半挂汽车列车高速侧向稳定性控制研究
2021-11-06徐晓美蔡浩浩
徐晓美,颜 潇,蔡浩浩
(南京林业大学 汽车与交通工程学院,南京 210037)
近年来,随着高速公路路网覆盖率的提高,公路运输业得到了极大的发展。半挂汽车列车因其载货量大、运输经济性好等优点,已成为公路货运主力军。但半挂汽车列车自重与体积大、挂车质心位置高、牵引车与挂车间存在力和运动的相互干涉,这些因素使半挂汽车列车不仅操纵复杂,而且高速行驶时易于发生“摆振”“甩尾”“侧翻”等不稳定现象[1-2],继而引发重大交通安全事故。鉴于此,国内外学者开展了大量半挂汽车列车稳定性控制研究,较为典型的控制策略包括使挂车车轮转向的主动转向控制[2-5]和通过控制左、右车轮驱动或制动为车辆提供横摆力矩的直接横摆力矩控制[6-8]。本文中主要讨论使挂车车轮转向的主动转向控制问题。
目前挂车车轮主动转向控制主要是基于线性二次型调节器(linear quadratic regulator,LQR)理论设计挂车车轮的转向控制器[3-5],以提高车辆低速行驶的机动性和高速行驶的稳定性。在这些基于LQR的主动转向控制器设计中,大多都假设车辆运行参数是恒定的,但在实际车辆行驶过程中,车辆的运行参数是变化的,特别当车辆遭遇外界干扰时,基于LQR的主动转向控制器给出的车轮转角与实际需求间存在较大的差异。因此,近年来,研究人员开始考虑动态因素干扰对车轮转向控制的影响,通过鲁棒控制来减小理论计算结果与实际转角需求间的差异[9-10]。
高速行驶的汽车在遭受较高强度侧向风时,作用在车身上的瞬时气动压力会发生变化,从而影响到汽车的瞬态行驶稳定性[11]。鉴于此,考虑侧风干扰,建立5自由度“横摆-侧倾”半挂汽车列车模型,设计一种鲁棒控制器控制挂车车轮转向,以提高半挂汽车列车在侧风作用下高速行驶的侧向稳定性。
1 侧风干扰下挂车主动转向车辆模型
假设半挂汽车列车的牵引车和挂车之间通过牵引销连接,为实现包括侧翻控制在内的车辆稳定性控制,建立半挂汽车列车的5自由度“横摆-侧倾”运动模型,如图1所示。5个独立运动分别为牵引车质心侧偏运动、牵引车和挂车的横摆运动与侧倾运动。
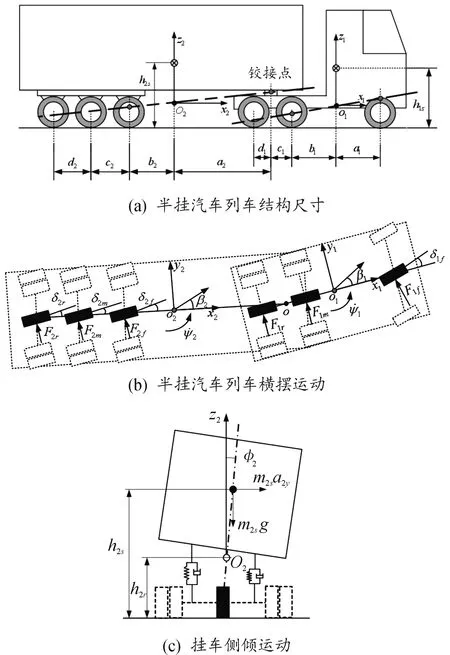
图1 5自由度半挂汽车列车“横摆-侧倾”运动模型
建模时,作如下假设:① 不考虑转向系统的影响,动力学模型输入直接采用车轮或车轴转角;② 不考虑牵引车和挂车的俯仰运动;③ 假定牵引车和挂车之间的铰接角较小;④ 假定车辆的纵向运动速度恒定;⑤ 假定半挂汽车列车的所有车轮侧偏角均不大于5°,即车轮的侧偏力和侧偏角之间满足线性关系;⑥ 不考虑弯道行驶时左、右两侧车轮所受的垂直载荷变化对车轮侧偏特性的影响。
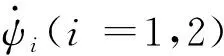
表1 图1中几何参数的意义
不考虑侧风干扰时,基于线性轮胎模型和图1,由牛顿第二定律以及牵引车与挂车间的约束关系,可以得到牵引车和挂车的运动微分方程。选取牵引车和挂车的质心侧偏角、横摆角速度、车身侧倾角和侧倾角速度作为状态变量,即
无侧风干扰时挂车车轮主动转向的半挂汽车列车5自由度动力学模型状态方程可表达为[12]:
(1)
式中:δ2m为控制输入矢量,即挂车中间轴车轮转角。挂车前轴和后轴的车轮转角可由式(2)计算。
(2)
侧风干扰会影响半挂汽车列车5自由度模型的精度,增大理论模型与实际车辆系统间的误差,这种误差可看作系统的不确定性。在车辆行驶过程中,不管是参数摄动,还是外界干扰,它们所引起的系统不确定性,在车辆动力学模型上都以侧向力、横摆力矩和侧倾力矩的形式表现出来。当半挂汽车列车受到侧风干扰时,牵引车和挂车的运动微分方程中都增加了气动侧力FY、气动横摆力矩MZ和气动侧倾力矩MX,如式(3)所示[13]。

