基于鱼群算法的复合电源模糊能量管理策略
2021-11-15高建树尹尔乐张钦伟
高建树 尹尔乐 陈 煜 张钦伟
(中国民航大学 天津 300300)
0 引 言
纯电动汽车是一种零污染、零排放的清洁交通工具,但其性能受制于动力电池的性能与车辆本身的能量管理策略,而且单一电源往往不能满足续航需求;超级电容比功率高、可快速充放电、耐大电流,蓄电池比能量高,因此为充分发挥两种电源的优势,制定合理的能量管理策略,满足能量存储和瞬时大电流的需求[1],是复合电源纯电动汽车研究的关键问题之一。
目前国内外研究主要集中在以经典控制、智能控制方法[2-3]为基础来设计控制器,此类方法能够得到较好的鲁棒性,车辆性能有所提升并且实现了组合电源的性能要求,但控制精度差;以智能算法优化控制策略[4-7]并建立精确的数学模型,此类方法提高了控制精度,进一步满足需求且整车能耗经济性得到提高,但仍存在算法不适应、无法得到全局最优的情况。
传统模糊控制策略的制定主要依靠专家先验知识,难免带有主观性与局限性且无法得到全局最优,本文尝试寻找一种新的优化方法以避免上述问题,提出一种基于鱼群优化算法的模糊控制器设计方法。
鱼群算法是一种群寻优方法,其搜索方式简单可并行,能够快速跳出局部极值,收敛速度快,该算法在电网潮流计算与资源配置等问题[8-11]中应用成熟并取得良好控制性能,本文研究的电动车能量管理也属于上述问题,有一定延续性。本文采用鱼群算法对模糊控制器的隶属函数寻优,避免先验知识的主观性与局限性,同时对比未优化的控制策略,突出优化后控制策略在整车耗电量与动力性方面的提升。
