旋转型超声电机压电振子的研究
2021-11-12王笑竹
王笑竹,张 健
旋转型超声电机压电振子的研究
王笑竹,张 健
(营口理工学院,辽宁营口 115014)
运用ANSYS软件对圆盘形压电振子进行模态分析,分析了圆环凸齿高、附加齿高对弯曲模态的影响。结果表明,当凸齿高为2.1 mm、附加齿高为0.6 mm时,圆盘形压电振子具有理想的振型且齿的位置最佳。根据模态分析结果试制了圆盘形振子,进行了实验测试,实验结果与模态分析结果大致相同。
模态分析 圆盘形 齿 实验测试
0 引言
超声电机是一种直接驱动器,如果设计合理,应用得当,超声电机可和电磁电机取长补短,获得更加广泛而有效的应用。驻波型旋转超声电机作为行波超声电机的必要补充,因其具有驱动和控制电路简单, 辅助装置较小等突出优点,近年来受到人们的普遍关注[1~2]。本文依据经典直线驻波超声电机的驱动原理,提出一种多驱动齿的新型旋转驻波超声电机,该电机振子能在预先设计的面外弯曲模态下,实现驱动齿的最佳位置匹配。
1 旋转型超声电机的振子结构
旋转型超声电机的振子结构为环形结构,设计成每隔一定角度,环形表面突出一个高度。在ANSYS中建立该振子模型,通过有限元分析计算,振子上表面的凸齿宽度影响振子的振动频率以及凸齿在振动模态中的位置,进而影响超声电机的性能。为了修正振动模态,在凸齿旁添加有一定宽度但比凸齿低的附加齿来改善振动模态,如图1所示。圆盘形振子的结构参数见表1。
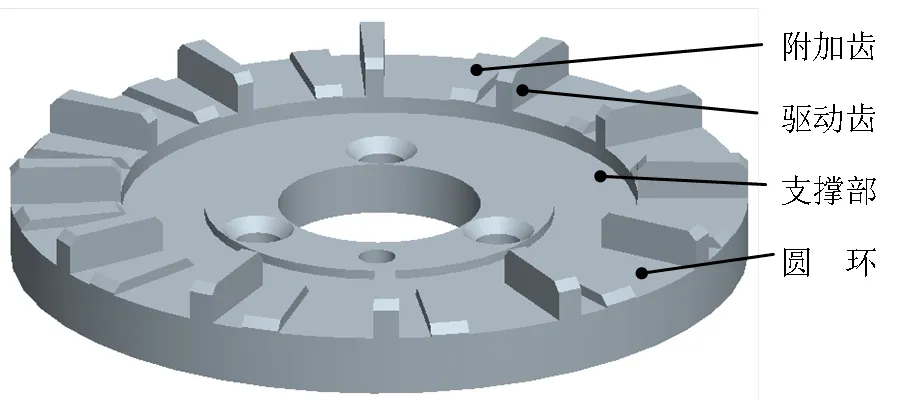
图1 带附加齿的圆盘形振子
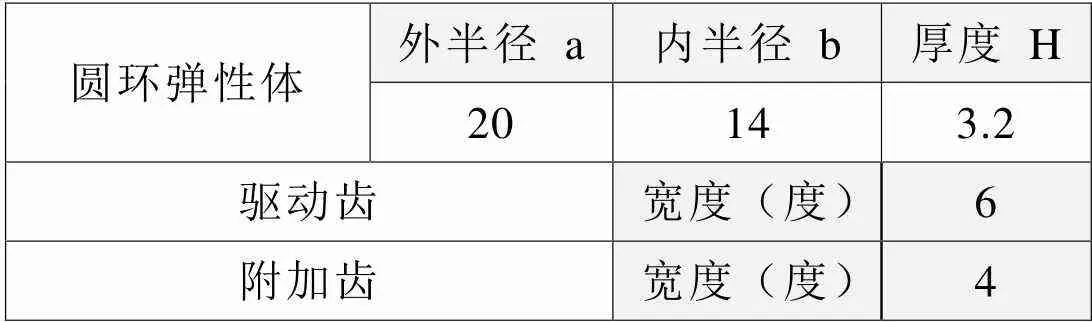
表1 圆盘形振子的结构参数(单位:mm)
根据前期数值分析,对振子选择6阶弯曲模态进行研究,对模型施加约束并进行网格划分,圆环振子在X、Y方向固定,Z方向自由,模态分析结果如图2所示。现在需要调整外径内径尺寸,找出圆环形振子在6阶弯曲模态情况下两个频率差为零的两个模态
