实现正方形区域高覆盖的洗碗机喷臂运行轨迹探究
2021-11-09黎铭峰徐术荣王豪杰
黎铭峰 徐术荣 王豪杰
华帝股份有限公司 广东中山 528415
1 引言
家用洗碗机(以下简称洗碗机)是代替人工清洗餐具的家电产品,这一新兴厨电产品近年来正以持续的高速在国内普及,尽管2020年新冠肺炎疫情对各行各业造成了不同程度的冲击,洗碗机在健康需求的助力下仍然保持着良好的增长态势[1]。对国内洗碗机生产者来说,洗碗机市场已进入快速成长期,虽然20多年的生产经验已使我国洗碗机质量达到一个较高的水平,但未来的重心必将转为质量竞争[2]。并且,洗碗机质量的评判将越来越多地面向国内用户,调查显示他们聚焦在“更干净”、“更快速”、“更健康”等核心关注点[3],这将推动洗碗机持续的技术发展和产品迭代升级。
洗碗机是通过内部喷臂的旋转喷淋,对餐具进行喷射,同时结合水的反射、溅洒和冲淌等作用,完成对餐具的清洗。研究分析表明,洗净效果主要来源于水流的机械冲洗作用、洗涤剂的化学作用和热水的溶解以及热冲击作用[4],但对于水流喷射不到的位置,上述作用将无法进行或没有充分进行,这些位置的洗净效果就会明显下降。
对大部分洗碗机来说,内部洗涤区域在俯视角度下呈接近正方形的形状,如图1所示。而普遍采用的旋转喷臂,其绕中心轴水平旋转,形成圆形的覆盖区域,这和正方形洗涤区域不匹配,尤其是四个角的位置,喷射水柱难以直接射到,只能依靠有限的水的反射和溅洒对餐具形成清洗,因此大概率会洗涤不充分,从而降低洗碗机的整体洗净性能。由于覆盖性不足的问题,只能通过延长洗涤时间去提升洗涤不充分区域的洗净效果,这又与用户的“更快速”需求相违背。
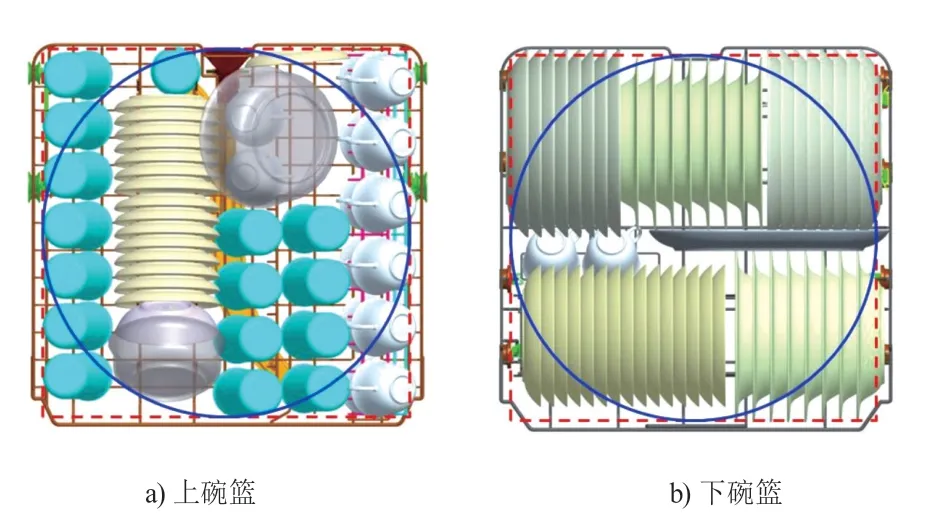
图1 洗碗机上下碗篮的正方形洗涤区域示意图
为了提升洗净性能,Electrolux公司最早开发了卫星喷臂技术[5],在单转型主体喷臂端部增设卫星喷臂。随着主体喷臂水平旋转,卫星喷臂一边公转一边自转,喷射孔形成非固定的运行轨迹。2016年,国内进一步开发了绕水平轴滚转的卫星喷臂技术[6],增加了喷射角度的多样性。卫星喷臂的加入大大提升了洗涤均匀性,但并不能使喷臂伸长,否则会触碰内胆,因此喷臂覆盖的还是原来的圆形区域。