1 复合电源拓扑结构
电动汽车复合电源系统由动力蓄电池、超级电容、双向DC/DC变换器及功率变换器组成,本文采用的拓扑结构如图1所示。这种结构的优点是:蓄电池接负载,能量转换效率高;使超级电容的输出电压匹配蓄电池输出电压,总输出平滑;结构简单,成本低且易于控制。
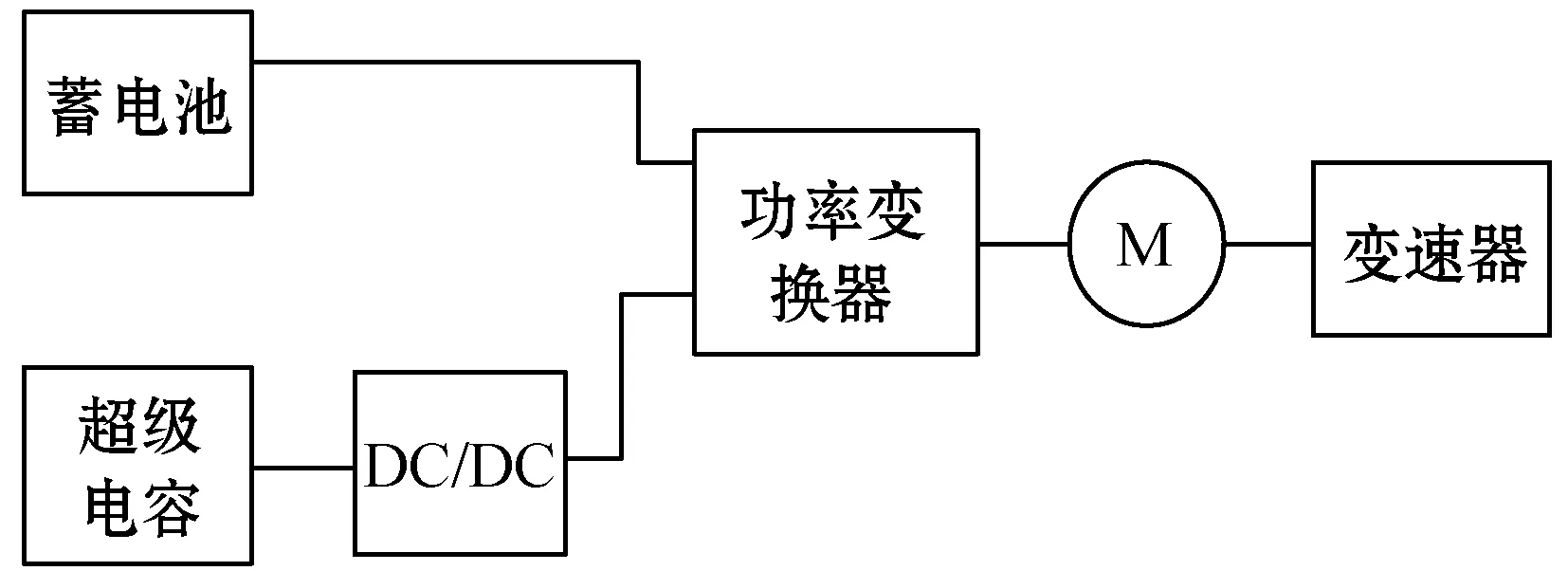
图1 复合电源拓扑图
2 鱼群算法原理
人工鱼群基本思想是:鱼生存数目最多的地方一般为该水域中营养物质最多的地方,依据这一特点来模仿鱼群的觅食、聚群、追尾等行为,从而实现全局寻优[12]。算法采用面向对象的技术重构人工鱼的模型,将人工鱼封装成变量和函数部分[13]。
变量部分包括人工鱼的总数N,人工鱼个体的状态X=(x1,x2,…,xn)(其中xi(i=1,2,…,n)为欲寻优的变量),人工鱼移动的最大步长Step,人工鱼的视野Visual,尝试次数Try_number,拥挤度因子δ,人工鱼个体i、j之间的距离dij=|Xi-Xj|。
函数部分包括人工鱼当前所在位置的食物浓度Y=f(X)(Y为目标函数值)和人工鱼的各种行为函数,如:觅食行为Prey()、聚群行为Swarm()、追尾行为Follow()、随机行为Move()与行为评价函数Evaluate()。通过以上方式,人工鱼的状态可以被其他同伴感知。
