三维激光扫描测体积技术及其应用进展
2021-11-05乔俊峰周沅桢农永红李博宇资文华
乔俊峰,周沅桢,王 永,范 兴,农永红,李博宇,资文华
(1.云南师范大学能源与环境科学学院,云南 昆明 650500;2.红云红河烟草(集团)有限责任公司红河卷烟厂,云南 弥勒 652399)
1 引 言
随着测绘技术的不断发展,传统的接触式测量方式因存在损伤被测物体表面隐患、耗时耗力、依赖人工经验等缺点,已无法满足越来越复杂的体积测量场景。近年来,非接触式测量技术的发展在适应更多复杂测量环境、高效准确获得被测目标的表面轮廓信息等方面体现出了独特的优越性,尤其以三维激光扫描测体积技术为代表的非接触式体积测量方式在采矿、林业、建筑、医学等领域中的应用已逐渐崭露头角。
我国三维激光扫描在测量体积上应用广泛,邵晴利用基于飞行时间法的三维激光扫描设备设计了粮仓储量检测系统,经过对比试验结果与原始体积,得出最大误差不超过1 %的结论[1];高如新利用基于双目立体视觉的三维激光扫描设备测量煤堆的体积[2];陶依贝利用激光三角法测量传送带物料体积[3]。卢贞也针对三维激光扫描在林业上的应用进行了大量的研究[4],对于林木测量、森林生物量测定等工作有着重要意义[8]。国外对三维激光测体积的研究主要集中在在医学和工程测绘方面[5-7]。由于使用场景带来的各种实际问题,造成行业间技术水平不一,先进技术共享性差,阻碍技术的发展。所以整合各类先进的技术,科学选择与应用,对工业、建筑业等的发展都有着重要意义。
2 三维激光扫描技术原理
三维激光扫描技术就是通过扫描待测目标轮廓,获得一系列密集的点坐标(点云数据)来反映物体形状,该技术的关键是被测物体表面轮廓坐标信息获取和物体表面轮廓重建。基于不同的光学原理,三维激光扫描技术原理及其方法主要有飞行时间法、激光三角法、双目体视法和全息干涉法[3],其主要适用场景如表1所示。
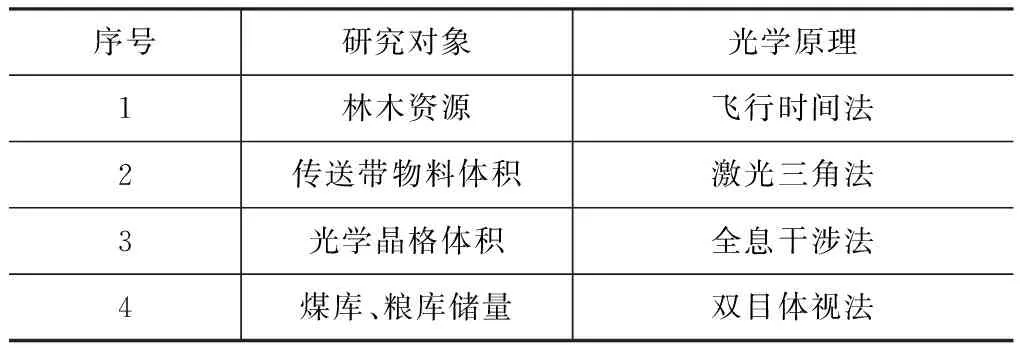
表1 几种常见光学原理利用情况举例Tab.1 Examples of several commonoptical principles are given
2.1 飞行时间法
飞行时间法是使用激光脉冲发射器向待测目标表面发射激光脉冲,经过待测目标表面后会发生漫反射,其中一些反射光会按照原路径返回到激光发射器,激光扫描设备通过记录激光发射时的时间和接收时的时间差Δt,再根据光的传播距离公式:S=C×Δt/2即可计算得到激光扫描设备和物体表面的距离,典型的激光雷达扫描系统就是基于该原理。朱铁军基于该原理进行了粮堆体积测量试验,分析表明应用三维激光测量粮堆的方法具有良好的可行性,并适用于多种不规则粮堆的测量[8]。这种方法的优点是可检测距离远、受环境光影响小,但是对时间记录的精确度要求极高,购置高精度时间计算模块就会使成本过高。
2.2 激光三角法
