刚性共轴双旋翼动平衡调整方法研究
2021-11-11唐虎生黄安
唐虎生,黄安
中国直升机设计研究所
无人直升机桨叶的加工误差和气动干扰会引起较大振动响应,刚性共轴双旋翼无人直升机气动载荷复杂,振动响应大,其动平衡调整是一项十分重要的工作。本文参考常规构型动平衡调整方法,对刚性共轴双旋翼无人直升机动平衡调整进行研究,根据双旋翼气动特性,采用试重法,简化双旋翼配重加载方式,可在地面简便快捷地调整旋翼动平衡。
无人直升机旋翼系统是升力的来源,也是无人直升机振动的主要来源之一,无人直升机特殊的飞行模式虽具有优良飞行性能,但也一直被振动问题困扰。降低无人直升机振动并提高其飞行品质,是新型无人直升机研制的重难点。由于加工误差和气动干扰,旋翼系统工作时,各桨叶离心力和气动载荷力不相等因素会使旋翼系统产生较大振动。刚性共轴双旋翼由相反旋转的上、下两副刚性旋翼构成,具有体积小,结构紧凑,翼面载荷小,且无人直升机能以较高的速度前行等优点。但刚性共轴双旋翼无人直升机的上下旋翼之间、旋翼与机体之间产生的严重气动干扰,与常规构型无人直升机截然不同,刚性共轴双旋翼转速快,气动载荷复杂,旋翼系统产生的振动载荷更大,更需要对旋翼系统进行动平衡调整。本文参考常规构型无人直升机动平衡调整方法,对刚性共轴双旋翼动平衡调整进行研究。
无人直升机主要通过桨距调节升力和飞行速度,旋翼的旋转速率是定值,每片桨叶的气动载荷是一个相位不同、周期相同的周期函数,各桨叶的载荷在桨毂叠加后引起的振动频率是定值。旋翼动平衡调整目标是,将旋翼系统传到机身结构上的NΩ交变载荷抵消掉(N为桨叶片数,Ω代表额定旋翼转速),使无人直升机三个方向的1Ω振动降到设计要求水平。
无人直升机桨叶调整参数与机体振动值是线性映射关系,基于此原理其他研究人员提出基于阶次跟踪、基于GRNN神经网格模型方法、追踪最优化网格方法,对无人直升机旋翼动平衡进行调整。但这些方法需要已知数据构建数学模型,不适用新型无人直升机研制中的地面联合试验。共轴双旋翼系统的振动大且调平复杂,本文基于刚性共轴双旋翼无人直升机地面动平衡调整工程实践,提出一种系统且全面的双旋翼动平衡调整方法。
旋翼动平衡调整方法
旋翼动平衡调整的核心是通过改变桨叶参数,弥补桨叶加工误差,使旋翼系统工作状态重新得到平衡,或通过产生一个与原有振动方向相反、振动值大小相同的振动,以抵消一部分原有的振动。目前主要通过调整桨叶离心力或气动力来调整。
桨叶离心力调整主要是在桨叶根部增加或减少配重,重新调整桨叶的质量分布,使桨叶质量分布变化引起的振动来抵消原先的振动。
桨叶气动力调整主要是调节变距拉杆和桨叶后缘调整片,变距拉杆可以改变桨叶的桨距,桨距变化直接影响桨叶的升力,改变桨距对桨叶的气动载荷影响最大,是旋翼动平衡调整方法中能发挥最大调节作用的方式;改变桨叶气动力还可以通过调整桨叶后缘片的弯曲来改变桨叶局部气动特性,改变桨叶气动力会使旋翼系统的升力函数发生改变,在新型无人直升机研制试验时,可能导致后续旋翼升力数据的偏差。
刚性共轴双旋翼由上下旋转方向相反的两组旋翼系统组成,两组旋翼产生的不平衡扭矩可以互相抵消,如采用改变气动力来调整旋翼系统的动平衡,共轴刚性双旋翼需要同时改变两组相对应的桨叶气动载荷,找出两组相对应旋翼的工作复杂性,不适用试验现场。改变桨叶质量分布调整刚性共轴双旋翼系统的动平衡最合适,本次刚性共轴双旋翼的动平衡调整选用试重法。试重法可在无任何初始数据条件下,利用矢量相加的方法,对一次初始无配重下振动数据和一次试配重后的振动数据进行分析,得出满足旋翼动平衡要求的下一次加载重量及加载点。
动平衡检查
旋翼动平衡测量调整是在额定转速状态下进行,为降低动平衡调整对其他系统寿命的影响,加快试验现场工作进度,有效提出旋翼系统调整的建议,减少动平衡调整开车次数,需要旋翼系统振动响应值数据作为依据,因此需要对旋翼系统的动平衡振动响应进行快速检查。
动平衡设备
动平衡检查设备为XZD-5旋翼锥体与动平仪,该型动平衡仪可以测得动平衡的幅值和相位,广泛应用于各机型地面、空中旋翼系统的动平衡调整。
XZD-5旋翼锥体与动平仪由主机、手持仪、振动传感器、光电转速传感器、线缆和反光纸等组成。
动平衡设备安装
将振动传感器安装在主减速器上,位置靠近旋翼轴,方向为Y方向;光电传感器安装在机身上,方向垂直于旋翼面,在光电传感器正上方的下旋翼黄色基准桨叶下表面,贴上反光纸。光电传感器是一个旋翼实际转速采集传感器,光电传感器向桨叶的反光纸发送脉冲信号,反光纸每经过一次光电传感器,光电传感器将接受一次信号,即可得知旋翼转速。
动平衡调整步骤
在调试现场,采用试重法可以快速粗略地将旋翼系统的振动响应调至满足设计要求,该型刚性共轴双旋翼要求Y方向振动值小于0.2IPS,进行动平衡检查与计算,可以忽略影响较小的参数,忽略桨叶厚度,将桨叶视为一个无厚度的平面,并做出两种假设:第一,在同一桨叶上加载配重,改变的动平衡幅值与质量成正比,相位不变;第二、在各桨叶加载相同质量,改变的动平衡振动响应幅值均相同。无人直升机旋翼系统动平衡地面现场调试步骤如下。
第一,测量无配重当前状态下动平衡幅值和相位,并在预先备好的动平衡调整图即图1中绘出该动平衡状态点;