随机行为Move()定义如下:
Xj=Xi+Visual×Rand
(1)
式中:Rand是一个介于0到1之间的随机数。人工鱼在视野内随机选择一个状态,然后向该方向移动,执行式(1)。
觅食行为Prey()定义如下:
(2)
(3)
人工鱼某状态下判断极值条件是否满足,若满足则向该方向移动,执行式(2),否则随机移动一步,执行式(3)。
聚群行为Swarm()定义如下:
(4)
根据当前邻域内的伙伴数目nf及中心位置Xc,若Yc/nf>δYi,表明该中心食物较多且不太拥挤,该人工鱼朝中心位置移动,执行式(4),否则执行觅食行为。
追尾行为Follow()定义如下:
(5)
当前邻域内的伙伴中Yj为最大值的伙伴Xj,若Yj/nf>δYi,表明Xj的状态食物较多且不太拥挤,该人工鱼向Xj位置移动,执行式(5),否则执行觅食行为。
3 模糊控制器的设计与优化
3.1 模糊控制策略
目前,模糊控制策略在电动车能量管理策略中应用成熟,该方法主要考虑结构变量、隶属度函数和模糊规则,不需要预知系统的详细数学模型,故能简化系统,非常适用于能量管理策略的问题。
3.2 模糊控制器设计