在此基础上,Whirlpool公司提出了卫星喷臂特定轨迹技术[7],具体是加入齿轮传动机构去控制卫星喷臂的运行,使得卫星喷臂上的喷射孔按照扁长椭圆轨迹去运行,并且椭圆长轴方向对准正方形的两个对角线,因此卫星喷臂在正方形四个角的位置可以超出原来的圆形区,从而真正做到了增加覆盖区域。
之后,美的公司将卫星喷臂特定轨迹技术用于解决45机长方形洗涤区域的覆盖难题,提出了长方形覆盖技术[8],构造新的齿轮传动机构,使卫星喷臂上的喷射孔走出一种新的轨迹——肾形线,更好匹配长方形形状;另一侧的卫星喷臂保留对应长方形对角线方向的椭圆线轨迹,两者复合能将覆盖率从原来的61%大幅提高到89%。
综上所述,含齿轮传动机构的卫星喷臂能够形成特定的运行轨迹,目前椭圆轨迹线和肾形轨迹线已应用,本文将对特定轨迹作进一步的深入挖掘和延伸研究。
2 卫星喷臂的特定运行轨迹设计
用齿轮传动机构去控制卫星喷臂的运行轨迹,其数学原型是特定的传动级数和齿数比形成特定的公转自转转速比,从而形成特殊的数学曲线作为卫星喷臂上的点的运行轨迹。
下文的各个数学公式中,如无特殊说明,x和y代表轨迹线上的点的横坐标和纵坐标,α为卫星喷臂公转转过的角度,也是喷臂主体转过的角度;M为卫星喷臂自转中心O'和公转中心O的距离,即偏心距;N为卫星喷臂上喷射孔到卫星喷臂自转中心O'的距离。
2.1 椭圆线
采用3个齿轮构成的两级传动机构,太阳轮固定,喷臂主体作为行星架,卫星喷臂与外侧的末端行星轮固连,太阳轮与末端行星轮的齿数比为2:1,此时卫星喷臂的公转自转转速比为-1:1,方向相反,卫星喷臂上喷射孔的运行轨迹满足如下参数方程:
图2a)所示为卫星喷臂上同一侧五个喷射孔的椭圆轨迹线,各个椭圆的长半轴长度为|M+N|,短半轴长度为|M-N|。对于N>M的两个喷射孔,轨迹线标记为黑色,随着N减小,椭圆逐渐整体内缩;直到N=M时,椭圆压缩成一条直线,轨迹线标记为红色;对于N<M的两个喷射孔,轨迹线标记为绿色,可以看出N越接近M,椭圆的形状越扁平。
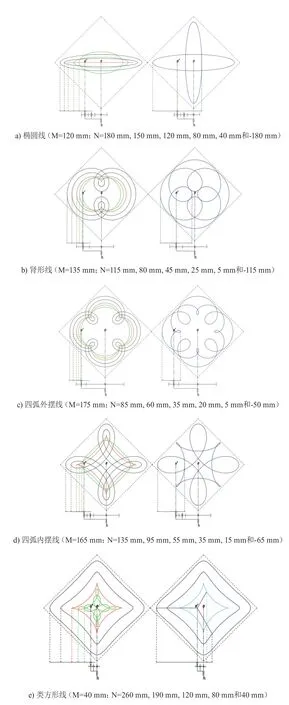
图2 几种可作为卫星喷臂运行轨迹的特殊数学曲线
此外,定义长轴方向为椭圆线的方向,两条椭圆轨的相位差等于两个喷射孔到卫星喷臂转轴连线之间夹角的1/2,如果两条椭圆线对准正方形的两条对角线,相位差为90°,两个喷射孔就要分设在卫星喷臂的两侧。
2.2 肾形线
采用2个齿轮构成的一级传动机构,固定的太阳轮与固连卫星喷臂的行星轮的齿数比为2:1,此时卫星喷臂的公转自转转速比为3:1,方向相同,卫星喷臂上喷射孔的运行轨迹满足如下参数方程:
图2b)所示为卫星喷臂上同一侧五个喷射孔的双弧外摆轨迹线,即肾形线。对于N>M/3的两个喷射孔,轨迹线标记为黑色,有相对的两个外摆花瓣,并且在中间轨迹线交叉形成两个内绕圈,随着N减小,外摆花瓣和内绕圈都逐渐内缩;直到N=M/3时,两个内绕圈缩成两个尖角,呈“8”字形,轨迹线标记为红色;对于N<M/3的喷射孔,轨迹线标记为绿色,可以看出随着N减小,外摆花瓣继续内缩,而两个尖角变为内凹,并逐渐往外扩。
此外,定义两个外摆花瓣的方向为肾形线的方向,两条肾形线的相位差,等于两个喷射孔到卫星喷臂转轴连线之间夹角的1/2,如果两条肾形线对准正方形的两条对角线,相位差为90°,两个喷射孔也是分设在卫星喷臂的两侧。
2.3 四弧外摆线
采用2个或4个齿轮构成的传动机构,固定的太阳轮与固连卫星喷臂的行星轮的齿数比为4:1,此时卫星喷臂的公转自转转速比为5:1,方向相同,卫星喷臂上喷射孔的运行轨迹满足如下参数方程:
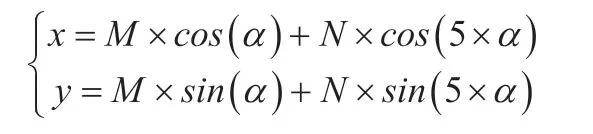
图2c)所示为卫星喷臂上同一侧五个喷射孔的四弧外摆线的轨迹线。对于N>M/5的两个喷射孔,轨迹线标记为黑色,有均布的四个外摆花瓣,在相邻两个花瓣的中间轨迹线交叉形成四个内绕圈,随着N减小,外摆花瓣和内绕圈都逐渐内缩;直到N=M/5时,四个内绕圈缩成四个尖角,轨迹线标记为红色;对于N<M/5的喷射孔,轨迹线标记为绿色,可以看出随着N减小,外摆花瓣继续内缩,而四个尖角变为内凹,并逐渐往外扩。
此外,两条四弧外摆线的相位差,等于两个喷射孔到卫星喷臂转轴连线之间夹角的1/4,如果两个喷射孔分设在卫星喷臂的两侧,形成的两条轨迹线的相位差就是45°,如果卫星喷臂一侧喷射孔形成的四弧外摆线的四个外摆花瓣对准正方形的四个角,另一侧喷射孔形成的四弧外摆线的四个外摆花瓣则对准正方形四条边的中点。
2.4 四弧内摆线
采用3个齿轮构成的两级传动机构,固定的太阳轮与固连卫星喷臂的行星轮的齿数比为4:1,此时卫星喷臂的公转自转转速比为-3:1,方向相反,卫星喷臂上喷射孔的运行轨迹满足如下参数方程:
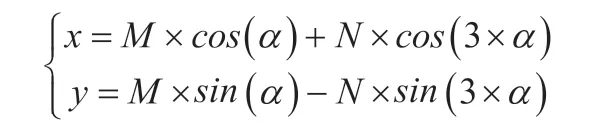