图1 动平衡调整图,图上的数字为时间。
第二,试配重。选择一个基准桨叶,在桨叶根部加载一个试配重块,测量动平衡值,并在动平衡图中绘出其状态点;
第三,连接两状态点,其连线矢量方向即是基准桨叶方向,旋转桨叶,将其与该矢量方向平行,得到各桨叶与坐标轴的相对位置,绘出各桨叶加载坐标图,该坐标图即为初步动平衡图;
第四,根据平衡振动矢量和坐标轴的相对角度关系,找到合适加载支臂。具体配重质量根据质量与振动幅值的比例关系计算确定,如一次不成功,根据最新数据进一步修正,直到使动平衡向圆心靠近,到达设计要求。

图2 动平衡调整流程图。
刚性共轴双旋翼动平衡调整
本次刚性共轴双旋翼动平衡调整选择在刚性共轴双旋翼无人直升机地面联合试验台上进行,刚性共轴双旋翼无人直升机旋翼图,如图3所示,上下旋翼桨叶标定及旋转方向如图4、5。设计任务要求旋翼系统动平衡振动响应值在Y方向上为IPS<0.2。

图3 刚性共轴双旋翼示意图。

图4 下旋翼桨叶示意图。
调整前准备
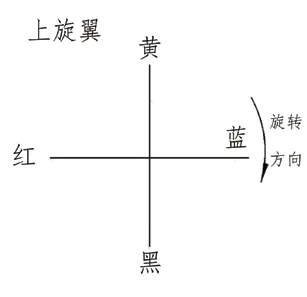
图5 上旋翼桨叶示意图。
在桨叶翼跟下方的机身支架上安装振动传感器,用于测量旋翼系统1Ω水平方向即Y方向的振动值,该传感器的安装位置严格垂直于旋翼旋转平面。在黄色基准桨叶翼跟的下表面安装反光片,在机身预留传感器支架上安装带支座的光电传感器,光电传感器射出的光束指向反光片,振动传感器和光电传感器通过数据线与远处的动平衡分析仪相连接,以上装置可测量出旋翼转速及该转速下的动平衡振动值及相位。调整前需要对光电传感器和动平衡分析仪进行校准与状态确认。
动平衡调整
动平衡调整开始,旋翼系统首次地面开车检查,初始动平衡振幅为0.3IPS@9:00,即为动平衡图上的A点,不满足动平衡振动幅值小于0.2IPS的设计要求。刚性共轴双旋翼无人机直升机的最大振动源来自上旋翼振动,为减少动平衡调整影响参数,本次动平衡调整只在上旋翼加配重。选择在上旋翼黄色桨叶试加321.9g配重,开车后检查结果为0.75IPS@8:08,见图6中的B点方向代表黄色桨叶加载方向,将旋翼系统顺时针旋转,黄色桨叶与平行,动平衡图中旋转后的桨叶t与坐标轴相对位置如图6所示。