船舶艉流场受预旋定子影响试验研究
2021-11-05郭春雨徐鹏韩阳王超郭欣雨
郭春雨, 徐鹏, 韩阳, 王超, 郭欣雨
(1.哈尔滨工程大学 船舶工程学院, 黑龙江 哈尔滨 150001; 2.水下测控技术重点实验室,辽宁 大连 116013)
在经济全球化的今天,航运作为货物运输的一个重要渠道,对拉动经济发展具有重要作用。然而,燃油成本的日趋提高,增加了企业负担。鉴于此,航运企业必须大力倡导节能技术,以达到降本增效的目的。另一方面,全球变暖趋势日益增加,船舶能效指数实施势在必行,船舶减排的重要性也受到了广泛关注。水动力节能附体效率高、成本低、易于实施等优势逐渐凸显[1]。预旋定子是水动力节能附体中的一种,其由多个固定不动且沿周向分布的机翼型叶片构成,它能够在桨前产生预旋流,降低螺旋桨能量损失,从而提高船舶的推进性能[2]。Celik等[3]以升力线理论为基础设计了一个螺旋桨后置定子程序并对螺旋桨的水动力性能进行分析。黄树权等[4]通过结合数值模拟和模型试验2种方法研究了预旋定子设计参数对水动力性能的影响。苗飞等[5]利用数值模拟的方法研究了定子周向布置形式、单个定子周向影响范围以及来流攻角对定子预旋作用的影响,并指出2个定子最佳布置角度为45°。苗飞等[6]通过分析前置预旋定子叶剖面阻力特性提出一种新型的叶剖面设计方法,最终船模试验证实了方案可行性。杨帆等[7]采用数值模拟和模型试验的方法评估了安装有预旋定子的某大型散货船节能效果,并通过速度矢量图和伴流等值图阐述节能机理。杨帆等[8]在先前研究基础上设计出一种预旋定子,并通过CFD方法对影响定子性能的3个主要参数(襟翼角度、襟翼宽度、定子直径)进行分析。凌乃俊等[9]以升力线理论为基础,结合CFD数值方法,通过引进加权因子,预报了设计环量对船舶节能效果的影响,并得出最佳设计环量,并与模型试验对比验证了设计方法的可行性。Gao等[10]对预旋定子的相关参数(周向布置形式、叶片数量、叶片攻角)对节能效果影响进行研究,并设计出一种预旋定子。
进入21世纪,国内外多家舰船研究机构都对前置预旋定子进行了较深入的研究,如中国船舶科学研究中心、大宇造船海洋株式会社、三菱重工业有限公司、荷兰海事研究所等。德国汉堡水池、瑞典船舶研究中心以及韩国船舶海洋工程研究所在船模水池进行过一系列模型试验,表明预旋定子的节能效果可达3%~5%,而且目前已在实船上获得应用[9],并取得了较好的节能收益。在国内,对预旋定子的研究起步较晚,整体研究水平较国外有一定差距,且研究大多集中在数值模拟,对模型试验验证较少。