(3)

(4)
式中:Ara=M-1Aa,Bra2=M-1Ba2,
b111=-(a1+b1+c1)k1αf,
Dra21=O8×2,Dra22=O8×1。
上述表达式中,1表示牵引车,2表示挂车,h1cr和h2cr分别表示牵引车和挂车悬挂质量侧倾中心到铰接点的高度;k1αf为牵引车前轴车轮的等效侧偏刚度;kCX、kCY、kCZ分别为CX、CY和CZ与气动引起的车身横摆角之间关系曲线的斜率。基于式(4)可以对侧风干扰下的半挂汽车列车进行鲁棒控制器设计。
2 鲁棒控制器设计
半挂汽车列车挂车主动转向控制器的设计通常选择牵引车和挂车的侧向加速度作为车辆侧向稳定性的评价指标。但前期的相关研究表明,若仅选择侧向加速度作为单一控制目标,挂车跟踪牵引车轨迹的跟随性会变差。通过对挂车质心侧偏角曲线的观察发现,挂车跟随性变差的直观表现是挂车质心侧偏角响应曲线的峰值急剧变大。若在控制半挂汽车列车侧向加速度的同时,考虑挂车质心侧偏角的影响,则可以同时改善车辆的侧向稳定性和挂车的轨迹跟随性。为此,选择挂车质心处的侧向加速度ay2和挂车的质心侧偏角β2为控制器的控制目标。
(5)
定义向量:q1=[vx10 0 0 0 0 0 0 ],q2=[0vx10 0 0 0 0 0 ],q3=[0 0 0 0vx20 0 0],q4=[0 0 0 0 0vx20 0],vx1和vx2分别为牵引车和挂车的纵向行驶速度,则


图2 挂车主动转向闭环控制系统结构框图
(6)
基于上述分析,设计一个H∞输出反馈控制器,对于广义系统:

(7)
最后,使用Matlab软件中的命令hinfric,基于Riccati方程求解,可以得到系统G(s)的输出反馈控制器。
3 仿真结果与分析
搭建车辆的TruckSim与Simulink联合仿真平台,将所设计的鲁棒控制器应用于TruckSim中的半挂汽车列车,研究半挂汽车列车的侧向动力学特性和挂车跟踪牵引车轨迹的跟随性,以验证所设计鲁棒控制器的有效性。
仿真工况为高速单移线和双移线工况,车辆行驶车速均为80 km/h,路面附着系数为0.85。图3~10的仿真结果曲线中的相关图例说明如表2所示。

表2 仿真结果图中的图例说明
3.1 单移线仿真工况
图3是单移线工况下2种半挂汽车列车的牵引车前轴中心与挂车后轴中心的行驶轨迹。由图3可知,传统半挂汽车列车的挂车后轴与牵引车前轴的行驶轨迹间存在较大的横向偏差,并且在变道过程中挂车后轴出现了明显的“过冲”现象;而基于鲁棒控制的主动转向半挂汽车列车,其挂车后轴能够较精确地跟踪牵引车前轴的行驶轨迹,并能有效抑制变道时挂车后轴的“过冲”。
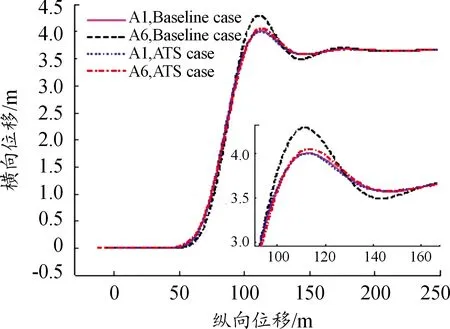
图3 牵引车与挂车的行驶轨迹
图4~6是单移线工况下传统半挂汽车列车与主动转向半挂汽车列车的侧向动力学特性响应曲线。由图4的质心侧偏角对比可以看出,主动转向半挂汽车列车的挂车质心侧偏角响应超前于传统半挂汽车列车,这意味着控制挂车车轮主动转向能够加快挂车对牵引车前轮转向输入的响应。此外,主动转向挂车的质心侧偏角与传统挂车的质心侧偏角侧偏方向相反,且侧偏角的绝对值较小,这有利于挂车对牵引车行驶轨迹的跟踪。