|AB|线段长度代表试重后振动变化的幅值,约为35.83mm,对应质量为321.9g。由动平衡图的结果分析可知,如果要实现旋翼系统振动值小于0.2IPS的动平衡调整目标,需要将黄桨试配重去掉,再根据前两次动平衡结果计算出配重加载重量及加载点。如图6所示,
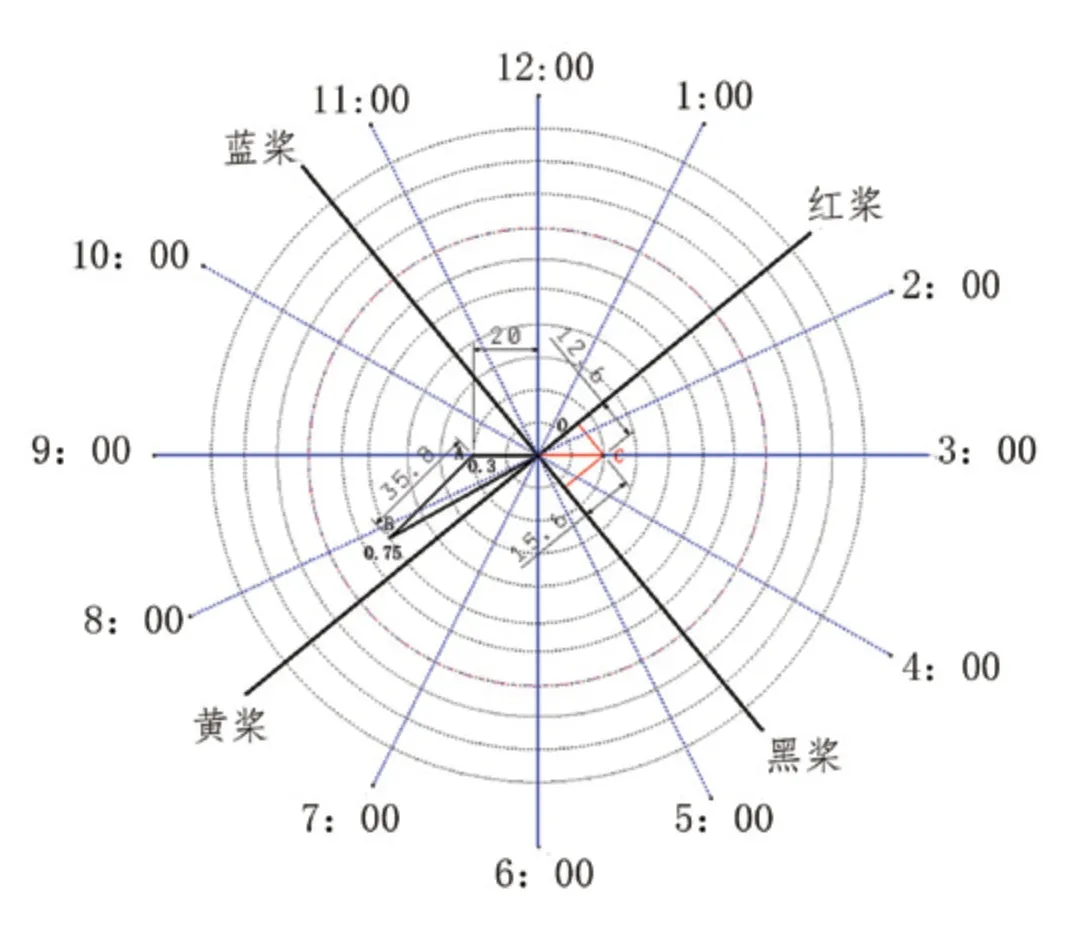
图6 动平衡调整结果图。

计算得出,
要想将动平衡点落在O点,需要在上旋翼红桨上加载113.3g,黑桨上加载140.3g,在无人直升机旋翼系统动平衡调整时,尽量只在一片桨叶上增加配重或在两片桨叶上增加相同重量的配重,便于在调整现场快速利用动平衡图简单计算出配重与振动数值变化的对应关系,并方便判断矢量图的方向,受限于调整现场单个配重片质量,因此在红桨及黑桨各加152.3g的配重。加载后,实测动平衡值为0.05IPS@11:56,满足振动值小于0.2IPS的设计要求,刚性共轴双旋翼无人直升机动平衡调整完成。
总结
刚性共轴双旋翼无人直升机气动载荷复杂,振动响应大,其动平衡调整是一项十分重要的工作。本文参考常规构型动平衡调整方法,对刚性共轴双旋翼无人直升机动平衡调整进行探索研究,根据双旋翼气动特性,简化双旋翼配重加载方式,调整结果满足设计要求。
调整结果显示,刚性共轴双旋翼无人直升机的动平衡调整原理与常规构型类似,采用试重法,通过现场简单工具计算,在极少的开车次数下即可将动平衡振动响应值调整至设计要求,具有准确性、快速性及良好的通用性。
该方法可以适用于其他相似构型的无人直升机动平衡调整。虽刚性共轴双旋翼无人直升机动平衡调整影响因素众多,但只需对影响最大的参数进行调整,即可满足动平衡设计要求。动平衡调整原理简单,但计算复杂,如果将其数学模型简化,内置于动平衡分析仪中,可以利用动平衡分析仪存储数据,自动计算下一次动平衡试验所需加载配重重量值及加载点,简化动平衡调整对工作人员的要求,降低用户维护难度,应用于无人直升机大规模应用场景的维护。