模糊控制器设计为三输入单输出系统,输入量为超级电容荷电状态SOCcap、蓄电池荷电状态SOCbat、整车需求功率Preq,输出量为蓄电池功率系数Kbat,三者功率关系如下:
Preq=Pbat+Psc
(6)
Pbat=Kbat×Preq
(7)
Psc=(1-Kbat)×Preq
(8)
式中:Preq为整车需求功率;Pbat为蓄电池功率;Psc为超级电容功率;Kbat为蓄电池功率因子,表示蓄电池功率占整车功率的比例。
3.3 隶属函数
首先将输入、输出变量量化取值,再变换到模糊论域内,SOCcap、SOCbat论域取[0.2,0.9],Kbat取[0,1],Preq论域取[-5,5];其次确定模糊子集,本文将输入、输出分别定义为3、5个;最后,以线性插值的方式来确定隶属函数,隶属度函数如图2所示。

(a) SOCbat隶属函数

(b) 驱动工况下Preq隶属函数

(c) 制动工况下Preq隶属函数
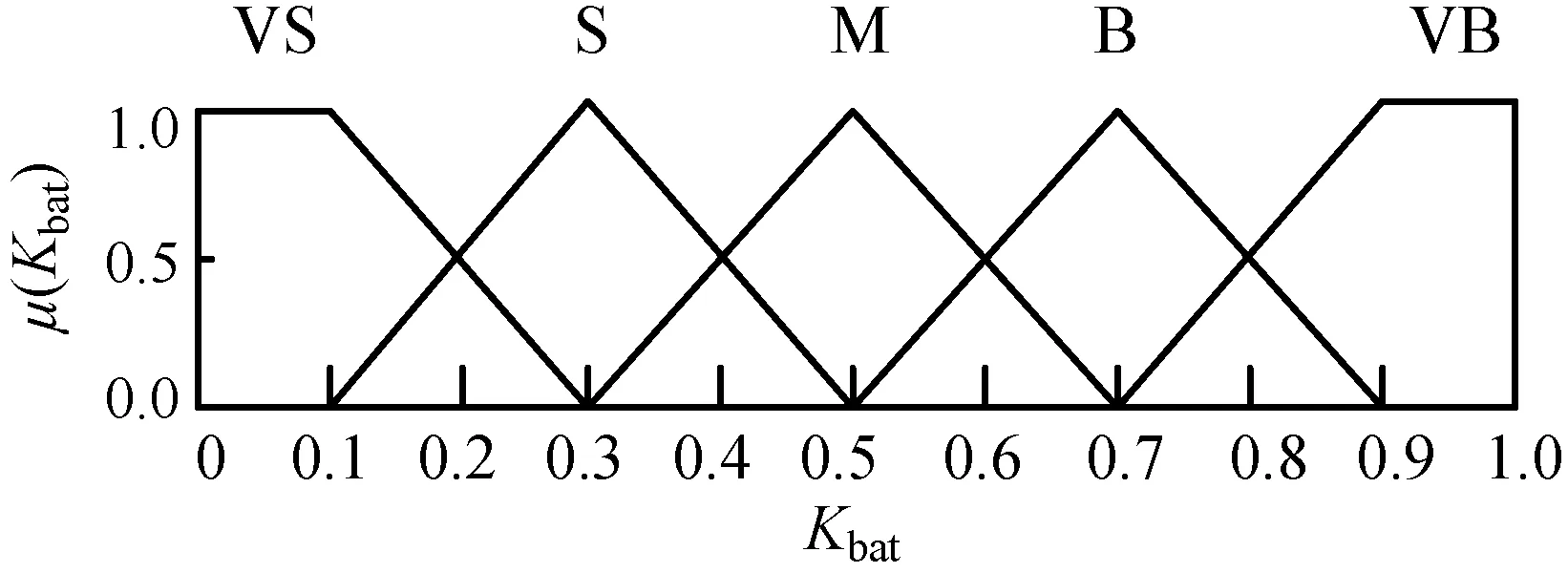
(d) Kbat隶属函数图2 输入、输出隶属度函数
SOCbat模糊子集为{L,M,H};SOCcap模糊子集为{L,M,H};Preq模糊子集为{S,M,B};Kbat模糊子集为{VS,S,M,B,VB}。其中:L表示低,M表示中,H表示高,VS表示很小,S表示小,B表示大,VB表示很大。
3.4 模糊规则制定
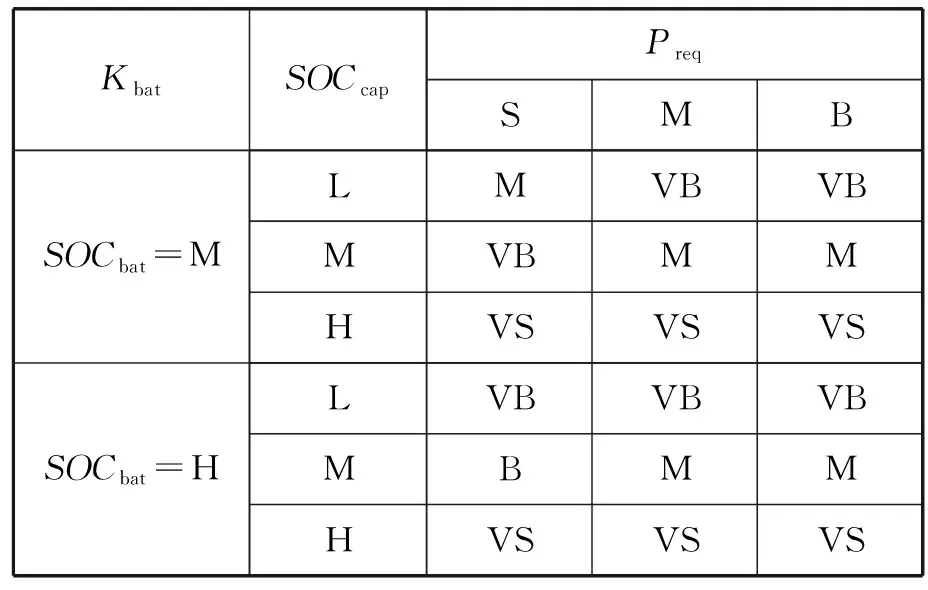