图4 牵引车与挂车的质心侧偏角
由图5的质心处侧向加速度对比可以看出,与传统半挂汽车列车相比,鲁棒控制的主动转向挂车质心处的侧向加速度幅值明显减小,其侧向加速度峰值为3.0 m/s2,比传统挂车的3.5 m/s2在数值上下降了14.3%。此外,侧向加速度后部放大系数(rearward amplification,RA)常用于评价半挂汽车列车的高速侧向稳定性,它是指汽车列车最后一节挂车质心处的侧向加速度峰值与牵引车质心处的侧向加速度峰值之比,该值越小则汽车列车的高速侧向稳定性就越好。据此定义,由图5可以计算出,传统半挂汽车列车的RA值为1.2,主动转向半挂汽车列车的RA值为1.0,可见挂车主动转向使半挂汽车列车的侧向稳定性提高了16.7%。

图5 牵引车与挂车质心处的侧向加速度
图6为单移线工况下2种车辆牵引车与挂车的车身侧倾角对比。可见,挂车车轮转向的半挂汽车列车,其牵引车与挂车的车身侧倾角均明显小于传统半挂汽车列车,其牵引车与挂车的最大车身侧倾角分别比传统汽车列车减小了14.3%和16.7%。可见,所设计的鲁棒控制器还可有效提高半挂汽车列车的侧倾稳定性。

图6 牵引车与挂车的车身侧倾角
基于上述分析可知,在高速单移线工况下,所设计的控制挂车车轮转向的H∞鲁棒控制器能够有效提高半挂汽车列车的高速侧向稳定性和挂车对牵引车轨迹的跟踪性能。
3.2 双移线仿真工况
为进一步验证所设计控制器的有效性,开展双移线工况下的半挂汽车列车侧向动力学特性和挂车轨迹跟随性研究。
图7是双移线工况下2种车辆的牵引车前轴中心与挂车后轴中心的行驶轨迹。由图7可见,与单移线工况时类似,在双移线工况下,传统半挂汽车列车的挂车也出现了明显的“过冲”现象。挂车后轴行驶轨迹与牵引车前轴行驶轨迹存在较大的横向偏差,而主动转向半挂汽车列车的挂车后轴始终能较好地跟踪牵引车前轴轨迹。

图7 牵引车与挂车的行驶轨迹
图8~10是双移线工况下2种车辆的侧向动力学特性响应曲线。由图8可以看出,与单移线工况类似,双移线工况下主动转向半挂汽车列车的挂车质心侧偏角响应也超前于传统半挂汽车列车,并且主动转向挂车的质心侧偏角幅值仅在较小的范围内波动,然后很快趋于0,这有利于提高车辆的侧向稳定性和挂车的轨迹跟随性。

