水下模拟失重试验模型设施发展综述
2021-11-09马爱军刘伟波
韩 旭,石 蒙,董 睿,马爱军,张 磊,刘伟波
(中国航天员科研训练中心,北京 100094)
0 引言
水下中性浮力模拟是模拟空间失重状态的一种有效形式。与失重飞机等方式相比,水下模拟失重试验具有试验时间长,效费比高,能够进行大型设备试验等优势。尤其是在载人航天工程中,通过水下模拟失重试验可以确定空间航天器的硬件设计是否合理,出舱活动支持能力是否满足要求;工程设计部门可以及早发现出舱活动支持硬件初样设计中的不足之处,以改进设计,确定技术状态;出舱任务、出舱程序和方案甚至交会对接等空间任务的可行性也可以在水下平台上进行验证。
水下试验模型是水下模拟失重试验设施的重要组成部分,主要用来在水下构建一个与空间飞行器外形及操作界面类似的水下模型,模拟空间中飞行器的占位、操作界面及操作力等。迄今为止,国外对此类设备开展的研究和建设活动主要集中在美俄两国。本文对两国水下试验模型的发展历程及我国类似设施的研制现状进行调研,以期为我国后续类似设备的发展梳理总结可借鉴的经验。
1 水下试验模型的组成及特点
水下试验模型主要包括2 部分:一是有出舱作业需求的空间飞行器水下模型,如空间实验室或空间站、飞船的水下模型及配套设备等;二是具有舱外活动支持能力的设备,如以空间机械臂功能为基础建造的水下机械臂等,其在功能上具备独立性。
水下模型根据试验需求,一般有以下特点:1)外形上能够构建整体或部分空间飞行器的表面轮廓;2)功能上能够实现操作机构或操作界面的模拟;3)按照模拟需求对设备的逼真度进行合理设计;4)环境适应性上能够实现水下模拟中性浮力操作,能够与水体环境在防腐、润滑等方面兼容。
2 飞行器水下模型的发展及现状
美/俄在早期空间实验室及现在的空间站阶段都建造了相应飞行器或舱段的水下模型用于试验验证和训练,部分空间飞行器的维修也在水下进行了相关的试验和训练。
2.1 俄罗斯飞行器水下模型
俄罗斯加加林航天员中心水下实验室(Hydrolab)现有国际空间站服务舱的水下模型,见图1。该舱包括多个分段,每段采用支架支撑,通过拼接形成整舱的外形。模型底座由金属杆组成,支架上有转舱滚轮,每个分段上都有转舱轨道,滚轮与轨道配合使用可使舱段沿轴线旋转,以方便将支架下方的作业面调整至适合作业的位置。

图1 国际空间站服务舱水下模型Fig. 1 Underwater model of ISS’s service module
水下实验室所用的部分手动工具见图2,主要有各种钳子、锤子和凿子等,工具手柄上一般有系绳防止掉落。

图2 加加林航天员中心水槽水下工具模型Fig. 2 Models of underwater tools in Gagarin Astronaut Center
2.2 美国飞行器水下模型
美国典型的水下试验与训练设施包括中性浮力模拟器(Neutral Buoyancy Simulator, NBS)与中性浮力实验室(Neutral Buoyancy Laboratory, NBL)。天空实验室(Skylab)任务的水下试验与训练均在中性浮力模拟器中完成,国际空间站任务的相关水下试验与训练在中性浮力实验室中进行,哈勃太空望远镜维修任务的相关水下试验与训练在这2 个设施中均有实施。
2.2.1 天空实验室水下模型
天空实验室任务的水下试验和训练项目包括出入气闸舱、舱外维修及物品转移等。根据试验需求,天空实验室水下模型(见图3)的逼真度分4级—A(飞行类)、B(仅功能性)、C(仅物理性)和D(仅包络线):大部分水下模型的逼真度为B,非出舱活动硬件的逼真度通常为D,出舱门和闭锁机构的逼真度为A,气闸舱控制面板和阿波罗望远镜模块所有控制开关的逼真度均为C。