通过模型试验获得准确的船舶艉流场信息一直是船舶与海洋工程实验流体力学领域研究的热点[11]。由于船艉几何形状的特点,艉流场流动复杂,具有较强的三维流动分离现象,这对艉流场信息的获取带来了很大的挑战。如今,粒子图像测速技术(particle image velocimetry,PIV)作为一种瞬态、全局、无接触的测量方法备受流体力学届关注。PIV技术从20世纪80年代开始发展至今,相关技术越来越成熟、越来越完善,同时准确性得到了众多学者的验证,试验结果也得到了广泛认可。因此,PIV技术迅速成为试验流体力学精细流场测量的首要方法。为此,本研究基于哈尔滨工程大学船模拖曳水池水下体视粒子图像测速系统(stereoscopic particle image velocimetry,SPIV)系统,对船舶艉流场进行测量,通过对有无预旋定子的伴流场中三向速度分布、涡量场分布以及旋涡强度进行艉流场流动特性分析。
1 试验设备、试验模型与测量工况
1.1 基本试验设备与条件
本文依托哈尔滨工程大学船模拖曳水池开展某散货船艉流场PIV试验,试验时遵循国际拖曳水池会议(international towing tank conference,ITTC)阻力测量规则,满足Fr相似,雷诺数Re>2×106。基本实验设备如下:
拖曳水池:长度108 m;宽度7 m;水深3.5 m;
拖车:车速V≤6.5 m/s;稳速范围:0.1~6.5 m/s;精度:0.1%;平均加速度:a+>0.09g;平均减速度:a->0.15g。
通过4自由度适航仪连接船模与拖车,4自由度适航仪型号为GEL-421-1,精度为1%。
1.2 试验模型与测量工况
本文进行PIV流场测量试验的模型为某型号单桨散货船,实船总长度为324.9 m,船模总长LOA=5.415 m,缩尺比λ=60,主要尺度如表1所示。
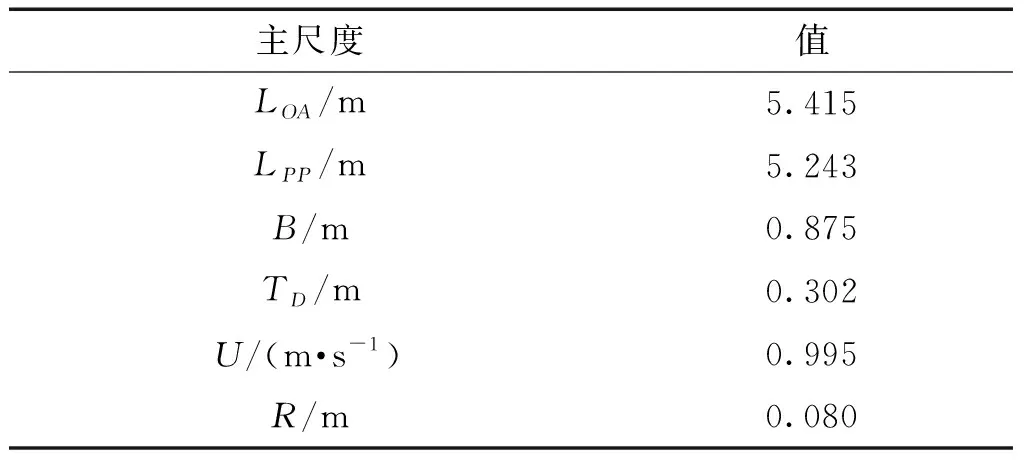
表1 某型号单桨散货船模型主要参数Table 1 The main parameters of ship model