图8 牵引车与挂车的质心侧偏角
由图9的2种车辆侧向加速度对比可以看出,传统挂车质心处的侧向加速度不仅明显大于主动转向挂车,而且其侧向加速度峰值出现了明显的波动,意味着传统半挂汽车列车在高速双移线运动时,车身出现了明显的横向摆振,而鲁棒控制下的主动转向挂车则能很好地抑制这种摆振运动。
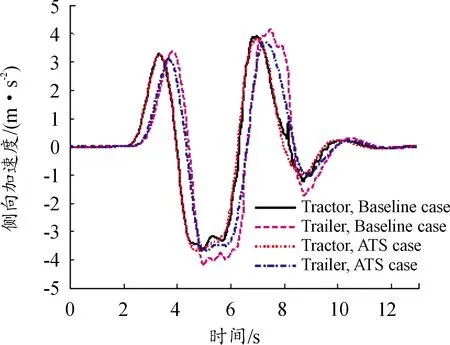
图9 牵引车与挂车质心处的侧向加速度
图10给出了2种车辆牵引车与挂车的车身侧倾角对比。由图可见,双移线工况下挂车主动转向的半挂汽车列车的牵引车与挂车最大车身侧倾角均明显小于传统半挂汽车列车,其值分别比传统半挂汽车列车下降了54.7%和56.7%。
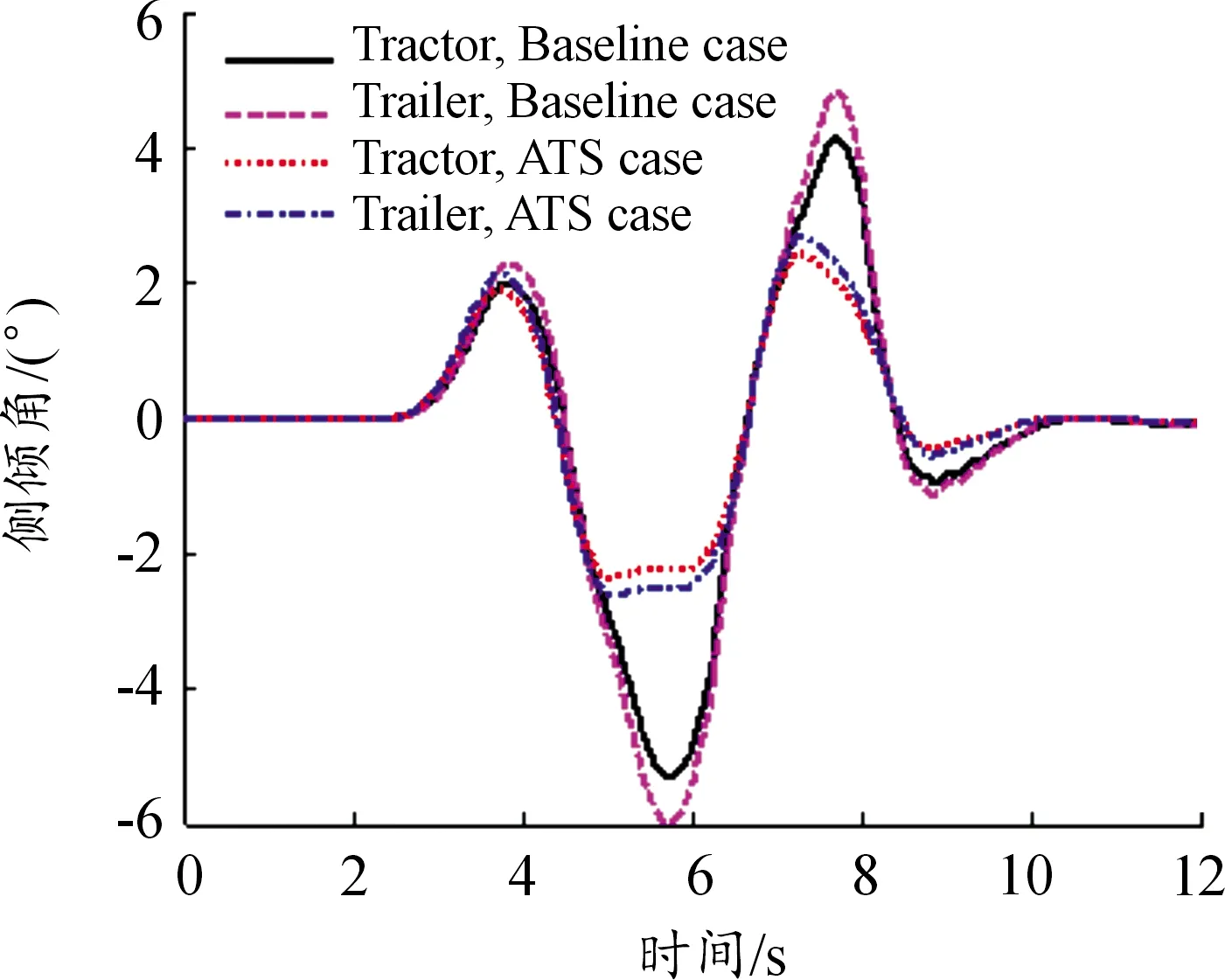
图10 牵引车与挂车的侧倾角
综上可见,在单移线和双移线2种仿真工况下,所设计的鲁棒控制器都能较好地提高半挂汽车列车的高速侧向稳定性和挂车对牵引车轨迹的跟踪性,从而确保侧风干扰下半挂汽车列车的行驶安全性。
4 结论
基于相关假设,并考虑侧风干扰,建立了侧向风作用下的5自由度“横摆-侧倾”半挂汽车列车模型,以为半挂汽车列车的相关动力学问题研究提供车辆模型参考;在考虑半挂汽车列车横向稳定性的同时,兼顾挂车对牵引车轨迹的跟踪要求,以挂车质心处的侧向加速度和挂车的质心侧偏角为控制目标,设计了半挂汽车列车挂车车轮主动转向的鲁棒控制器;基于TruckSim与Simulink联合仿真平台,在高速单移线和双移线行驶工况下,仿真验证了所设计控制器的有效性。研究表明,在2种仿真工况下,所设计的鲁棒控制器都能较好地提高半挂汽车列车的高速侧向稳定性和挂车对牵引车轨迹的跟随性,从而提高侧风干扰下半挂汽车列车的行驶安全性。
本研究为高速侧风干扰下半挂汽车列车侧向稳定性的研究提供了一定的理论支持,对于低附着系数路面、其他一些行驶工况、以及瞬态干扰作用下的半挂汽车列车的行驶稳定性问题还有待进一步研究,以更大程度地提高车辆的行驶安全性。
