基于分段优化的高速磁浮辅助停车区位置设置方法研究
2021-11-04吴冬华耿书恒侯圣杰薛健康徐洪泽
吴冬华,田 毅,耿书恒,侯圣杰,薛健康 ,徐洪泽
(1.北京交通大学 电子信息工程学院, 北京 100044;2.中车青岛四方机车车辆股份有限公司,山东 青岛 266111)
辅助停车区(Assist Stop Area, ASA)是为了满足高速磁浮列车发生异常情况无法停靠到前方车站需要临时停车而在线路上设置的停车区域。在ASA中设有供电轨或轨旁无接触供电装置。高速磁浮列车的车载直线发电机只在列车运行时才能满足列车用电需求,当列车在ASA停车后再启动运行时仍需供电轨或轨旁无接触供电等方式为列车补充提供电能。在上海高速磁浮线路中设置大量ASA。为了降低线路建设成本,ASA不适宜全线设置。ASA的设置位置和数量与列车安全悬浮曲线、安全制动曲线、线路结构等密切相关,是高速磁浮的研究重点和难点之一[1]。
目前,研究人员从列车运行控制方式、线路结构等方面对ASA设置方法进行了研究[2-7]。卞建光[2]建立了高速磁浮ASA位置生成算法,该算法根据安全悬浮曲线、安全制动曲线计算了上海磁浮试验线ASA的设置位置。杨轲[3]建立了基于速度防护曲线的ASA位置生成算法,对沪杭线进行了计算,并考虑了坡道对ASA设置的影响。虞翊等[4]提出一种基于基准运行速度曲线的ASA位置生成算法,并对多目标速度曲线下ASA的设置位置进行了分析。然而,目前的研究成果均未考虑道岔、弯道等线路结构对ASA设置的影响,导致ASA位置生成算法不能完全满足实际需求[8-10]。
本文根据道岔等线路结构对ASA位置的要求和列车的实际运行过程,提出一种基于分段优化的ASA位置设置方法,为高速磁浮线路的建设提供参考。
1 分区交接及约束条件
1.1 停车点步进控制过程分析
为了保证运行安全,高速磁浮线路上设置有多个ASA。运行控制系统采用将进路不断从一个ASA延伸到下一个ASA的方式以满足列车持续前行的要求[11]。列车的加速、涡流制动和滑行制动特性可以通过实际车辆动力学模型或实验测试的方式得到[12-15],在此基础上可以计算出到每个ASA的安全制动曲线、安全悬浮曲线和两个车站之间的列车运行速度曲线[2-4]。当列车速度位于当前ASA的安全制动曲线以下和下一个ASA的安全悬浮曲线以上时,可以进行停车点步进控制[4]。分区交接时停车点步进控制曲线见图1。
1.2 ASA计算约束条件
若车站A、B之间有n个ASA,定义A站往B站方向为正向。当列车正向运行时,可以计算出列车从A站开往B站的运行速度
(1)

(2)

(3)
若列车当前目标停车点为第i个ASA,其在位置scl的运行速度为vcl,则需满足
(4)

(5)
(6)

同理,当列车反向运行时,列车从B站开往A站的运行速度为
(7)
(8)
(9)

若列车在运行过程中的当前ASA为第i个,则列车在位置scl的运行速度vcl需满足
(10)


(11)
(12)
2 线路结构对ASA的要求分析
2.1 线路结构对ASA位置的要求
由于ASA承担着异常情况下乘客疏散任务,因此不宜设在线路条件复杂的位置。高速磁浮线路中包括道岔、弯道等多种结构,应考虑线路结构对ASA设置的要求,如:①在道岔前后,通常需设置ASA;②在大的弯道前后,通常需设置ASA[2-4]。
根据上述分析可知,高速磁浮线路道岔、弯道两端布置的ASA受到线路结构的约束,基本处于确定位置。高速磁浮线路的正线通常为复线,在车站内设置多条股道,道岔通常位于高速磁浮正线上靠近车站的两端。弯道通常与线路建设时地形等要求相关,一旦线路施工完毕,则弯道位置不会发生改变。因此,可以根据道岔、弯道的位置将整个高速磁浮线路分割为多个区段,在每个区段内分别进行ASA位置的优化计算,进而得到整个高速磁浮线路的ASA。
2.2 列车运行过程及特征分析
列车运行线路示意见图2。列车从A站到达B站的一次运行过程,可以分为以下3个阶段。