散货船模型船艉部以及预旋定子模型均进行喷涂处理,防止试验时激光强反光对试验结果影响。试验模型及船体坐标系如图1所示,现规定原点位于螺旋桨盘面中心位置,X轴沿船模中纵剖面指向船艉,Z轴垂直向上,Y轴遵循右手法则指向右舷。预旋定子由上海船舶运输科学研究院提供,为不对称型叶片,叶片左右分布不对称,左侧有3个叶片,每个叶片剖面不对称,根据图纸采用 PLA材料经3D打印制作而成,并对预旋定子模型表面进行光滑处理。预旋定子叶片相对位置以及实物如图2所示。试验工况如表2所示,测量截面为螺旋桨盘面处(x=0 cm)及桨盘面后7.5 cm处(x=7.5 cm)。
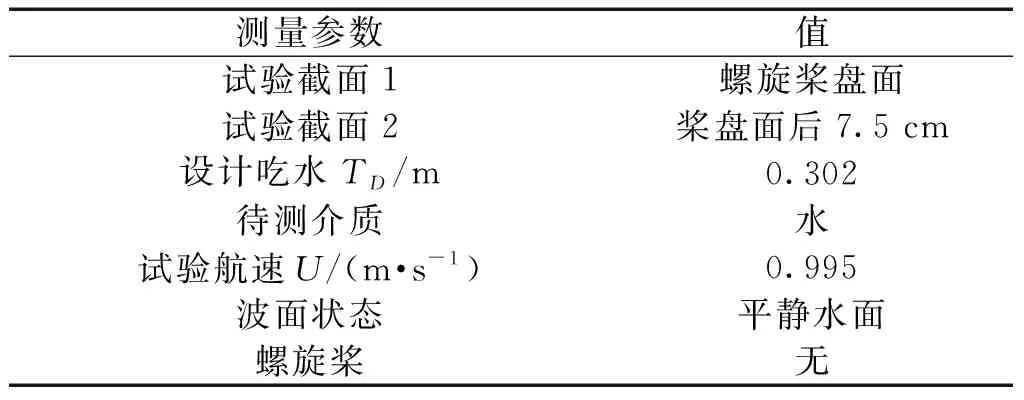
表2 实验工况Table 2 Test conditions
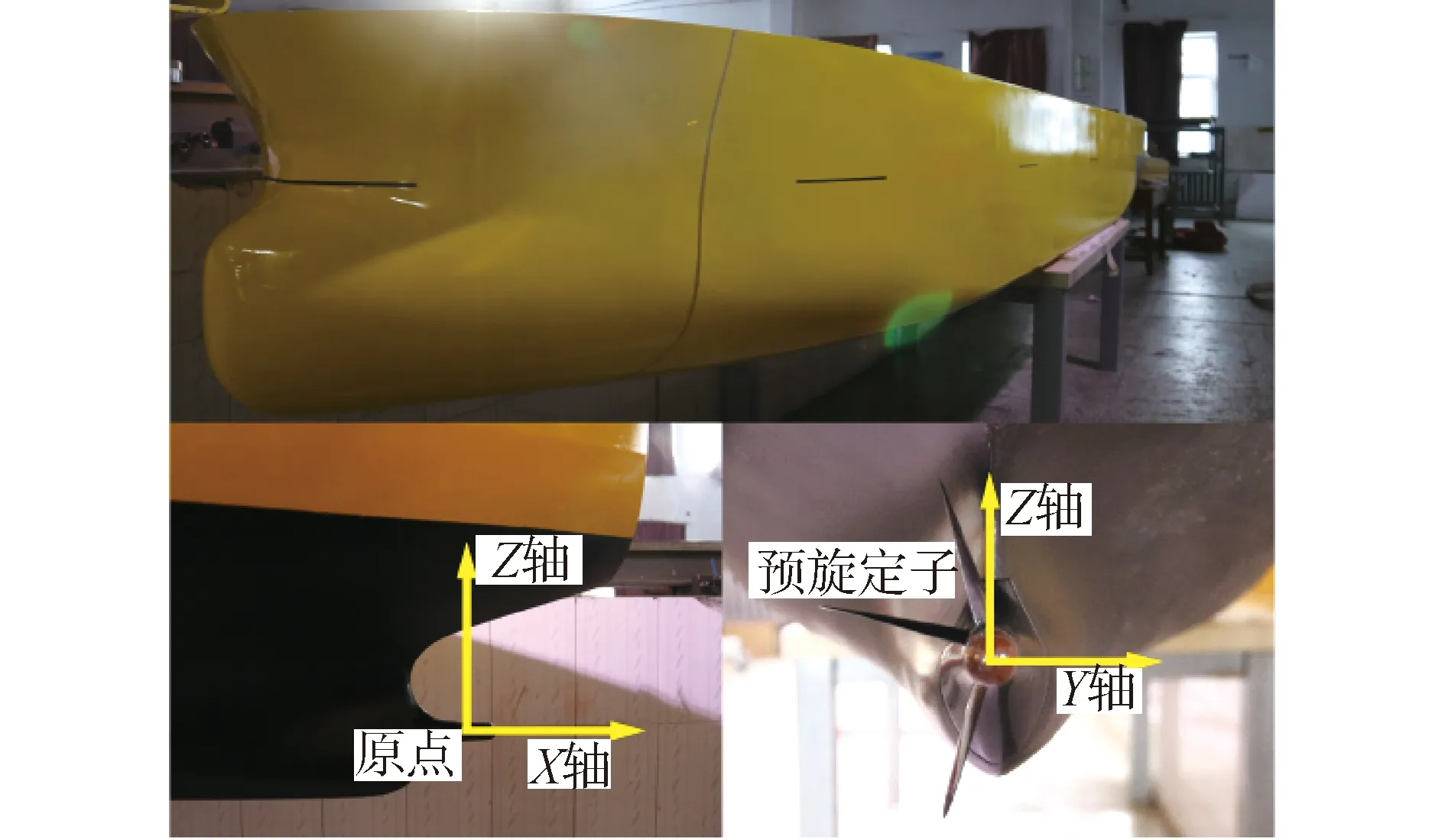
图1 试验模型及船体坐标系Fig.1 Test model and coordinate system
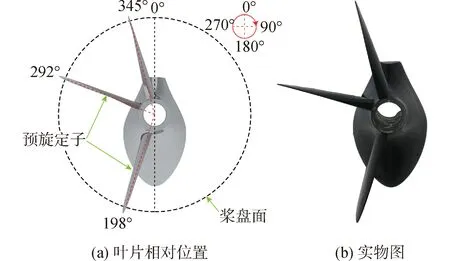
图2 预旋定子叶片相对位置以及实物Fig.2 Pre-swirl stator and relative position of the blade of the stator
2 船舶艉流场PIV试验测量
2.1 DANTEC随车式水下SPIV系统
本实验所用船舶艉流场测量设备为DANTEC公司为哈尔滨工程大学船模拖曳水池定制的随车式水下SPIV系统,布置于拖车右侧,SPIV系统规格参数如下:
CCD相机分辨率:2 048 pixel×2 048 pixel;
双脉冲Nd:YAG激光器:最大脉冲频率15 Hz;最大脉冲激光能量:1 200 mJ;常规工作能量:200 mJ;
激光束持续时长:4 ns;激光波长:532 nm;脉冲激光片厚度:0.6 mm;
最大测量范围:400 mm×400 mm;
示踪粒子:聚酰胺颗粒。
该套水下SPIV系统包含两台CCD相机、激光器、同步器和控制器。CCD相机以及激光光学元件布置于水下雷体中,激光导光臂和相机线缆铺设在支柱1和支柱2中,激光器、同步器以及控制器安装在拖车上。SPIV测试系统及拆解示意图如图3所示。