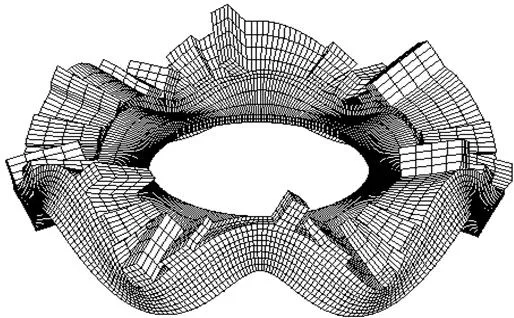
图2 圆盘形振子6阶弯曲模态图
2 圆盘形振子直径尺寸对弯曲模态的影响
依据前期研究对圆环形振子的研究大部分集中在振子厚度、圆盘内径、外径数等参数的研究。本文主要研究凸齿高、附加齿高对圆盘形振子弯曲模态的影响,分析模态一致性问题。
将圆盘形振子的内径、外径、基体的厚度、两种齿宽固定,改变两种齿的高度,在ANSYS中进行动态设计,分析时主要观察两方面变化,一是振子凸齿在Z方向的振幅,二是凸齿在振型中的位置。图3(a)~(h)给出了圆盘形振子在6阶弯曲模态下,在两种不同齿的高度时,振子的振幅(截取一部分)变化图。从图中可以看出,当凸齿高为2.1 mm,附加齿高为0.6 mm时,振子的振幅最大。此时齿的位置复合设计要求如图4所示。在其余条件下,振子振幅及凸齿所在位置不符合设计要求。
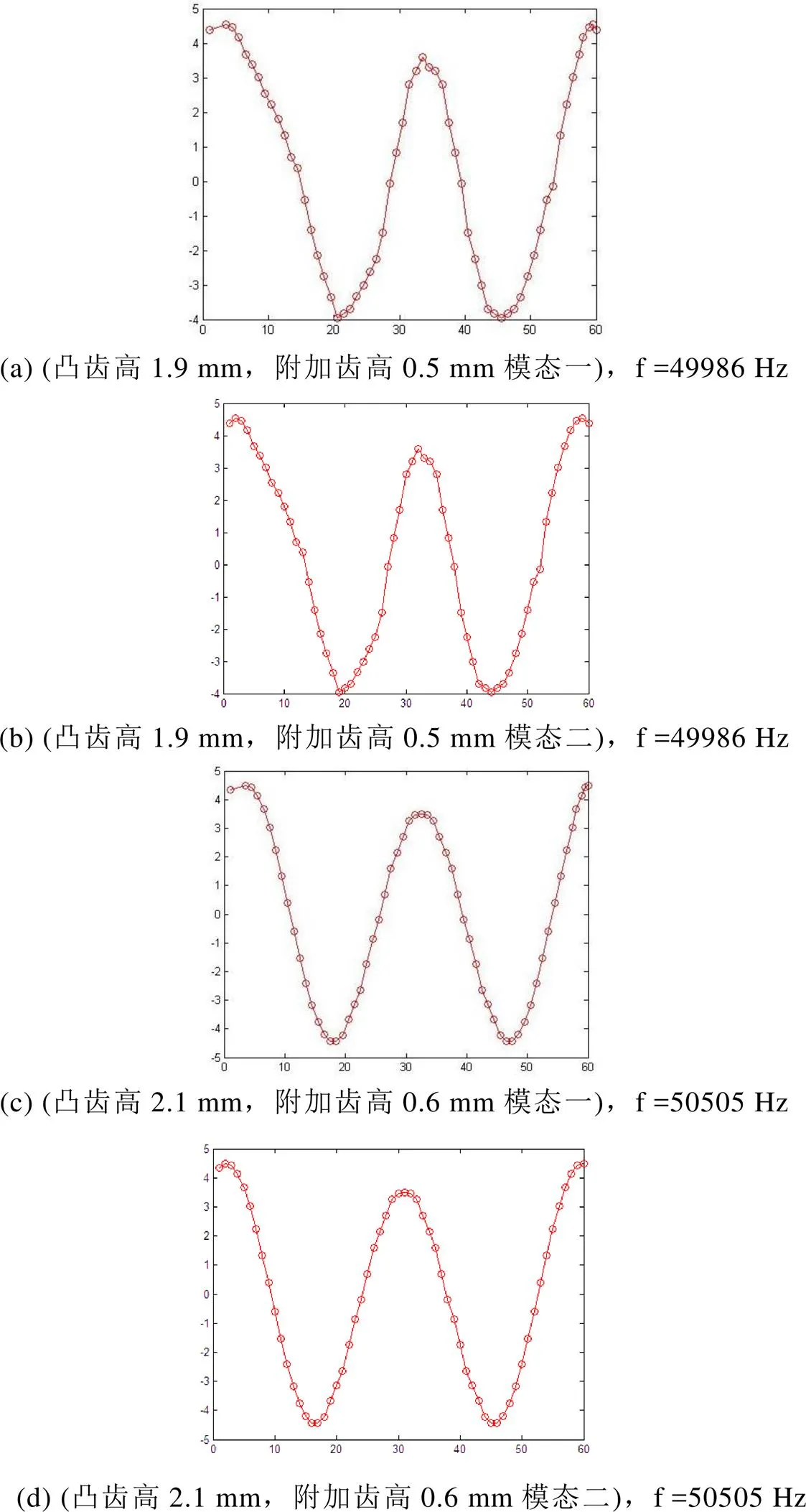
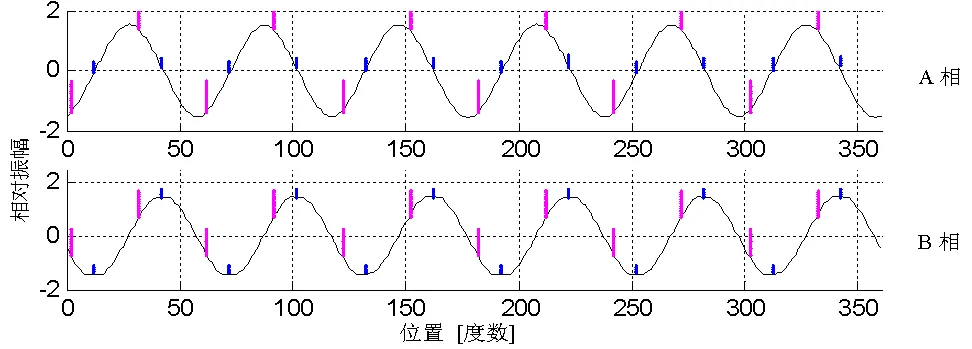
图4 带附加齿振子有限元模态分析的相对振幅分布
3 圆盘形振子的实验研究
根据模态分析的结果,按照结构参数制作了圆盘形振子的实物,如图5所示。

图5 实物照片
对旋转型驻波超声电机进行实验测试,得到电机的工作频率分别为50.50 kHz和50.60 kHz,频率差为100 Hz,与模拟分析结果相近,其差异是由制作时的误差及粘贴陶瓷片时的误差引起的。
4 结论
1)圆盘形振子的凸齿高、附加齿高对弯曲模态的频率影响较大;
2)当凸齿高为2.1 mm、附加齿高为0.6 mm时,圆盘形振子的弯曲模态复合要求,振幅最大且齿的位置最好。
[1] 胡敏强, 金龙, 顾菊平. 超声波电机原理与设计. 北京: 科学出版社, 2005.
[2] 陈永校, 郭吉丰. 超声波电动机. 浙江: 浙江大学出版社, 1994.