激光三角法顾名思义就是利用相似三角形原理,结合激光传感器来计算得到待测物体表面与参考面之间的距离,再根据提前标定好的设备坐标等来获得物体表面坐标,广泛应用于高精度工业检测领域。陶依贝利用基于激光三角法原理的激光扫描系统测量传送带物料体积,并经过现场实验验证测量结果的误差在3 %以内,证明基于该原理测量的可行性、可靠性[3]。该方法与飞行时间法相比成本低,且测量范围广、结构简单、维护方便,是一种高速、高效、高精度、应用前景广阔的非接触测量方法,但由于相似三角形测距的原理,随着测量距离的增大,误差也会越来越大,这也是激光三角法的局限性,难以改变。
2.3 全息干涉法
全息干涉法主要通过对比两个光谱信息来获得物体的坐标信息,分别是发射的激光经过物体表面干涉后的光谱信息与保持不变的参考光谱信息,在利用全息干涉法原理的测量过程中,参考光的全部信息被提前记录在摄影底片上,参考光发射经过物体表面干涉后返回物光到传感器中,此时干涉条纹的亮度和形状完全由物光的振幅和相位所决定,所以可以从中解读出物体表面的三维坐标信息。全息干涉法精确度极高,非常适合测量精密物体或者结构复杂的物体。但是要想保证精确度,测量距离就很有限,且容易受到环境光的干扰。
2.4 双目体视法
双目体视法与前面三种方法不同,是唯一的一种被动式测量方法,通过模仿人的两只眼睛来获取两个视图信息,通过视差计算对待测物体进行定位。由于检测环境多变,检测系统各器件之间的位置关系也会影响到检测结果,为保证系统稳定性和可靠性,工作前对系统进行标定是很有必要的,目前使用最多的标定方法为张正友标定法[9]。测量设备中需要有两个高分辨率相机,工作时同一个物体在两个相机内成像,实现定位的最主要步骤为坐标点的匹配,即为物体表面一点在两个相机中的位置匹配,通过同一点在两相机中的位置坐标来计算物体表面点的坐标信息,所以匹配的越精确,获得的物体表面坐标信息就越准确。毛琳琳利用该原理设计了大堆物料测量平台,可实现对大堆物料的三维重构和体积计算,并通过实验验证该平台满足实际应用要求和操作需要[10]。双目体视法优点是成本较低的同时理论精度高,但也容易受到环境光干扰,在一些环境光强的场景中难以发挥出优势。
3 三维激光扫描测体积系统及其计算
三维激光扫描测体积系统主要由硬件系统和后处理软件系统组成。三维激光扫描一般分为数据获取、数据处理、表面建模三个工作模块[11],其流程如图1所示。
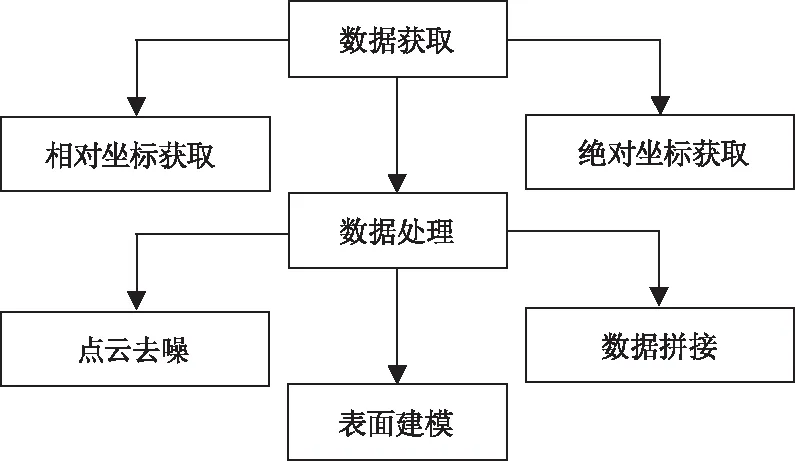
图1 三维激光扫描测体积流程Fig.1 3D laser scanning volume measurement process
3.1 激光扫描获取物体轮廓点云数据
利用三维激光扫描设备测量物体体积的首要步骤是获取物体表面轮廓的坐标信息,采集后的物体表面位置信息是一系列密集的点的集合,因看起来像是一朵不规则的云彩,所以也被称为点云数据,点云数据的获取直接关系到后期三维重建的质量[24],虽然各类激光扫描设备原理不尽相同,但是测量目的都是准确的得到物体表面轮廓的点云数据,刘鹏在基于多核DSP的激光点云三维重构技术研究中发现基于飞行时间法的激光雷达扫描得到的轮廓数据具有结构简单,处理方便等优点[13],再加上精密仪器工艺的发展,激光雷达扫描系统的成本也在逐步降低,所以近几年得到广泛的应用。孔德明利用激光雷达测量了列车车厢在或体积,实测数据证实测量精度较高,可直接用于车厢货物的自动化检测[14]。