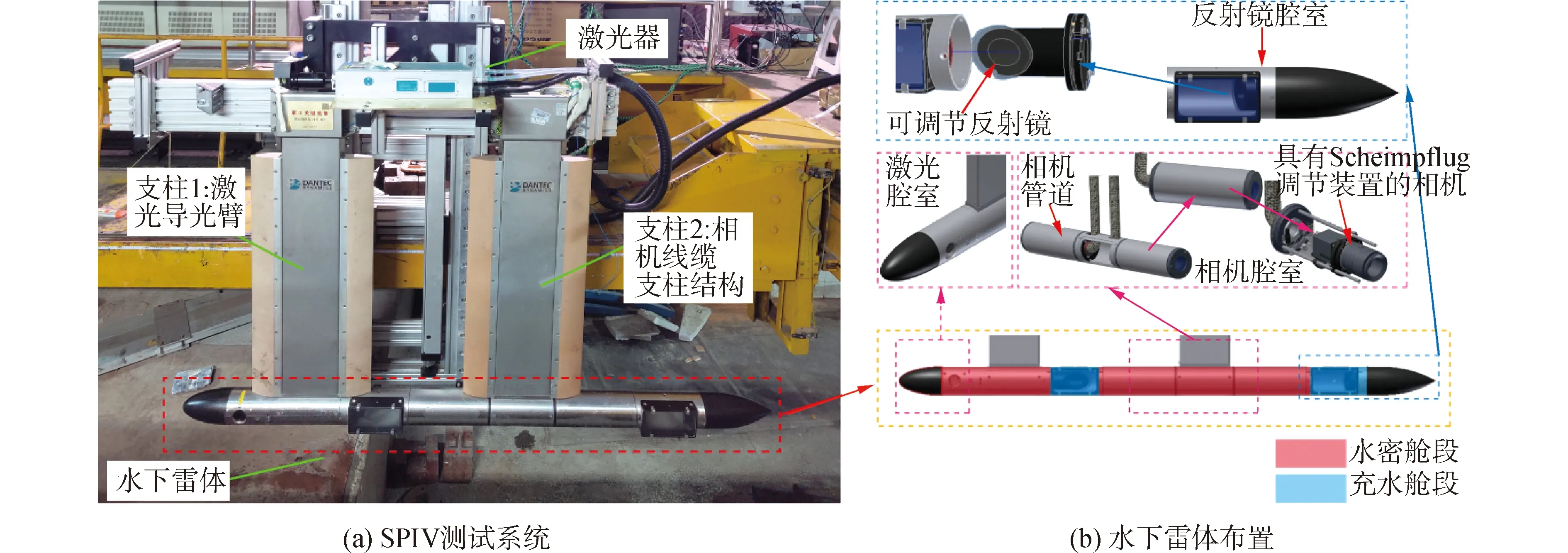
图3 SPIV测试系统Fig.3 The SPIV system of the probe in the submersible PIV system
2.2 PIV流场数据采集、测量与分析
采用50 μm的聚酰胺颗粒作为示踪粒子,每次试验开始前通过示踪粒子播撒装置将示踪粒子撒入待测水体,使每次测量过程中平均粒子浓度约为150 g/m3,即每个查问区域具有15~20个粒子,这样能够保证互相关分析的精确度。
系统工作时,由同步器控制激光器和2台CCD相机,在发出激光的瞬间2台相机从不同的角度拍摄测量区域中被激光照亮的示踪粒子,得到2组不同角度的平面二维流场矢量结果,通过标定信息最终重构出该平面测量区域的三维速度矢量。SPIV艉流场测量图与测量示意图如图4所示。
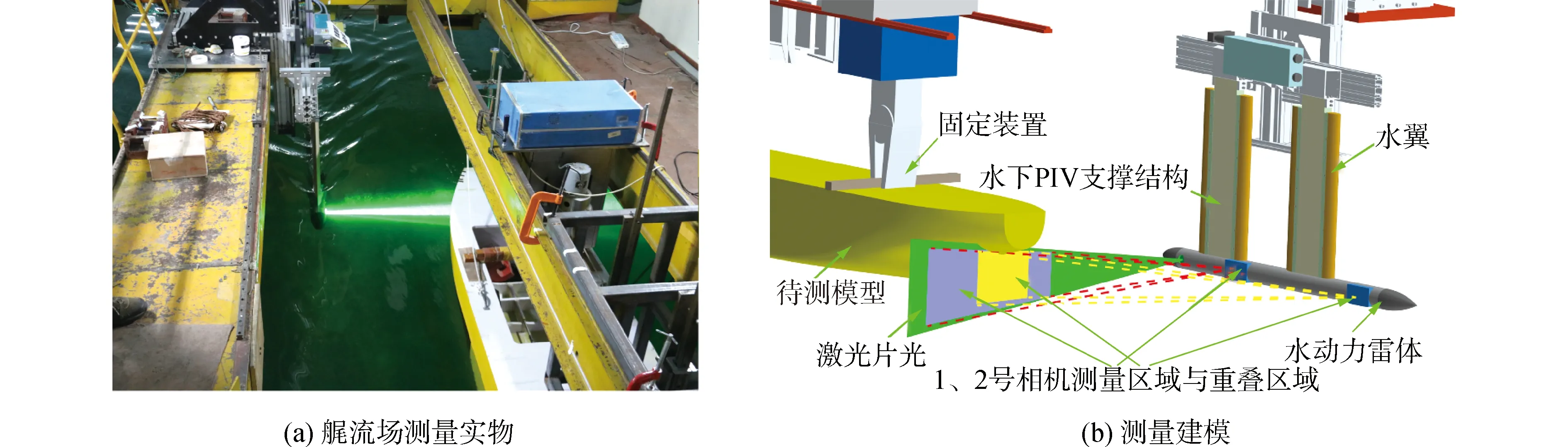
图4 SPIV艉流场测量实物与测量建模Fig.4 Measurement diagram and schematic of the SPIV measurement of the wake field
相机与脉冲激光器通过同步器控制,将SPIV系统的采集速率调至最大即7.5 Hz,保证进行测量时达到最大的样本采集量,每次测量过程中一共记录250组图像,拍摄总时长为33.33 s,数据分析时依据此250组瞬时照片进行时间平均得到最终结果。
CCD相机为双帧拍摄模式,2帧之间间隔为400 μs,这样能够保证示踪粒子在单位时间间隔内运动的最大位移不超过半个查询区域。采用Dantec Studio 6.2软件对试验图片进行批量处理与后续分析。自适应互相关算法获得流场矢量信息,查询区域大小设置为128 pixel×128 pixel,64 pixel×64 pixel,32 pixel×32 pixel,重叠率为50%。
吴铁成[12]应用该SPIV系统在拖曳水池中进行了大量艉流场试验,对该系统不确定度进行分析,并对KCS标模多工况下伴流场进行测量,与公开数据进行对比,验证了该系统的准确性。
3 船舶伴流场PIV试验结果及对比分析
3.1 船舶艉部伴流场速度分布