考虑汽车电机驱动、制动两种工作模式[14-15],分别制定驱动工况与制动能量回收工况下的模糊控制规则,如表1、表2所示。模糊规则主要以保护蓄电池,减少大电流充放电情况,保证车辆性能为依据。驱动工况下SOCcap高时需求功率优先由超级电容提供,SOCcap低时由蓄电池单独提供,两者SOCcap都低时共同提供;制动能量回收工况下优先给超级电容充电,SOCcap高时给两种电源同时充电。

表1 驱动工况模糊规则
续表1
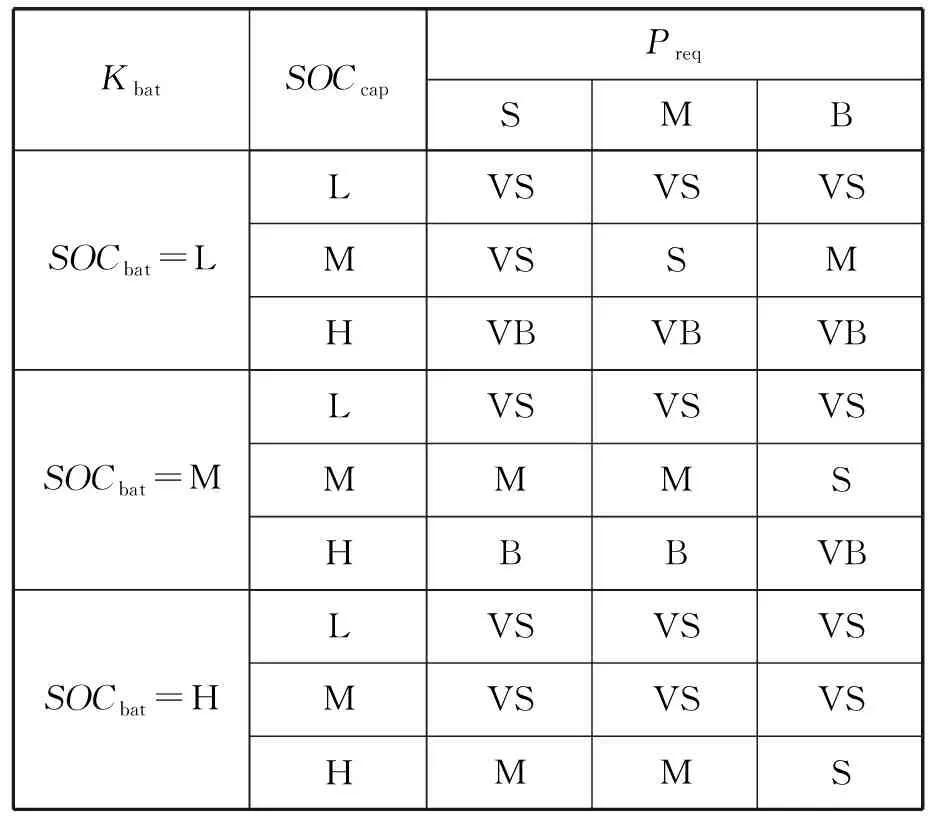
表2 制动能量回收工况模糊规则
3.5 解模糊
模糊控制器得到的变量仍是模糊的,需去模糊化处理,本文采用加权平均值的方法去模糊化,公式如下:
(9)
3.6 控制器的优化
上述控制器的设计带有一定主观性,本文采用鱼群算法离线对隶属度函数进行优化,将优化后的隶属度函数应用于实时能量分配策略中。以蓄电池功率系数为例,如图3所示,需要确定隶属函数在区间[0,1]上的实数取值x1-x5,其他变量的隶属函数待优化变量与此类似。
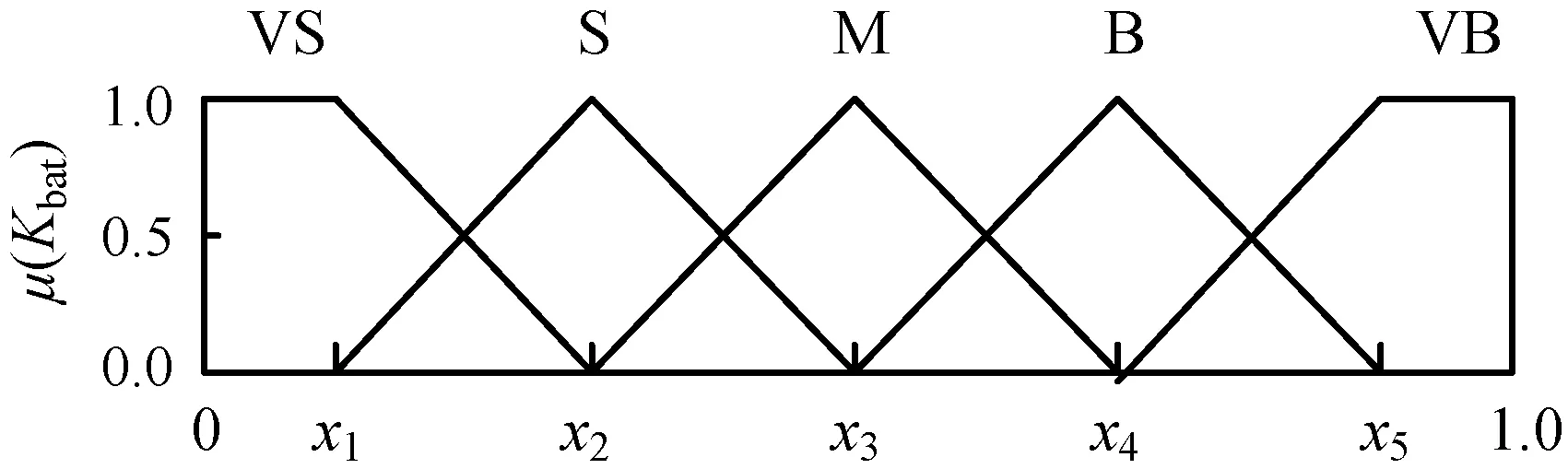
图3 蓄电池功率系数隶属函数优化变量
3.6.1目标函数
本文复合电源能量管理策略的设计依据是在保证车辆动力性的条件下实现整车耗电量最少,目标函数为单位里程耗电量,定义如下:
(10)
式中:Eh为单位里程耗电量;Pt为电源放电功率;Stot为总里程;(t0,tn)为动力电池放电时间。
3.6.2优化步骤
1) 将待优化变量封装成人工鱼进行编码并随机初始化人工鱼的位置和食物浓度,执行随机觅食行为;
2) 对人工鱼状态解码,将解码后的参数作为新的隶属度函数输入到模糊控制器,再结合Advisor仿真并计算目标函数值、约束判断;
3) 更新人工鱼标识牌,根据步骤2)重置个体最优与全局最优值;
4) 返回步骤2)继续执行随机觅食行为,当迭代次数溢出时输出优化后的变量,至此得到优化后的模糊控制器参数。
4 仿真实验
基于MATLAB/Simulink环境搭建复合电源的整车模型并导入到Advisor中进行联合仿真,车辆参数如表3所示。选用UDDS(美国城市道路循环工况)和China-urban(中国典型城市工况)进行验证,将仿真结果对比。

表3 车辆仿真参数
图4、图5分别为China-urban与UDDS工况下车速跟随曲线,可以看出车速跟随良好,实际车速与需求车速曲线几乎重合,说明该复合电源模型满足该工况的一般行驶需求。
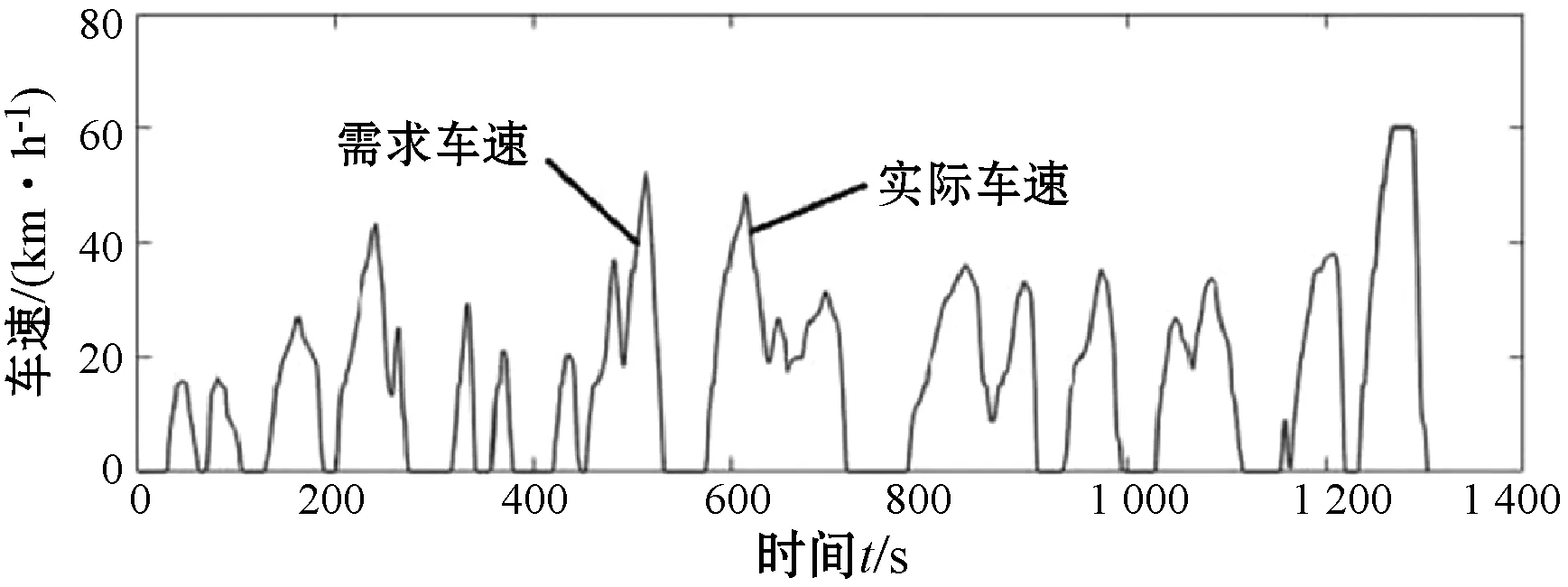
图4 China-urban车速跟随曲线

图5 UDDS车速跟随曲线