以基于飞行时间法的激光雷达为例,获取点云数据计算方法如图2所示。由图2可知,激光发射器发射脉冲激光经由待测物体表面漫反射后,会有一部分激光按照原路径返回到光学接收器中,时间记录模块可以精确记录下激光从发射到接收的时间,从而计算出时间差Δt,由S=C×Δt/2即可得出三维激光扫描系统到被测物体表面的距离S。角度记录模块可以记录下激光脉冲发射时与水平面的夹角β,以及在水平方向上与初始标定方向的夹角α,再结合已知的值S,通过勾股定理即可算出被测目标表面点的坐标A。激光发射器发射激光脉冲的频率可达每秒几万个,所以该系统可以在极短的时间内扫描到大量的被测物体表面点云相对坐标信息,由于经常会涉及到多个三维激光扫描系统同时检测一个待测目标或者一个三维激光扫描系统转换位置对一个待测目标多方位检测,所以为保持数据的统一性,需要将相对坐标信息转换到绝对坐标系下,这时候就需要借助GPS提前确定三维激光扫描系统的绝对位置,进而实现数据转换。

图2 三维激光扫描系统示意图Fig.2 Schematic diagram of 3D laser scanning system
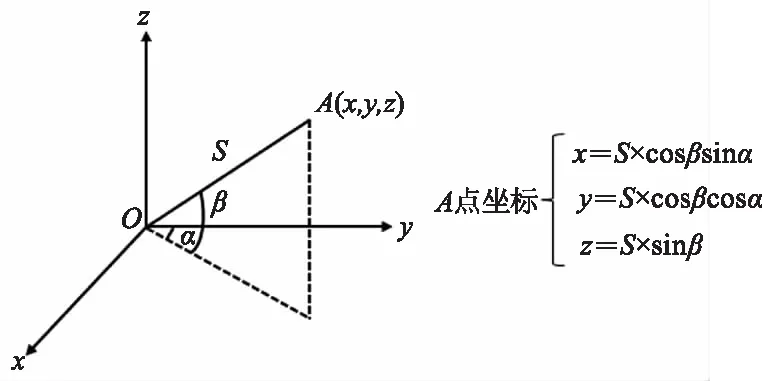
图3 飞行时间法计算原理Fig.3 The calculation principle of TOF
3.2 点云数据预处理
由于实际应用环境复杂多变,获取的点云数据往往都是散乱无章的,比如测量建筑工程工程土方量时施工现场的施工设备,点云数据的密集程度等等都会给体积计算带来影响[15]。所以获取物体轮廓点云数据后,需要对其进行预处理才能开展体积计算工作,预处理的主要步骤有点云去噪、数据拼接、表面重建等,其方法及作用如表2所示。

表2 主要的点云预处理过程Tab.2 The main process of point cloud pretreatment
由于被测对象表面因素、扫描系统本身及外界环境条件引起的测量误差产生的噪声离群点是不可避免的,噪声离群点对后期局部区域点云特征估计影响很大,其移除势在必行。王洪蜀在测量树冠体积的实验中,经过对每个点的邻域进行统计分析,并移除那些不符合一定统计标准的点,使处理后的点云数据轮廓更接近与真实情况。因有一些测量场景中,被测目标体积庞大,单一的扫描难以对物体进行完整的扫描,这时候就需要多个激光设备同时测量或者同一个激光设备转换位置多次测量,测量后要将获取的各个点云集合拼接起来才能得到完整的物体轮廓点云数据,常用的拼接方法有:特殊点法、坐标拼接和手动拼接。王瑞在对采空区体积测量研究中,利用C-ALS三维激光探测仪器探头对体积较大的采空区两端进行两次扫描,通过特殊点法和坐标拼接法将对采空区两次测量的点云数据进行拼接形成完整的轮廓表面[16]。
3.3 三维重建和体积的计算
虽然点云数据密集程度极高,但终究是一系列点的集合,要想实现体积计算,就必须对这些密集的点进行三维重建,得到真正的物体轮廓三维图形,现在广泛采用的三维重建方法为三角网格法。