图5为某散货船缩比模型无预旋定子工况桨盘面处伴流场测试结果,利用拖曳航速U对结果进行无量纲化处理。由于激光反光及桨轴遮挡,部分流场结果无法获取,依据船舶的对称性,仅给出一半的流场测试结果,从图5中可以看出,散货船伴流场由于受到船舶艉部形状的影响,会产生舭涡,受舭涡影响,速度云图等值线具有明显的“钩状”结构,对应0.25≤u/U≤0.35,轴向速度等值线之所以会产生“钩状”畸变,是由于舭涡的存在将船体伴流中动能较低的流体传递至船体中心附近,弱化了该处原有速度,形成局部“钩状”结构。与此同时还观察到,一个与舭涡旋向相反、位于螺旋桨桨轴下方的假毂毂帽涡,上述现象与文献[13]中描述类似。
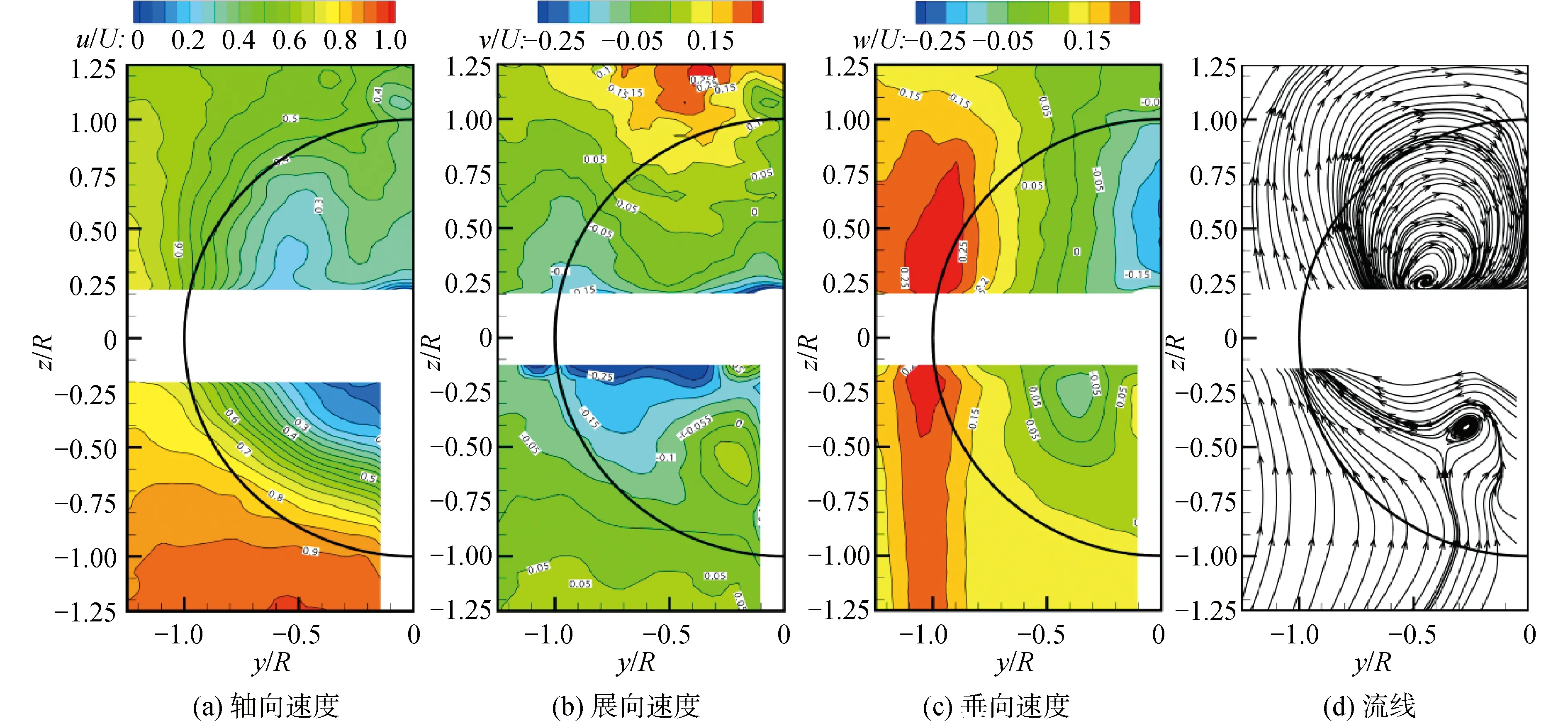
图5 无预旋定子工况桨盘面处艉流场Fig.5 The wake field without pre-swirl stator at propeller plane
图6为存在预旋定子工况下桨盘面处伴流场测试结果,利用拖曳航速U对结果进行无量纲化处理。桨盘面上方存在大量脉动速度是由于粒子浓度不均造成的。通过图6可以看出,预旋定子对艉流具有干扰作用,主要影响区域位于有叶片存在的左半部分,上方“钩状”结构被破坏,表现出速度等值线向桨盘面外部偏移。对于无叶片存在的右半部分,流场结果大致与图5相似,速度等值线具有明显的“钩状”结构,流场结构具有一致性。但两者仍有差别,表现出无叶片一侧的轴向速度增加,这是由于安装预旋定子以后,在桨盘面处,定子对水流有汇聚作用[14],使更多的水流汇聚到桨盘面,间接使得无定子一侧区域的平均轴向速度增加。可以得出,预旋定子不仅仅影响叶片存在的一侧,对没有叶片的一侧也会产生影响。同样,预旋定子对展向、垂向速度都有较大影响,使得流场等值线向桨盘面中心收缩,增加了桨盘面左上方流场不均匀程度。通过流线图可以看出,预旋定子产生的预旋流改变了桨轴下方的流线,降低了假毂毂帽涡强度。

图6 有预旋定子工况桨盘面处艉流场Fig.6 The wake field with pre-swirl stator at propeller plane
