基于正则化的雷达前视超分辨成像算法工程应用分析
2021-11-05王子曦
王子曦
(中国电子科技集团公司第十四研究所 江苏省南京市 210039)
1 引言
雷达成像系统具备全天时、全天候、探测距离远,成像分辨率高等优势,在地形测绘、战场侦查等军事民用领域扮演者重要角色。然而,合成孔径成像技术(SAR)和多普勒锐化(DBS)技术在飞行器正前方由于缺乏有效的多普勒带宽和 “左右模糊”现象,均无法对前视区域进行高分辨成像,形成了雷达成像区域上的“盲区”[1],如图1所示。

图1:雷达成像模式及区域分布示意图
近年来,突破“盲区”实现前视超分辨成像的需求越来越迫切,在民用航空领域,雷达前视超分辨成像可以为直升机、运输机等空中救援设备,提供雾霾天气影响下的目标区域图像,辅助飞行员实施安全降落或是物资精准空投;在军事应用领域,可提供战机正前方高分辨地图,实时获取军事设施布局与集群目标动向;并且作为弹载末制导阶段的雷达成像手段,可有效获取待打击区域高分辨图像,辅助弹头完成对正前方目标的精准打击。因此如何实现前视超分辨成像逐渐成为关注焦点。
基于反卷积的超分辨技术为雷达前视成像提供了新途径,其通过卷积反演技术完成对目标信息的重建,实现雷达方位分辨率的提升。但是反卷积技术也存在一定缺陷,其对噪声非常敏感[2],在频域表现为天线方向图的频带宽度不高,这样在直接逆滤波处理时会增加高频区噪声,对其分辨性能产生不利影响。
正则化方法是一类有效缓解反卷积噪声敏感性的方法[3],其通过先验信息设计相对应的正则化惩罚项来对解空间进行约束,从而获得相对稳定的反演解。在基于正则化的超分辨算法中,超分辨效果取决于正则化目标函数构造的准确性。因此在基于正则化的超分辨成像研究领域,关键问题为如何对目标函数进行优化设计,使其可对场景特征进行高效准确的描述。目前具有代表的几种超分辨方法主要如Tikhonov 方法、稀疏正则化方法、TV 方法等,其在目标函数的设计上各有特点。其中Tikhonov 方法是基于最小二乘解建立的,其通过设计基于范数的目标函数来限制能量,从而在确保解连续平滑的同时降低了噪声的影响[4]。稀疏正则化方法则利用重点目标在场景中的稀疏特性,通过范数对目标进行建模,从而实现了对集群目标的有效分辨,但由于过于强调场景稀疏性,此方法在进行目标分辨的同时会对背景轮廓造成一定的破坏[5-6];全变差(TV)方法[7-8]引入全变差约束条件,通过正则化方法对目标场景进行全变差建模,提高了对边缘起伏信噪比的敏感性,从而有效还原场景的轮廓特征。
上述方法代表了正则化超分辨算法几个主要思路方向,从理论上证实了正则化方法在改善雷达实波束分辨率方面的有效性,但是在工程应用方面还鲜有报道。因此,上述方法实时处理是否可行,适用条件是否限制,成像效果是否稳定等问题是正则化超分辨方法在工程应用方面需要进一步关注的。本文以雷达前视成像回波模型为基础,对当下具有代表的几种正则化超分辨方法进行仿真实验,并依据实验结果从算法实时处理、适用场景、性能稳定性方面进行分析总结,为正则化超分辨算法的工程应用提供参考。
2 雷达前视成像回波模型
图2 为机载雷达前视扫描成像过程的空间示意图,其中平台以恒定速度v 沿Y 轴方向直线飞行,天线波束以ω 的速度对前方区域进行周期扫描。
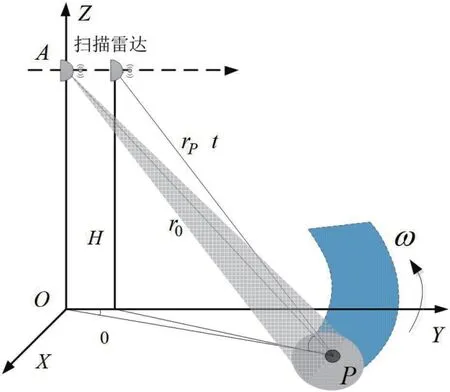
图2:机载前视扫描雷达成像几何关系示意图
设t 为方位时间变量,目标P 与雷达的初始斜距为r0、初始方位角为θ0。回波经去载频、距离脉冲压缩和徙动矫正,并对距离历史做泰勒展开,可得到如下信号形式[9]:


由上式可以看出,经徙动矫正后的扫描雷达回波近似为相位加权目标散射函数与距离脉压后的sinc 函数和方位向天线方向图的二维卷积。由于本文主要关注方位分辨率,因此可将方位信号单独表示为如下一维卷积形式:

3 正则化超分辨方法
正则化方法其实是一种自带正则化惩罚项的最小二乘方法,用于缓解反卷积病态问题,目标函数可描述如下:

正则项的设计是正则化超分辨算法的关键,需要根据具体的问题进行灵活的选择和设计。目前在业内具有代表的几个正则化方法分别有基于范数的Tikhonov 方法、基于范数的稀疏正则化方法以及基于全变差约束的TV 方法。
3.1 Tikhonov方法

其中L 为单位矩阵或者差分矩阵。正则化方法的目标函数是二次凸函数,其解连续而不依赖于初始估计。
3.2 稀疏正则化方法

但由于过于强调场景稀疏性,此方法在进行目标分辨的同时会对背景轮廓造成一定的破坏。
3.3 TV方法
全变差(TV)正则化方法,其惩罚项约束可表示为:

此惩罚项被称作图像的总变分。其结合线性观测而称作为TV方法,在进行数学分析时,可利用如下无约束最优化模型进行描述:

4 仿真实验
在第二节雷达前视成像回波模型的基础上,对三种具有代表性的正则化超分辨方法Tikhonov、稀疏正则化、全变差(TV)算法进行仿真分析。
图3(a)为一个海港场景,中间有数艘船只停泊。该场景中,港口一对并排停靠的船只用来评估各算法对点目标的分辨能力,机场跑道及其他港口区域用来评估算法的对面目标轮廓的恢复能力,平坦的海洋区域用来评估算法噪声虚警出现的情况。

图3:海港原始场景及雷达实波束回波
相关实验参数如表1所示。图3(b)为场景实波束扫描回波,整体平均信噪比为20dB。可以看出,由于实波束方位分辨率低,并排停靠的船舶已无法分辨,整个场景包括海岸线和陆地上机场轮廓都非常模糊。

表1:雷达系统参数
分别采用Tikhonov、稀疏正则化、TV 正则化方法对图3(b)实波束回波数据进行超分辨成像处理。
如图4(a)所示,Tikhonov 方法处理后,相对图3(b)的实波束图像而言整体分辨率明显提高,其中港口并排停靠的船舶已基本可分辨,机场及海港边缘轮廓也基本恢复,整个海洋区域并无明显寄生噪声虚警。