图3 中性浮力模拟器中的天空实验室模型Fig. 3 The Skylab mockups in NBS
天空实验室水下模型在材料选择方面获得了不少有意义的经验:在应用中不锈钢是唯一不受水腐蚀影响的金属材料;在铝材方面,实心铝材比丝网耐腐蚀,虽然其牺牲阳极保护效果十分有限,但可通过表面涂层和钝化处理进行保护;非金属材料可选择玻璃纤维,织物应使用水容性的材料;开孔的橡胶或泡沫材料吸水,不能用在舱门密封或任何须提供一致操作力的机构。
2.2.2 哈勃太空望远镜水下模型
哈勃太空望远镜的多次修复作业大大延长了其使用寿命,充分体现了航天员出舱活动的重要作用。其大量的维修试验和训练在中性浮力模拟器中进行,包括开关望远镜表面的门,拆卸和安装各仪器模块和太阳电池板等。
哈勃太空望远镜水下模型中某些需操作更换的模块在初期采用低逼真度模型,用以进行概念验证测试。后而随着测试改进,逐步提高模型逼真度,最终完成测试改进的高逼真度模型用于人员训练,如图4 所示。

图4 轴向科学仪器低逼真度模型和高逼真度模型对比Fig. 4 Low fidelity and high fidelity model of axial scientific mockups
哈勃太空望远镜的内外表面都安装有确保出舱作业顺利进行的脚限位器插座、扶手和工具等。这些设施的位置和布局(见图5)均需要通过反复的模拟试验来确定。

图5 哈勃太空望远镜上的脚限位器插座和扶手布局Fig. 5 Foot restraint sockets and handrail locations on the Hubble Space Telescope
2.2.3 国际空间站水下模型
中性浮力实验室水槽长61.56 m、宽31.09 m、深12.18 m,可同时容纳2 个乘员组使用实物模型来完成训练任务,是美国目前唯一在用的航天员训练设备,主要用于航天飞机、国际空间站的出舱活动硬件设计验证试验和航天员任务训练。
图6 为中性浮力实验室水槽的典型模型配置,包括全尺寸的ISS 桁架、所有舱段(包括节点舱、俄罗斯舱段、气闸舱和货盘)、水下机械臂模型和日本HTV 货运飞船。根据特定的试验目标会适当调整模型及其位置。
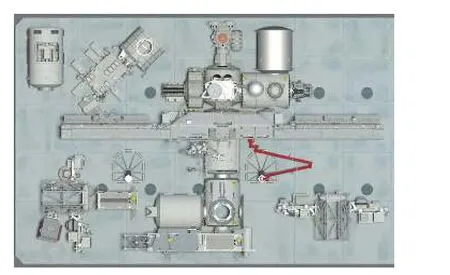
图6 中性浮力实验室水槽典型配置Fig. 6 Typical configuration of NBL
图7 和图8 为大型水下模型——国际空间站节点舱2 及其上的热交换器工作点,舱段上设置了大量排水孔,以利于进出水。图9 为中性浮力实验室小型水下模型。安装在舱段上的模拟件主要采用金属材质,铝质材料耐腐蚀性能相对较差,为了防腐及节约成本,低逼真度设备一般选用不锈钢和钛材料。需要进行中性浮力水下操作的工具采用非金属材质,部分没有进行中性浮力配平的工具采用金属材质。

图7 中性浮力实验室大型模型——国际空间站节点舱2Fig. 7 NBL’s large mockup example - ISS node module 2

图8 中性浮力实验室大型模型——国际空间站节点舱2 的热交换器工作点Fig. 8 NBL large mockup example - heat exchanger worksites of ISS node module 2
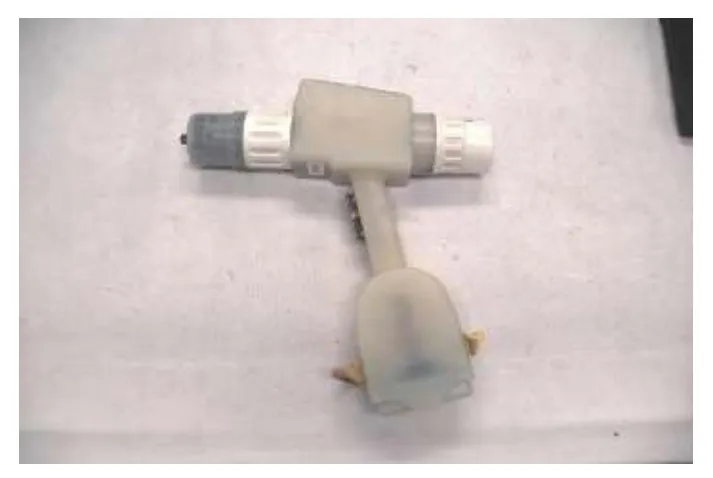
图9 中性浮力实验室小型模型Fig. 9 Small hardware mockup example of NBL
对于水下模型,中性浮力实验室规定了详细的模型逼真度分级,如表1 所示。