三维重建后的物体是一个不规则体,无法用规则体的计算公式来得出体积,必须用到高等数学积分计算,还需要选择更加科学的方法。不规则体分割计算体积的方法有很多,已经进行大量研究的有切片法、切段法、三棱柱分割法、长方体分割法和体元计算法等等。李斌利用切片法计算不规则点云段块体积,实验结果表明,基于切片法的三维激光测体积系统计算方法正确、简洁、高效、可控,可以解决不规则体的体积计算问题[17]。以一块不规则石头的点云数据为例,计算时,首先标定不规则物体方向,然后沿着垂直方向平行切割成n个宽度极小且相同的片状,宽度为h(如图4所示),即可得到一系列对应的片状的边缘轮廓坐标(如图5所示),提取每一个片状体所对应的边缘点云数据,则可以将面积Si计算出来,进而求得体积,如式(1)所示:
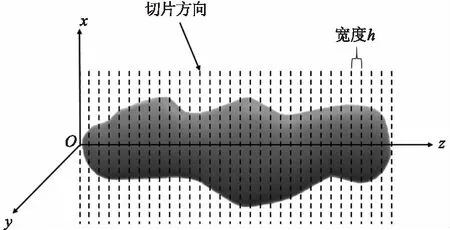
图4 点云数据切割示意图Fig.4 Schematic diagram of point cloud data cutting
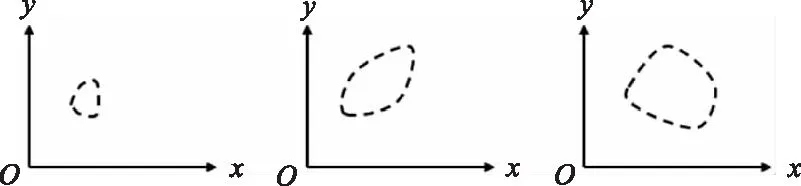
图5 切片法获取的片状轮廓示意图Fig.5 Schematic diagram of sheet contour obtained by slicing method
(1)
4 三维激光扫描在体积测量上的应用
4.1 三维激光扫描测体积技术在采矿业中的应用
矿山采空区具有三维空间复杂、分布不均匀、危险系数大等特点,传统的采空区体积测量方法主要依赖人工,同时必须进入采空区使用全站仪在水平方向上检测采空区边缘坐标,之后通过所有测得的水平面轮廓连线的方式构建出采空区轮廓,这种方式所得的结果往往误差较大、人工成本高,对于指导生产的参考价值有限。
采用三维激光扫描技术对采空区进行空间测量、模型重建、体积估算,可以实时掌握采空区的空间结构,以便修整开采方案,降低塌陷风险,对矿产生产安全有着重要意义。近年来,激光扫描测体积技术迅猛发展,大量学者对三维激光扫描技术在矿山采空区测量中的应用进行研究(如表3所示)[16,18-20]。
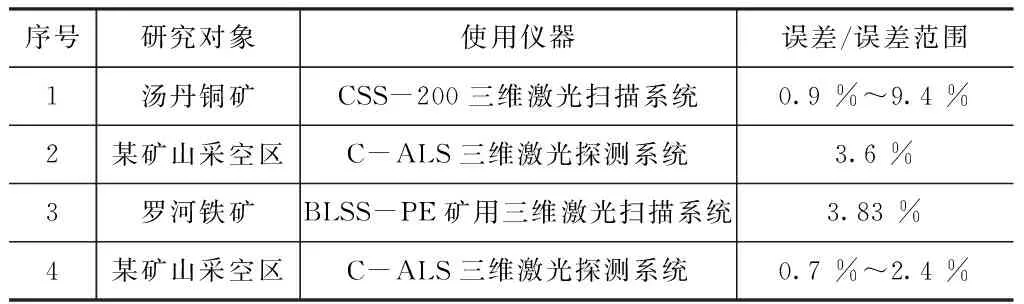
表3 采空区体积测量研究实例Tab.3 Some research examples of goafvolume measurement
采用三维激光扫描技术对采空区进行空间测量相比于传统计算方式更加快速和精确,王瑞使用C-ALS三维激光扫描系统对某矿山采空区测量中实现采空区超挖量、欠挖量的高效计算,对矿山采空区后期充填量预算具有重要参考价值。已经投入商用的矿山三维激光扫描系统有很多,大都基于飞行时间法,也就是激光测距的光学原理设计,其中比较优秀并且应用广泛的有C-ALS三维激光扫描系统、CMS空区激光探测系统,C-ALS是世界上唯一一款在50 mm钻孔中就可以深入地下进行空区探测的三维激光扫描仪(详细参数如表4所示),探头直径仅为50 mm,使用非常方便。

表4 C-ALS主要技术参数Tab.4 Main technical parameters of C-ALS
使用C-ALS三维激光扫描系统对矿山采空区测量时,需要提前打好直径为50 mm以上的钻孔,之后测量人员只需要站在地面上将激光探头通过伸缩杆送进采空区内部,即可开展测量工作(如图6所示)。有时遇到非常结构复杂的采空区,会出现单次测量存在盲区的问题,可以通过多钻孔多次转换位置测量,最后进行数据拼接的方式解决。三维激光扫描系统测量采空区体积的方式非常安全高效,最大程度保护了采空区周边结构,且测量准确率高,是目前采空区测量工作最为理想的方案。