图6所示为单一蓄电池与复合电源模糊控制下的电池SOC放电曲线。可以看出,相比单一蓄电池供电,复合电源供电方式下蓄电池SOC下降较慢,速度平缓,从而减少了蓄电池放电时间,可以延长蓄电池使用寿命,增加车辆续驶里程。

图6 电池SOC下降曲线
图7所示为单一蓄电池与复合电源模糊控制下的电源放电曲线。
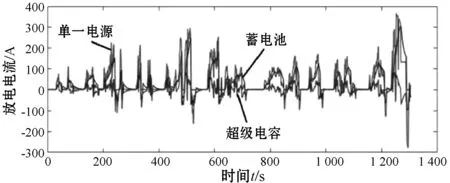
图7 电池放电曲线
相比单一蓄电池,复合电源模糊控制策略突出以下优势:
(1) 当车辆峰值电流出现时,蓄电池放电电流明显降低,超级电容提供一部分需求电流;充电电流波谷出现时,超级电容优先充电,充电电流大于蓄电池的充电电流,这样蓄电池不会出现大电流充放电情况,保护蓄电池的同时实现了超级电容“削峰填谷”的功能。
(2) 蓄电池整体放电曲线下降且放电区间波动较小,但需求电流主要仍由蓄电池提供,超级电容提供了一部分需求电流,降低了蓄电池的工作负荷,实现了两种电源的功率分配。
(3) 制动工况下优先给超级电容充电,由于超级电容可快速充放电,保护动力电池的同时提高了能量回收率。
以上结论说明本文的模糊控制策略能够实现对复合电源能量的合理分配,发挥超级电容大电流放电、蓄电池比能量高的优势,实现超级电容“削峰填谷”功能,改善蓄电池工作条件,提升车辆性能。