表1 NASA 中性浮力实验室模型逼真度分级Table 1 Classification of mockup fidelity for NASA's NBL
表1 中的各级别含义如下:
物理级别Ⅰ(一类模型典型用于支持乘员训练和工程验证)
1)飞行装配公差:定制为飞行尺寸规格。
2)相似材料:使用与飞行材料相同类别和特性的材料,比如金属类的用金属,塑料类的用塑料,织物类的用织物,但无须相同等级或规格。
3)精确配置:外观与飞行产品一致(包括尺寸、形状、颜色、方向和位置等)。
物理级别Ⅱ(二类模型典型用于乘员熟悉和设计研制)
1)宽松装配公差:不坚持飞行尺寸规格,差额由程序指定。
2)混合材料:一般与飞行材料具有相同的特性,但不必是相同类别、等级或规格,应优化选择以支持预期的功能。
3)近似配置:外观与飞行产品相似(如尺寸、形状、颜色、方向和位置等)。
物理级别III(三类教练模型典型用于乘员接口)
1)近似尺度:尺度与乘员体量近似。
2)可选材料:材料选用以简易为目的。
3)候选配置:根据试验需求配置。
2.3 国内飞行器水下模型
为保障“神舟七号”出舱活动任务水下训练和验证的需求,国内研制了气闸舱水下模型(见图10),用于对航天员出舱活动操作、程序以及气闸舱工效学设计进行验证。

图10 “神舟七号”气闸舱模型Fig. 10 Airlock mockup of Shenzhou-7 spaceship
气闸舱模型壳体结构以气闸舱正样状态为依据,舱内设备的尺寸和布局与正样状态一致,其舱体放置在支架车上,可实现起吊、停放等功能,舱体可沿轴线旋转。舱门采用了真实产品,舱体上增加了排水孔和配浮装置,以实现水下减阻和中性浮力。
3 水下机械臂
国外研制的水下机械臂一般是为了模拟相应空间机械臂的某些功能,用于完成与空间机械臂有关的试验和训练任务。空间机械臂主要用于空间站的组装、设备的取放及控制操作、外部设备监视以及航天员舱外活动辅助等,一般包括安装基座、臂架结构、末端执行器以及控制系统。目前比较成熟的空间机械臂有:国际空间站上最大的机械臂—由加拿大研制的空间站机械臂系统(Space Station Remote Manipulator System, SSRMS)及航天飞机机械臂系统(Shuttle Remote Manipulator System,SRMS);俄罗斯在国际空间站服务舱和“和平号”空间站上使用的“箭头号”(Strela)机械臂。以上3 种机械臂(见图11)均研制了相应的水下机械臂,下面分别予以介绍。
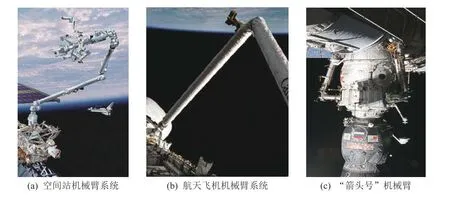
图11 国外空间机械臂Fig. 11 Space remote manipulator systems abroad
3.1 NASA 水下机械臂
中性浮力模拟器的水下机械臂系统(underwater remote manipulator system, underwater RMS)主要用于空间站机械臂系统的前期试验,见图12。该水下机械臂为电力驱动,由于水下有受试人员和潜水员工作,为保证人员安全,采用了防水电接头。防水接头可通过内部加压防止电器件进水,较好地解决了水下密封和水下安全性的问题。

图12 中性浮力模拟器的水下机械臂系统Fig. 12 Underwater RMS of Neutral Buoyancy Simulator
NASA 在中性浮力实验室水槽中建造了全尺寸的航天飞机机械臂系统和空间站机械臂系统的水下机械臂,见图13。