[3] 上羽貞行, 富川义郎著. 杨志刚, 郑学伦译. 超声波马达理论与应用. 上海: 上海科学技术出版社, 1998.
[4] S. Ueha, Y.Tomikawa. Ultrasonic motors-theory and application. Oxford science publications, 1993.
[5] K.T.Chau, B.Shi, et al. A new design method and half-step operation for ultrasonic stepping motors. IEEE Transaction on Industry Appications. 2003, 39(4): 953-960.
[6] T. Kanda, A. Makino et al. A micro ultrasonic motor using a micro-machined cylindrical bulk PZT transducer. Sensors and Actuators, A, 127, 2006: 131-138.
Research on Piezoelectric Vibrators of Rotary Ultrasonic Motors
Wang Xiaozhu,Zhang Jian
(Yingkou Institute of Technology, Yingkou 115014, Liaoning, China)
TQ51
A
1003-4862(2021)11-0006-03
2021-03-25
辽宁省自然科学基金指导计划(20180550960);辽宁省教育厅科学研究经费项目(L2019014);辽宁省自然科学基金联合基金计划项目(2020-YKLH-28);
王笑竹(1982-),女,硕士,副教授,研究方向:超声电机与机械设计的研究。
张健(1981-),男,博士,副教授,研究方向:电力电子与电力传动、电机控制。E-mail: 330608566@qq.com