图2d)所示为卫星喷臂上同一侧五个喷射孔的四弧内摆线的轨迹线。对于N>M/3的两个喷射孔,轨迹线标记为黑色,有均布的四个外绕圈,中心围成一个四边内凹的类方形,随着N减小,外绕圈逐渐内缩,类方形逐渐外扩;直到N=M/3时,四个外绕圈缩成四个尖角,轨迹线标记为红色;对于N<M/3的喷射孔,轨迹线标记为绿色,可以看出随着N减小,类方形的四边内凹逐渐外扩,同时四个尖角变为外凸,并逐渐往内缩。
此外,两条四弧内摆线的相位差,等于两个喷射孔到卫星喷臂转轴连线之间夹角的1/4,如果两个喷射孔分设在卫星喷臂的两侧,形成的两条轨迹线的相位差就是45°,如果卫星喷臂一侧喷射孔形成的四弧外摆线的四个外绕圈对准正方形的四个角,另一侧喷射孔形成的四弧外摆线的四个外绕圈则对准正方形四条边的中点。
2.5 类方形线
采用3个齿轮构成的两级传动机构,固定的太阳轮与固连卫星喷臂的行星轮的齿数比为4:3,此时卫星喷臂的公转自转转速比为-1:3,方向相反,卫星喷臂上喷射孔的运行轨迹满足如下参数方程:
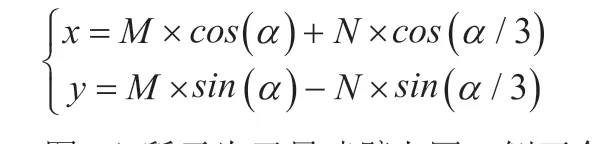
图2e)所示为卫星喷臂上同一侧五个喷射孔形成的四边内凹的类方形线。对于N>3M的类方形线,标记为黑色,随着N减小,图形整体内缩,并且四边内凹逐渐加大,四个角逐渐变得尖锐;直到N=3M时,四个角刚好形成四个尖角,轨迹线标记为红色;对于N<3M的类方形线,标记为绿色,可看出四个角形成外绕圈,并逐渐增大。
此外,两个类方形线的相位差角度,等于两个喷射孔到卫星喷臂转轴连线之间夹角的3/4。如果卫星喷臂均布三个喷臂翼,两个喷臂翼的喷射孔之间相位差就是120°,此时两种喷射孔的轨迹线相位差为90°,三组喷射孔叠加刚好形成一系列同心轨迹线。
3 正方形区域的覆盖方案设计和比较
下面就480 mm×480 mm的正方形碗篮区域的覆盖提升设计了不同方案,如图3所示。覆盖时各种曲线的最外端都与正方形边沿留下10 mm间隙,一方面是喷臂内部结构所限,喷射孔无法做到太靠外,另一方面是避免喷臂外端在旋转过程中碰到内胆导轨、内水管或碗篮滚轮等零部件,因此喷臂喷射覆盖率最大值设为4602/4802≈91.84%。

图3 以特定数学曲线去覆盖正方形的不同技术方案
3.1 圆形覆盖
采用单转型喷臂去覆盖,如图3a)所示,喷臂上从中心向外均布12个喷射孔,形成一系列同心圆轨迹线,最大圆直径即为460 mm,图中标注为红色。喷臂对正方形的覆盖率计算为72.10%,在四个角的位置形成明显的空白区。
3.2 椭圆叠加覆盖