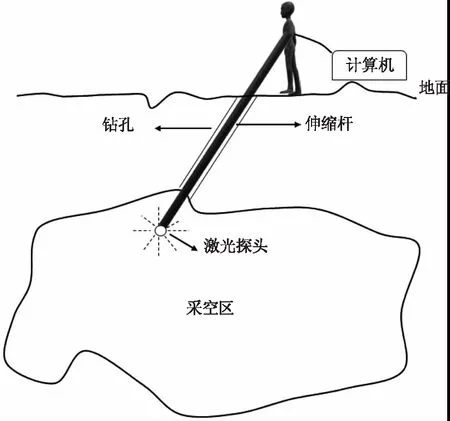
图6 三维激光扫描系统测量采空区Fig.6 3D laser scanning system measures goaf
4.2 三维激光扫描测体积技术在林业中的应用
在森林资源调查中,需要测量全部的树冠体积来确定森林的光合作用能力,以便对森林资源进行动态监控,实现森林资源可持续发展。但是由于树林地形复杂,树木分布不规则等特点,使人工测量工作量极大。
激光扫描技术在林业调查的应用也经历了漫长的发展过程,基地式激光雷达最先得到广泛应用,但是单个基地时激光雷达设备只能采集视野范围内的林木信息,谭远模利用提前在森林中设置目标球的方式实现多个扫描站采集数据最后可统一到同一坐标系下,实验结果表明将三维激光扫描技术引入到林业测量工作中可大大提高工作效率[21]。随后可移动的背包式激光雷达和机载激光雷达(ALS)被发明出来,Hyyppä等利用背包式激光雷达进行了森林资源调查工作,实验证明准确性良好的同时相较于传统方法耗时极短[22]。这两种可移动式激光雷达使林业测量工作不再需要或很少需要固定在地面上进行,避免了由于森林地形复杂给测量工作带来的麻烦。
近些年兴起的无人机载激光雷达(UAVLS),凭借着它操作简单,所需人力和检测环境要求极低的优势,在此类工作中逐渐崭露头角,Brede等就利用无人机载激光雷达测量地面生物量[23]。全迎比较了ALS和UAVLS对于单个树冠体积的测量结果,实验证明了UAVLS相比于ALS有着更高的探测精度和结构参数提取精度。郭庆华在梧桐会直播报告中比较了地基激光雷达、机载激光雷达、无人机载激光雷达以及应用极少的星载激光雷达的检测精度、工作难度、人工成本等方面,最后表明近地面的无人机载雷达最适用于森林资源的检测,在大尺度森林遥感监测中有着很好的应用前景。
4.3 三维激光扫描测体积技术在建筑业的应用
在建筑项目中,土方量的的计算关系到整个项目的工程预算、施工进度规划、场地空间规划以及工程监理工作。高梓成利用RIEGL VZ-1000型三维激光扫描仪对建筑垃圾土方量进行扫描,通过建模后的三维模型来计算土方量,实现了建筑垃圾土方量的高效计算,并具有无接触、高精度等优点,为建筑项目管理规划工作带来极大的便利[25]。Hu等也将三维激光测体积技术应用到建筑项目中的开挖体积计算上,结果表明该技术比传统人工测量可减70 %~90 %的时间,可以快速、准确地获得开挖体积信息[26]。
在数字化城市建设中,建筑物是极其重要的一环,一些古建筑物由于历史悠久,结构与现代建筑天差地别,如何获取古建筑物轮廓信息,对文化古迹实现数字化保护具有重要意义。闫泽文将三维激光扫描技术同BIM技术结合起来,使用Focus S350扫描仪对古建筑物实地测量,获取点云数据后经过预处理,再运用3ds Max对古建筑物进行三维重建,根据三维模型即可对古建筑物进行几何质量的评价[27],这有助于文化遗产的保护修复工作,也对数字化城市建设中的难点具有重要参考价值。