图4:正则化超分辨方法处理效果
如图4(b)所示,采用稀疏正则化方法处理后,港口并排停靠的船舶分辨率相比于Tikhonov 方法进一步提高,但港口边缘不清晰,机场轮廓也存在一定扭曲失真,并且海洋区域存在明显颗粒状噪点。
如图4(c)所示,TV 方法处理后,虽然船只分辨效果较稀疏正则化方法有所下降,但海港区域边缘清晰度提升明显,机场跑道轮廓也基本可见,而且无明显扭曲失真现象,海洋区域颗粒状噪点情况则介于Tikhonov 与稀疏正则化方法之间。
为进一步定量考察算法在不同信噪比情况下的成像质量,本文利用相对误差(ReErr)和结构相似性(SSIM)来衡量不同算法的结果。两种参数的定义详见[10]。分别考察三种算法在30dB、20dB和10dB 信噪比下的呈现性能如表2所示。
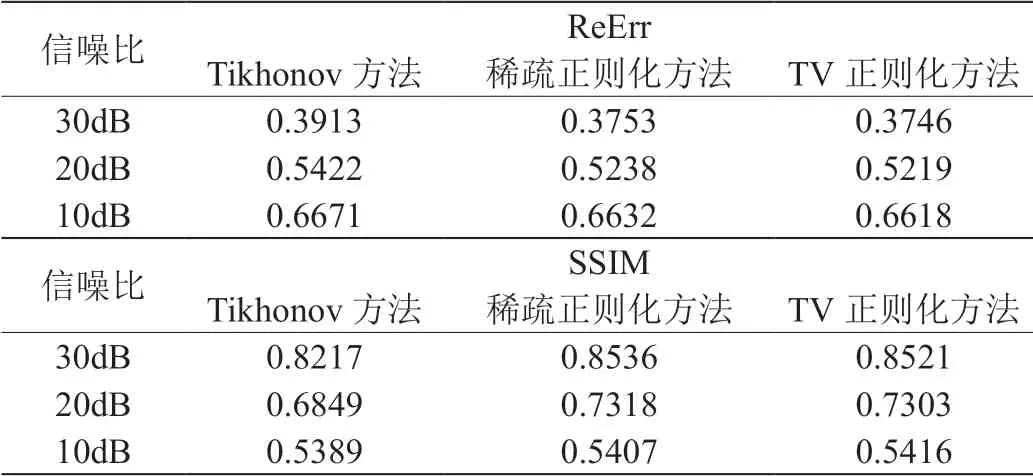
表2:算法在不同信噪比情况下的成像性能比较
由表2 可以看出,Tikhonov 正则化方法除了在低信噪比情况下性能与其他两个算法相当外,在高信噪比时性能均处于劣势,但总体上看三个算法整体性能并无明显差异,也就是说ReErr 及SSIM是个全局统计值,并不能完全体现算法之间对于不同局部场景的成像效果差异。
为考量算法的收敛速度及性能稳定性,分析三种算法在20dB信噪比下的均方误差(MSE)收敛曲线如图5所示,由图中曲线可以看出,Tikhonov、稀疏正则化、TV 正则化方法整体收敛速度相当,但是除Tikhonov 方法外,稀疏正则化、TV 的迭代曲线在到达极值点后将逐渐恶化,处于半收敛状态,该状态下输出解得稳定性变差。

图5:算法超分辨收敛曲线对比
5 工程应用分析
上文对三种具有代表性的正则化超分辨算法进行了仿真分析,进一步验证了算法在改善实波束分辨率上的有效性。而从工程应用的角度看,上述算法还需要从以下几点进行评估:首先是计算量能否满足实时处理要求,其次是适用场景条件是否有限制,最后是成像性能是否稳定,分析总结如下:
(1)实时处理方面,正则化超分辨算法采用快速迭代阈值收缩算法(FISTA)进行迭代求解,该方法比常规ISTA 方法收敛速度提高10 倍。总的迭代的计算复杂度如下式所示:

其中NR为距离采样点数,NA为方位采样点数,ND为迭代次数,按照表1 的参数计算,其单位时间计算量低于常规机载雷达中的空时自适应处理(STAP)及SAR 成像的计算量,因此正则化超分辨算法实时处理并非瓶颈问题。
(2)适用场景方面,三个算法侧重点各不相同,其中Tikhonov 正则化通过范数限制能量,在噪声抑制方面表现出色,但点目标超分辨效果及面目标轮廓清晰度一般,因此适用于单一平坦场景地区的成像观测应用;稀疏正则化方法利用点目标在场景中离散特性,通过范数对目标进行建模,可有效分辨集群目标,但面目标轮廓恢复较差,存在寄生噪点,因此适用于火控、导引头等主要关注点目标分辨的应用场景。TV 方法通过引入全变差约束项,在牺牲一定离散目标分辨率的情况下,提高了对场景边缘的敏感度,对地形几何起伏捕捉更精确,因此适用于地形规避、自主着陆等雷达成像应用场景。
(3)性能稳定性方面,除Tikhonov 外,稀疏正则化及TV 算法均存半收敛性问题,在实际工程应用中将难以输出稳定的超分辨成像效果,需要研究设计精准的迭代终止准则,目前这方面的国内外相关报道还比较少,需进一步研究完善。
6 结论
基于正则化的雷达前视觉超分辨方法是一类有效缓解反卷积病态性的规整化方法,近年来逐渐成为雷达前视超分辨成像领域的研究热点。本文以当下几个具有代表性的为典型案例进行仿真实验,并依据实验结果从工程应用角度进行了评估:
(1)正则化超分辨算法计算复杂度满足常规机载平台实时处理要求;
(2)算法需匹配特定特征的场景才可发挥最佳性能;
(3)稀疏正则化、TV 等算法解算呈半收敛特征,成像性能不稳定,需研究完善。