采用椭圆线卫星喷臂,卫星喷臂偏心距M设为180 mm,开有12个喷射孔,将形成一系列椭圆线,如图3b)所示。其中,对准正方形两条对角线的椭圆线(绿色)较为扁长,对准正方形的两条中垂线的椭圆线(红色)较为宽胖,并且这四条对称线上都设置有两个喷射孔。此方案下,喷臂对正方形的覆盖率计算为84.50%。
实际设计时分成两个椭圆线卫星喷臂,分设在喷臂主体的两侧,12个喷射孔分设在两个卫星喷臂上,如图4所示,这样可以使喷臂整体更加平衡协调。
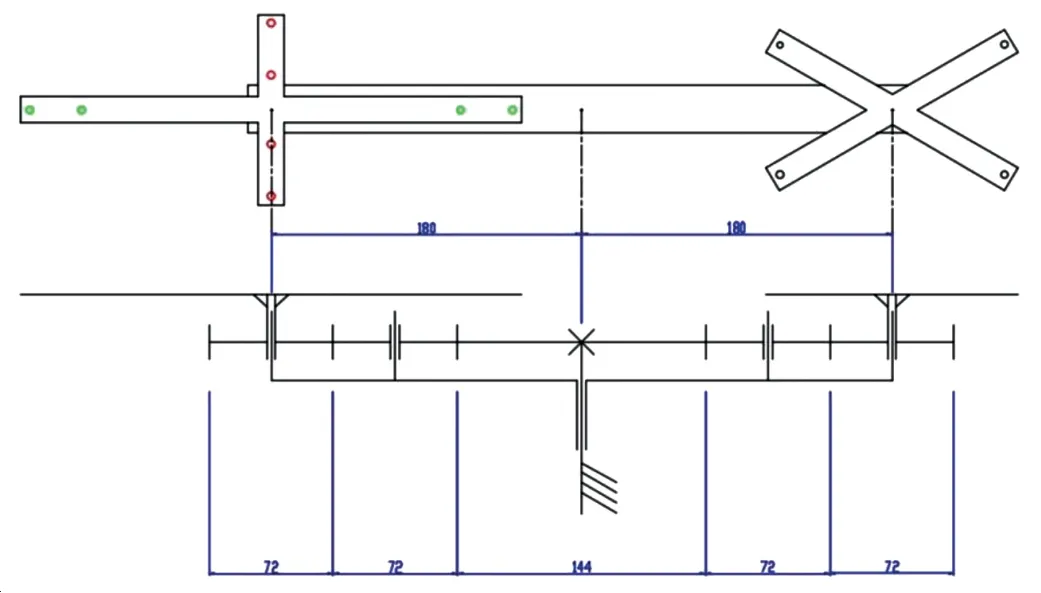
图4 椭圆线覆盖方案的喷臂设计示意图
3.3 肾形线覆盖
采用肾形线卫星喷臂,卫星喷臂偏心距M设为120 mm,两侧各开6个喷射孔,总共12个喷射孔。如图3c)所示,12个喷射孔将形成两组肾形线(红色和黑色),相位差90°,分别对准两条对角线,此方案下覆盖率计算为77.85%。
从图3c)可以看到,虽然覆盖率有所增加,但是没能覆盖四角区域。为此,在主体喷臂另一侧增设一个具有4个喷射孔的椭圆线卫星喷臂,肾形线卫星喷臂喷射孔减为8个,这可以进一步实现对四角区域的覆盖,如图3d)所示,叠加椭圆线(绿色)后,覆盖率提高到87.56%。实际设计时两侧的卫星喷臂共用中心的太阳轮,椭圆线卫星喷臂偏心距M设为200 mm,由两级齿轮机构连接,如图5所示。
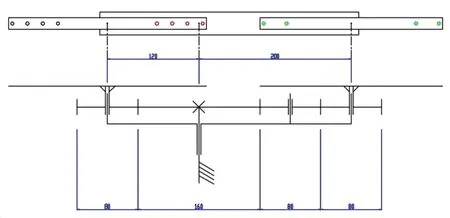
图5 “肾形线+椭圆线”复合覆盖方案的喷臂设计示意图
3.4 四弧外摆线覆盖
采用四弧外摆线卫星喷臂,卫星喷臂偏心距M设为130 mm,一侧开7个喷射孔,另一侧开5个喷射孔,总共12个喷射孔。如图3e)所示,12个喷射孔将形成两组四弧外摆线(红色和黑色),相位差45°,其中较大的一组的四个花瓣对准正方形四个角,另一组的四个花瓣对准正方形四条边的中点,此方案下覆盖率计算为80.10%。
从图3e)可以看到,覆盖率有了较大增加,正方形四角覆盖得到一定改善。如果将图5的椭圆线卫星喷臂加到主体喷臂的另一侧,四弧外摆线卫星喷臂减为8个喷射孔,从而构成图6的喷臂,覆盖情形如图3f)所示,叠加椭圆线(绿色)后,覆盖率可以提高到88.65%。
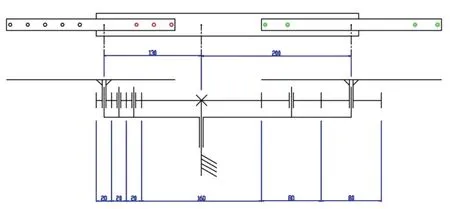
图6 “四弧外摆线+椭圆线”复合覆盖方案的喷臂设计示意图
3.5 四弧内摆线覆盖