通过矢量坐标转换,得到了桨盘面处艉流场周向速度,如图7所示。利用拖曳航速U对结果进行无量纲化处理,并给出速度矢量大小。通过图7可以看出,预旋定子能够显著增加桨盘面外围的周向速度,对靠近桨盘面中心区域影响较小。对比有无预旋定子周向速度发现,有预旋定子工况无叶片一侧周向速度结构与无预旋定子工况基本一致,在存在叶片一侧,预旋定子使得周向速度显著增加,桨盘面外围速度等值线变得密集,切向速度梯度增加,产生与螺旋桨旋向相反的预旋流,这能够增加桨盘面进流,改善螺旋桨工作条件。
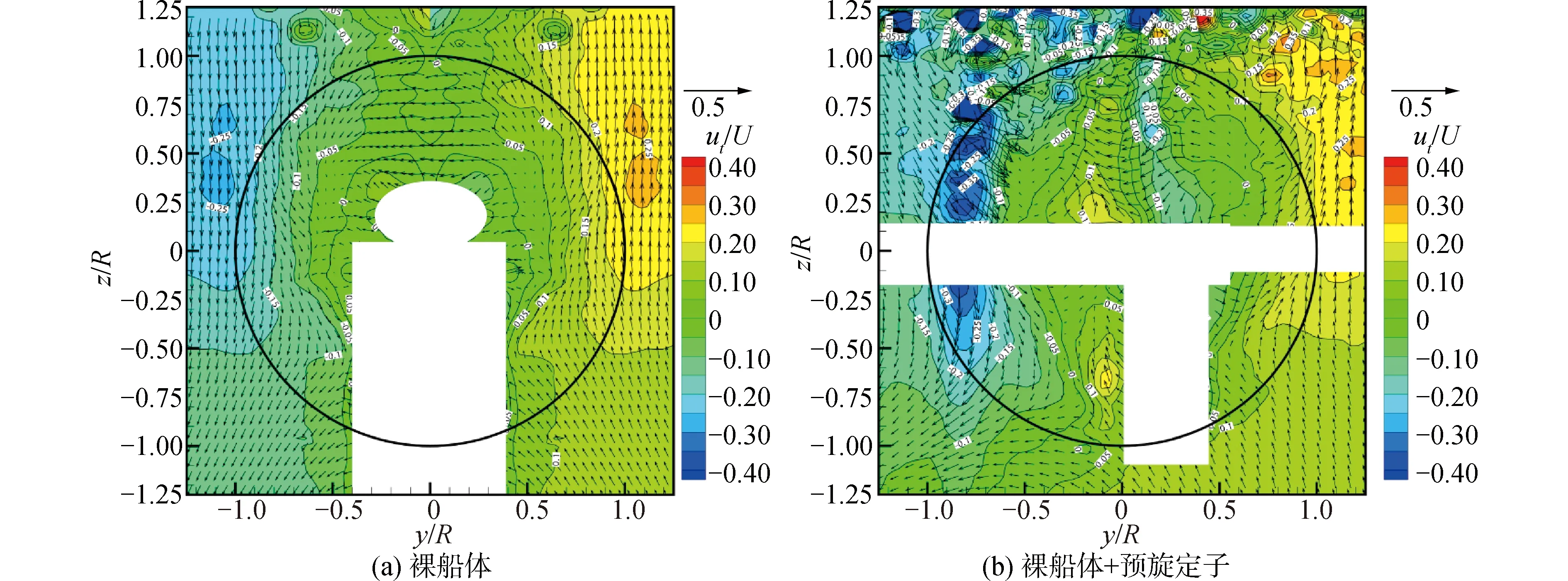
图7 桨盘面处艉流场周向速度对比Fig.7 Comparison diagram of tangential velocity of wake field at propeller plane
3.2 船舶艉部伴流场漩涡分布
图8为桨盘面处无预旋定子船舶艉流场的漩涡强度(swirling strength)与涡量(vorticity(X))测量结果,依据船舶的对称性,仅给出一半流场结果。其中,漩涡强度被定义为速度梯度张量J的复杂特征值虚部部分:

图8 无预旋定子工况桨盘面处漩涡分布Fig.8 Vortex distribution of wake field without pre-swirl stator
(1)
由于测的的结果为平面内数据,沿船长方向的平面数据梯度不能被计算,把它们设为零可以简化特征值计算,所以虚部的平方值可以计算为[16]:
漩涡强度的局部最小负值可以用来识别涡核,而正值表示流场,剪切力可能会被显示但没有旋转运动。旋涡强度的单位为1/s2。
围绕X轴的漩涡的涡量:

(3)
同样由于X方向速度梯度无法计算,所以仅围绕X轴的涡量可以显示为:
(4)
涡量的单位为1/s。
从图8可以看出,舭涡与螺旋桨假毂毂帽涡可以被很好地识别,图中涡量正值表示漩涡为逆时针旋转,负值表示旋涡为顺时针旋转。可以看出船模右舷处的舭涡为逆时针旋转,左舷处的舭涡为顺时针旋转,且是由船体中部舭部产生并传递至螺旋桨盘面。螺旋桨桨轴下方的假毂毂帽涡在右舷处为顺时针旋转,左舷为逆时针旋转,与舭涡旋向方向相反,螺旋桨假毂毂帽涡由船体艉轴处产生且随流体传递到螺旋桨盘面处,整体漩涡位置与范围与图5中的流线图相互对应。
图9(a)为加装预旋定子工况螺旋桨盘面处漩涡强度分布,图9(b)为螺旋桨盘面处涡量分布结果。