图8、图9所示为China-urban与UDDS两种工况下的能耗曲线,两种工况在起始阶段功耗曲线几乎重合;之后进入频繁起停、变速工况,优化后控制策略(FA-Fuzzy)下的能耗曲线变化要慢,这是因为制动工况下超级电容能够快速充电,能回收较多的电能加以重复利用。总能耗开始低于模糊控制策略(Fuzzy)且趋于平缓。
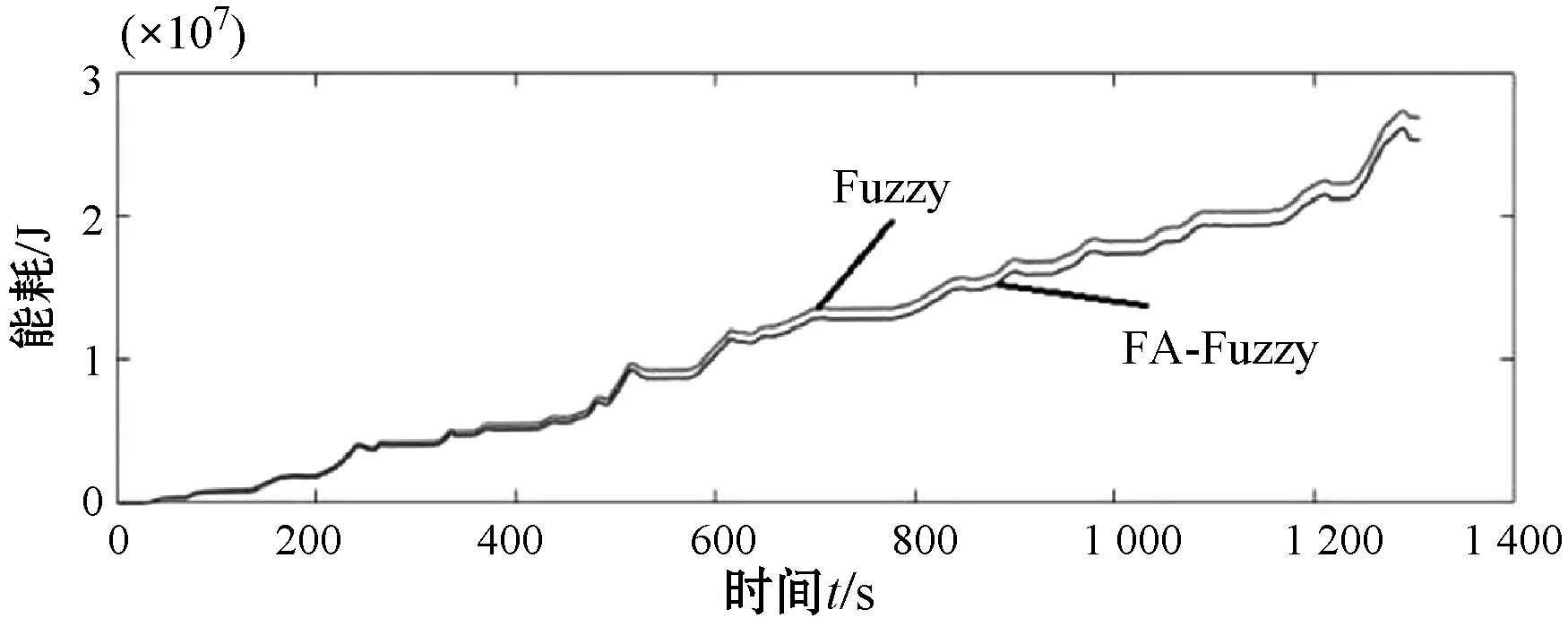
图8 Chinaurban工况总能耗曲线

图9 UDDS工况总能耗曲线
表4所示为两种工况下的能耗对比,相比模糊控制策略,优化后的策略在China-urban和UDDS工况下总能耗分别降低了5.74%、6.38%。其他条件不变情况下,同一工况下续驶里程分别延长了0.34 km和0.76 km。
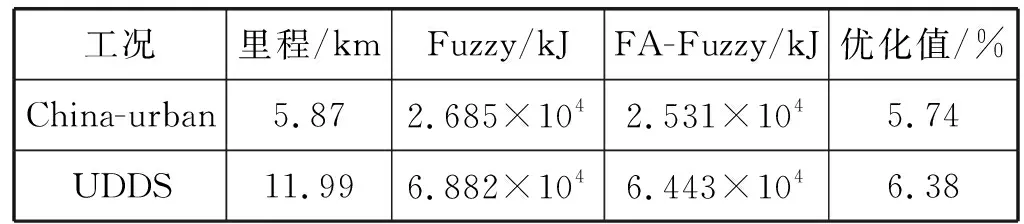
表4 两种工况下能耗对比
5 结 语
本文针对电动车复合电源的能量分配问题设计了模糊控制策略,考虑驱动与制动两种工况,分别制定了模糊规则,以需求功率、电池SOC、超级电容SOC为输入,蓄电池功率因数为输出设计了模糊控制器,在MATLAB/Simulink环境下搭建了整车模型,导入advisor中联合仿真,在两种典型工况下实现了功率在动力电池和超级电容间的合理分配,能够发挥蓄电池比能量高、超级电容比功率大的优势,实现超级电容“削峰填谷”的功能,得到更好的车辆性能;同时采用鱼群算法对模糊控制器的隶属度函数进行优化,降低了整车功耗,经济性得到提升,同时保证了车辆动力性。