图13 中性浮力实验室中的航天飞机机械臂系统和空间站机械臂系统模型Fig. 13 Shuttle RMS and space station RMS mockups of NBL
中性浮力实验室中当前在用的两个水下机械臂具有如下特点:
1)两个水下机械臂系统均为全尺寸模型,其可变关节数量、角度与空间机械臂相同,能够准确模拟空间机械臂的运行。
2)机械臂基座都在水下——水下航天飞机机械臂系统模型一般安装在水下货物舱一侧;水下空间站机械臂系统模型没有按照真实状态安装到舱体上,而是安装在一个独立的水下支架上,参见图13。
3)水下机械臂采用钛合金制作,以保证刚度、减小质量,同时兼具防腐能力。
4)当前水下机械臂采用水压驱动,相比最初的电力驱动方式,在增加功率密度的同时消除了驱动部件发生漏电的风险,增强了安全性和耐用性。
5)水下空间站机械臂系统末端执行器仅为外形模拟件,没有远控捕获功能。
6)水下机械臂的运动控制在机械臂控制室内完成,控制室内有3 台监视水下情况的监视器以及2 个与真实机械臂控制器相似的手动控制器,如图14 所示。

图14 中性浮力实验室的机械臂运动控制站点Fig. 14 Station of NBL for controlling the motion of manipulator system
3.2 俄罗斯水下机械臂
俄罗斯加加林中心水槽中使用的水下机械臂模拟的是“和平号”空间站上使用的“箭头号”机械臂,其基座位于气闸舱顶部,可进行二自由度摆动,足以覆盖“和平号”空间站上所有的主要舱段。该水下机械臂采用单段臂架,臂架可伸缩,由多节可伸缩圆柱体与1 节固定圆柱体构成,每隔一定距离安装1 个用于配平的浮力块,以抵消重力,减小人员操作力,见图15。

图15 加加林中心水槽中使用的机械臂Fig. 15 Manipulator system used at neutral buoyancy facility of Gagarin Astronaut Center
该水下机械臂为手动人力操控,与空间机械臂的构型、操作方法、操作界面一致。不具备主动转移航天员功能,也不支持航天员站在末端定点操作。其工作模式如下:
1)航天员A 在基座处,用手摇动机械臂伸出臂杆,将位于机械臂末端的航天员B 运送到目的地附近;
2)B 下机械臂后固定好机械臂末端,A 借助六角形滑环沿臂杆自行滑行到目的地附近下机械臂;
3)A 和B 在舱壁安装脚限位器,然后进行舱外作业;
4)舱外作业结束后,先由B 借助六角形滑环沿臂杆滑行返回基座处;
5)B 返回后再用手摇动机械臂收回臂杆,帮助位于机械臂末端的A 返回。
4 结束语
美/俄及我国的载人航天发展历程表明,水下试验模型是出舱活动训练和试验的必备条件,其设计加工既要模拟真实的人机界面,满足操作真实感,也要在选材、工艺处理、活动机构设计等方面满足水下环境的要求。梳理美/俄两国水下模型的设计研制历程,本文总结出以下在我国后续相关设备设计中可借鉴的经验:
1)水下模型应与出舱活动相关的载人航天器同步设计和研制,以便充分开展航天器的工程验证、评价试验以及人员水下训练,保证出舱活动任务的成功。
2)航天器人机界面模拟真实准确是进行模拟失重水下试验的必要条件;航天器产品水下模型可根据试验训练操作及功能模拟需求进行逼真度分级,以简化设计建造过程。
3)大型航天器模型应进行分段设计,不仅有利于吊装转运,也可提高使用灵活性。
4)水下机械臂的自由度和驱动方式应根据实际需求进行设计。美国的水下机械臂外形、自由度、关节可变角度与空间机械臂基本一致,驱动方式根据使用环境做了特殊设计,机械臂的固定方式和位置与空间机械臂不同;俄罗斯水下机械臂在外形、自由度、关节可变角度、驱动方式及安装方式上都与空间机械臂基本一致,且进行了浮力配平,以利于人员水下手动操作。
5)航天器水下模型使用频度高、时间久,必须重视对材料的选择和防腐设计,尤其是金属材料,应尽量选择钛、不锈钢及铝材等耐腐蚀金属。