采用四弧内摆线卫星喷臂,卫星喷臂偏心距M设为165 mm,开有12个喷射孔,分成4组。如图3g)所示,5个喷射孔画出一组四弧内摆线(红色)去覆盖正方形的大部分区域,包括四个角位置和中心区域,其余7个喷射孔根据到自转中心距离的不同分成“2+2+3”的三组,三组轨迹线补充覆盖剩余区域,此方案下覆盖率计算为74.22%。
从图3g)可以看到,覆盖率比圆形覆盖稍有提高,这是因为四角区域虽然得到了很好覆盖,但是空白区转为分布在正方形四个边的中间位置。为此,如果将4个喷射孔调整到主体喷臂的另一侧,形成4个圆形轨迹线(绿色),从而构成图7的喷臂,覆盖情形如图3h)所示,此时喷臂的总体覆盖率能够达到85.53%。
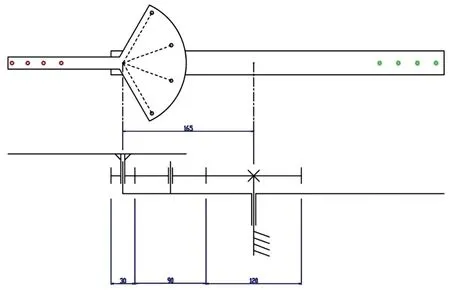
图7 “四弧内摆线+同心圆”复合覆盖方案的喷臂设计示意图
3.6 类方形线覆盖
采用类方形线卫星喷臂,卫星喷臂偏心距M设为40 mm,均布地伸出三个喷臂翼,两两夹角120°,每个喷臂翼上各开4个喷射孔,总共12个喷射孔,N值各不相同。此时,三组喷射孔形成的三组类方形轨迹线的相位差为90°,所以12个喷射孔将共同形成一组同心同向的类方形轨迹线,能够接近完全地覆盖正方形区域,如图3i)所示。此技术方案下,喷臂对正方形的覆盖率计算为89.21%。
3.7 方案比较
如表1所列,采用不同的特定轨迹卫星喷臂技术方案后,覆盖率有2.6%~17.6%的增幅。尤其是类方形线卫星喷臂方案,覆盖率可达89.21%,已经接近理论最大值91.84%。另一方面,采用两种曲线复合的喷臂方案,也可获得很好的覆盖效果,覆盖率达到85%以上。实际上,对于覆盖率85%以上的方案,如果进一步考虑水的反射和溅洒作用,基本可等同于对正方形区域的完全覆盖了。
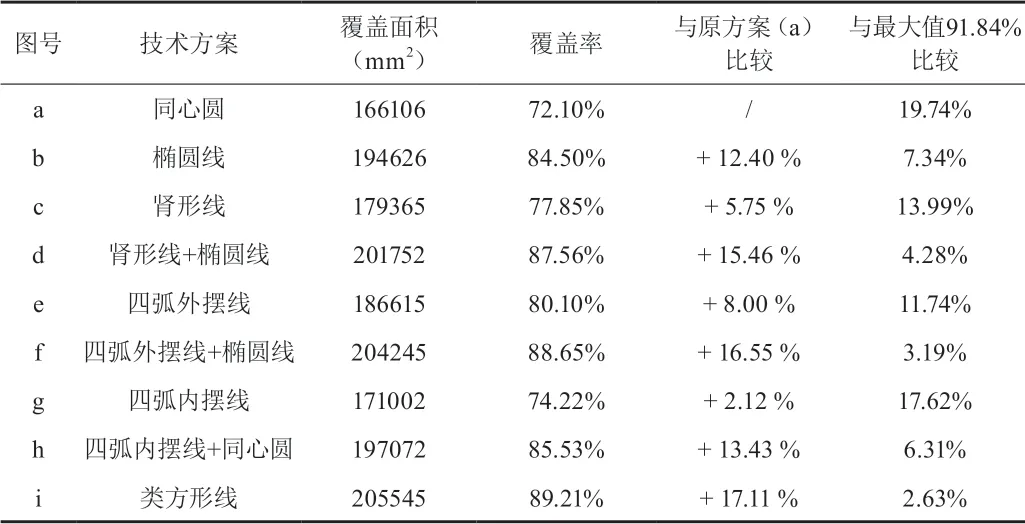
表1 不同喷臂方案的覆盖效果比较
4 结论
本文针对正方形洗涤区域四角覆盖不良的洗碗机行业难题,以60机为例进行研究,提出椭圆线、肾形线、四弧外摆线、四弧外摆线和类方形线等特殊数学曲线作为卫星喷臂的运行轨迹,实现了对正方形区域的高覆盖甚至全覆盖。通过对不同喷臂方案的详细阐述和分析比较,采用类方形线方案和三个两种曲线复合的覆盖方案,覆盖率可达到85%以上,较之圆形覆盖有了大幅提升,大大提高洗碗机的整体洗净能力。此外,本文还给出了卫星喷臂设计的参数建议和机构示意图,这对于喷臂的创新设计具有很好的指导意义。
