往往会存在粗糙度或者平整度的问题,从而导致传感器安装后零点超出要求范围很多,所以在传感器的安装底面上增加圆形避空隔离槽就非常必要。圆形避空隔离槽结构如图8所示。

在传感器的底面上设计了一个沉孔做为隔离槽,在设计该隔离槽时需确保隔离槽的直径大于弹性体贴片处的最大直径,这样的设计可以使小于该直径的安装面粗糙度问题被该隔离槽隔离去除,而大于该直径的粗糙度问题并不会对传感器的零点造成影响。该种方法已经申请了专利保护,申请号为202022302451.4。
3.3 分体式结构设计
目前,市场上绝大多数张力传感器的轴承连接件和传感器本体之间是一个整体结构,即单个规格的传感器只能适用安装一种型号的轴承,导致传感器的通用性差,如果设备需要更改不同轴径的滚筒,就需要重新非标定制新的传感器,这样增加了生产成本,也降低了替换的效率。
基于此不足,笔者设计了一款轴承连接件和传感器本体可拆卸的分体式结构,两者之间用螺钉紧固连接,拆装非常方便,且整体的安装强度可以保证。如图9所示。

这样,针对不同轴径的张力辊,只需单独生产与轴径配套的连接件即可,从而避免了为不同轴径的张力辊而大量生产非标的张力传感器的情况,增加了传感器的通用性,节省了传感器的更换时间,也避免了经常拆装而导致的传感器损坏。该种方法已经申请了专利保护,申请号为 202022302410.5。
3.4 防过载结构设计
因为设备再启动的瞬间会有一个比较大的惯性力,所以对传感器的防过载结构设计非常重要,尤其对于小量程的传感器,在安装调试的过程中非常容易被过载损坏,所以在传感器内部设计防过载结构就显得尤为重要。
目前,市场上大多数平行梁结构的传感器其防过载结构都是从外嵌入一个小圆柱体,或者外置一个防过载螺钉来实现防过载设计,这种设计造成装配和加工难度都很大。
笔者根据以上不足设计的线切割防过载槽结构,无论是在加工还是装配上都更为简单,线割槽的位置和结构如图4所示,该种结构的防过载原理是当传感器的受力超过额定载荷后,线割槽的缝隙之间就减小到零,缝隙面上下会顶住,从而阻止弹性体变形而达到防过载的目的[5]。该种防过载的方法已经申请了专利保护,申请号为202011103174.2。
4 安装注意事项
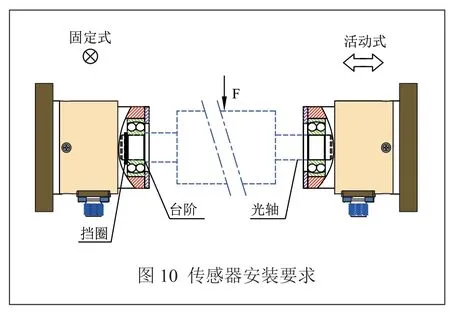
(1)对于调心球轴承固支结构的传感器,在安装时需注意两端中有一端需是固定式的,一般采用轴承挡圈或台阶等方式进行止动固定,另一端需是活动式的,不需要加轴承挡圈或台阶,从而使辊轮可以在轴向有一定的横向位移。如图10所示;
(2)使用时应避免轴与防尘油封产生摩擦,从而带入摩擦力值,影响测量精度;
(3)选用灵敏度最为接近的两个传感器组成一组配套使用,防止被测的材料幅宽不一致或者被测材料位置变化的情况下产生方位误差;
(4)辊轮自身重量不超过传感器满量程的60%;
(5)确保被测材料通过传感器后产生的包络夹角值在30°~180°之间[1]。
5 传感器的受力计算
被测辊轮和导向轮之间的排列方式有以下三种,其传感器的受力计算方法各不相同。
排列方式一如图11所示,当张力的合力方向和辊筒的自重方向呈90°:

其中,F——传感器检测受力;
T——张力;
α——包络夹角(30°≤α≤180°)。
排列方式二如图12所示,当张力的合力方向在第三或第四象限:

其中,P——辊轮自重;
β——传感器检测受力方向和辊轮自重方向的夹角。
排列方式三如图13所示,当张力的合力方向在第一或第二象限:




6 结论
法兰式张力传感器一般常被应用于宽幅材料加工过程中,尤其是在超宽幅的材料加工中有很好的应用,另外,在一些窄幅的材料加工中也有应用,该结构的传感器有安装替换方便、测量精度高、一款传感器可以匹配多种轴径、加工成本较其他结构低等特点,所以,这种结构已经成为张力传感器里应用最为广泛的结构之一。