从图8和9(a)中可以看出,无预旋定子的船艉伴流场体现出了较明显的2组涡(舭涡及假毂毂帽涡),而有预旋定子的船艉伴流场整体上虽然也体现出此2组涡,但其周围还混杂着一些强度较低的涡;同时,从图9(b)中可以看出,已出现正反涡相互掺杂的现象,尤其是下方的一对假毂毂帽涡,考虑到螺旋桨旋向为右旋,而此紫色正值涡明显有扩散趋势,其旋向为左旋,以此可以看出,预旋定子能够在桨前产生与桨旋向相反的预旋流,从而改善螺旋桨工作条件,提高推进效率。
3.3 不同半径处的轴向速度分布
受桨轴遮挡作用影响,桨盘面位置处的流场存在数据缺失,因此取桨盘面后7.5 cm处流场作为有无预旋定子存在的轴向速度差异对比,从而分析出每一角度上有无预旋定子存在的轴向速度差异。
根据轴向速度云图,截取0.2R、0.4R、0.6R、0.8R、1.0R圆周范围内若干点上的轴向速度,每一圆周与预旋定子的相对位置关系如图10所示。将圆周视为钟表,规定0°位置为12点钟方向(指向船艉正上方),之后每间隔10°取一次点,从船艉前视,顺时针方向为正方向。最终,将轴向速度u使用拖曳航速U作无量纲化处理。轴向速度对比结果如图11所示。
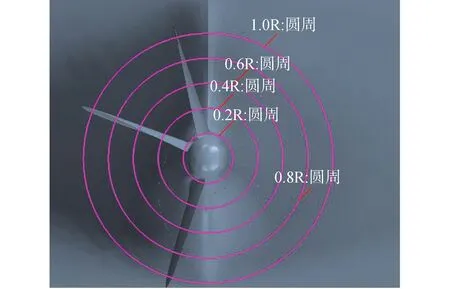
图10 0.2R~1.0R圆周与预旋定子的相对位置关系Fig.10 Relative position relationship between 0.2R~1.0R circumference and pre rotating stator
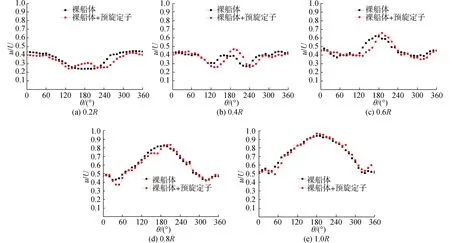
图11 x=7.5 cm处不同半径下轴向速度对比Fig.11 Comparison of axial velocity under different radius at x=7.5 cm
从图11中可以看出,随着船艉伴流向更大半径处发展,流场受船艉阻碍作用减小,对应船底部即180°速度提升最为明显,其逐渐恢复至外流场流速。另外,受“钩状”速度分布影响,在0.6R~1.0R内0°~45°、315°~360°内总会存在先增加后降低的速度分布规律。相比较而言,0.2R~0.4R内的相同位置处速度分布较为平缓。