4.4 三维激光扫描测体积技术在医学领域的应用
三维激光技术广泛应用于医学中的各个子领域,Ramírez等利用三维激光的定位和三维重建功能对骨肉瘤切割手术中的切割导向器实现可视化管理,对导向切割器的体积、形状、切割动作等进行精准把控,最大限度地减少因手术操作而可能引起的并发症[5]。Jani等对人体遗失骨骼进行补缺研究,三维重建后的骨骼模型可以准确量化遗失部位的空间体积,进而根据解剖特征和数字分析对遗失部位进行补缺,对法医的骨骼还原工作有极其重要的意义[6]。在医学的子领域中,三维激光技术应用最多且最为成熟的领域是牙科,Javaid等将三维激光扫描所获得的物理模型转换成数字CAD文件,便于定制零件的形状、体积,研究表明该方法有助于降低复杂性和生产周期,牙医可以利用这项技术来设计定制牙齿、牙冠、牙套、假牙等等[7]。目前来看,三维激光扫描技术在医学领域依然极具发展潜力。
4.5 三维激光扫描测体积技术在工业上的应用
工业生产在国家经济发展中扮演着重要角色,为支撑工业生产的生产力发展需求,三维激光扫描技术被引进工业生产领域中,Mhaske等将三维激光扫描结合显微技术应用到食品加工生产上,在不影响食品质量的前提下提高食品附加值[28]。陶依贝为了解决工厂传送带物料体积测量实时性差、准确度低的问题,开发了一套基于三维激光扫描的体积在线测量系统,该系统极大的提高了传送带物料体积测量的效率,免除人工成本,加快工业生产自动化进程[3]。还有类似粮仓、煤库等体积检测场景,三维激光技术都可以发挥出它的实时高效的优势,为工业生产带来极大的便利。
4.6 三维激光扫描测体积技术在农业中的应用
在大豆的垄上种植模式下,有着庄稼地面平整度差异大、植叶交错难以区分的难题,管贤平提出一种基于LiDAR的三维激光扫描系统,对单个大豆植株进行表面重建,最终实现大豆植株的快速分类和体积统计。Turunen等利用三维激光扫描技术进行地面三位水文模型重建,并在计算机中模拟土壤水力特性的长期变化会对表层径流产生很大影响,可以计算得出土壤耕作后会影响径流,使径流增加25 %[29]。直接量化之前只能凭经验才能得出的结论,对土壤水土平衡控制有着重要参考价值。
4.7 三维激光扫描测体积技术物流快递中的应用
随着网上购物的发展,快递包裹流量越来越大,如何准确地按体积分包,成为现在的热门研究方向,王占杰等发明了一种基于三维激光扫描技术的包裹体积测量技术,可以实现物流快递的大小区分,从而分体积装车,避免物流业“大塞车”现象,提高物流效率[30]。
5 展 望
由于计算机技术的发展,各种模型重建算法层出不穷,近些年已有学者开始研究基于深度学习的三维重建方法,精确度进一步提高,因此在三维激光测体积技术中,如何高效准确地获取点云数据,采集后如何进行科学的数据处理,使点云数据更接近于实际物体轮廓是现在主要的研究方向。在当前的点云数据采集工作中,最初只应用于军事领域的激光雷达技术有着成本越来越低,精确度极高的优势,未来将可能更多地出现在工业生产领域。总的来说国内在三维激光扫描测体积的应用方面非常强,但是缺少高精度设备的研发,缺乏核心技术,高端设备往往依赖于进口,这也是制约三维激光扫描技术在国内发展的重要原因。