对比有无预旋定子带来的速度分布差异,在0.8R与1.0R的数据中可以看出,2条曲线基本重合,差异主要来自0.6R及以内的部分。裸船体的艉流场速度分布大致关于180°对称;受非对称定子阻碍作用影响,存在预旋定子工况的速度分布并不明显对称,0°~180°内,2条曲线比较吻合。然而在另半圆周内,180°对应的速度峰值偏移10°~20°,此角度对应于下方叶片位置角度,且存在预旋定子时此偏移的速度峰值较裸船体180°的速度峰值提高10%~20%。观察上方2叶片附近位置的流场速度,与裸船体相同位置处的速度相比均有减少,但幅度较小,整体上下方叶片附近的流场差异更大一些。这与船舶艉部的舭涡、假毂榖帽涡的位置与旋向息息相关。不同叶片位置处相反的涡旋向导致了流场速度分布的不同。以上现象说明此预旋定子叶片布置形式,对于叶片存在的半圆区域(180°~360°)影响较大,下方叶片的存在对流场分布的影响更大,它导致了在0.6R内,下方叶片附近位置的流场加速现象,桨盘面流体进流速度增加,改善了伴流条件,对提升螺旋桨效率起到了积极作用。但同时,加装预旋定子对于桨盘面的流场均匀性产生了不利影响,在设计时应充分考虑。
4 结论
1)PIV技术是船舶与海洋工程领域重要的测量技术手段之一。本文利用PIV技术精确捕捉到某散货船艉流场中舭涡以及“钩状”速度轮廓等流场特征,“钩状”速度云图等值线对应的速度值约为u/U=0.30。充分显现了其具有瞬态、全局、无接触以及高精度等测量优点。
2)在桨盘面位置处,预旋定子对艉流具有干扰作用,主要影响区域位于有叶片存在的左半部分,上方“钩状”结构被破坏,表现出速度等值线向桨盘面外部偏移。对于无叶片存在的右半部分,速度等值线具有明显的“钩状”结构。预旋定子不仅仅影响叶片存在的一侧,对没有叶片的一侧也会产生影响。预旋定子使得周向速度显著增加,产生与螺旋桨旋向相反的预旋流,能够增加桨盘面进流,改善螺旋桨工作条件。在涡量图中,有预旋定子存在时已出现正反涡相互掺杂的现象,尤其是下方的一对假毂毂帽涡,由桨旋向以及涡的扩散趋势,可以看出预旋定子能够在桨前产生与桨旋向相反的预旋流。
3)对比有无预旋定子存在的艉流场轴向速度分布,可以发现此种布置形式的预旋定子在0.6R范围内的影响较大。受船艉伴流及艉涡的影响,中下方叶片对流场分布的影响更大,且造成附近速度峰值角度偏移、峰值增加,桨盘面流体进流速度增加,改善了伴流条件。