图2 列车运行线路示意
阶段1:从A站内部的ASA启动出发,加速运行,通过道岔前端位置确定的ASA,进入道岔。该阶段中列车运行特征为静止到加速,运行速度相对较低。
阶段2:通过A站道岔,经过道岔后端位置确定的ASA后进入正线,再经过一系列加速、匀速、减速以及弯道,经过B站内道岔前端位置确定的ASA后进入B站道岔。该阶段中列车运行特征为加速-匀速-减速。
阶段3:通过B站道岔,经过道岔后端位置确定的ASA后停车。该阶段中列车运行特征为减速到静止。根据资料,在该阶段线路中可以不设置ASA[2]。
列车从B站到A站反向运行时,运行过程相同,只是阶段1和阶段3经过的实际线路进行了互换。
综合列车在不同区段上的运行特征,可以将ASA的位置设置方法分为两类:
(1)在阶段1中进行ASA计算时需考虑正向运行要求,在阶段3中进行ASA计算时需考虑反向运行要求;考虑到列车在这两个阶段都是静止-加速运行,因此ASA的计算方法可以相同。
(2)在阶段2进行ASA计算时需考虑列车双向运行要求,所采用的计算方法有所不同。
3 ASA设置方法研究
3.1 不同阶段的ASA位置优化要求
本节根据列车运行过程不同阶段所划分的区段进行分析。
(1)阶段1和阶段3的ASA设置分析
在该阶段列车运行线路相对较短,列车在出站后4~12 km内会经过道岔,在道岔的前端会布置ASA。道岔附近的ASA位置与道岔位置密切相关。因此,该部分ASA的计算可以简化为固定长度区段内列车从静止到加速过程中ASA设置问题,重点研究列车加速对ASA位置设置的约束。该阶段ASA设置位置的优化目标为列车在该阶段的加速度值最小。
(2)阶段2的ASA设置分析
在该阶段列车运行线路相对较长,两端都会有根据道岔计算出确定位置的ASA。整个线路还可能有根据弯道等计算出的其他确定位置的ASA。因此,可以将该区段的ASA设置问题简化为在固定长度区段内设置列车初速不为0的ASA。该阶段ASA设置位置的优化目标为ASA数量最少和ASA之间的最大间距值最小。
3.2 基于分段优化的高速磁浮ASA位置设置方法
基于分段优化的高速磁浮ASA位置设置流程见图3。

图3 基于分段优化的高速磁浮ASA位置设置流程
(1)基于加速度的ASA计算方法
通常道岔距离车站4~12 km,在该区段布置1~2个ASA。以列车在正向运行为例,ASA计算的优化目标为
min(ayh)
(13)
如果只需要布置1个ASA,则ayh的约束条件为
(14)
(15)
(16)
(17)
(18)

如果需要布置2个ASA,则ayh的约束条件还需要增加
(19)
(20)
(21)

如果需要布置更多的ASA,则以此类推,很容易得到更多的约束条件。其计算流程见图4。

图4 基于加速度的ASA计算流程
(2)基于位置平均的ASA计算方法
列车在阶段2中经过的区段内,如果直接采用平均布置ASA的方法,两端的ASA可能会不满足式(5)、式(6)、式(11)、式(12)。因此,本文建立了一个在阶段2中的设计加速度比例参数ksj,采用该参数可以得到正向运行时列车运行速度
(22)
反向运行时列车运行速度为
(23)


(24)
(25)
(26)
(27)
优化目标为
(28)
式中:l1为ASA数量权值参数;ito为ASA数量;l2为ASA间距权值参数。
上述模型的求解流程见图5。
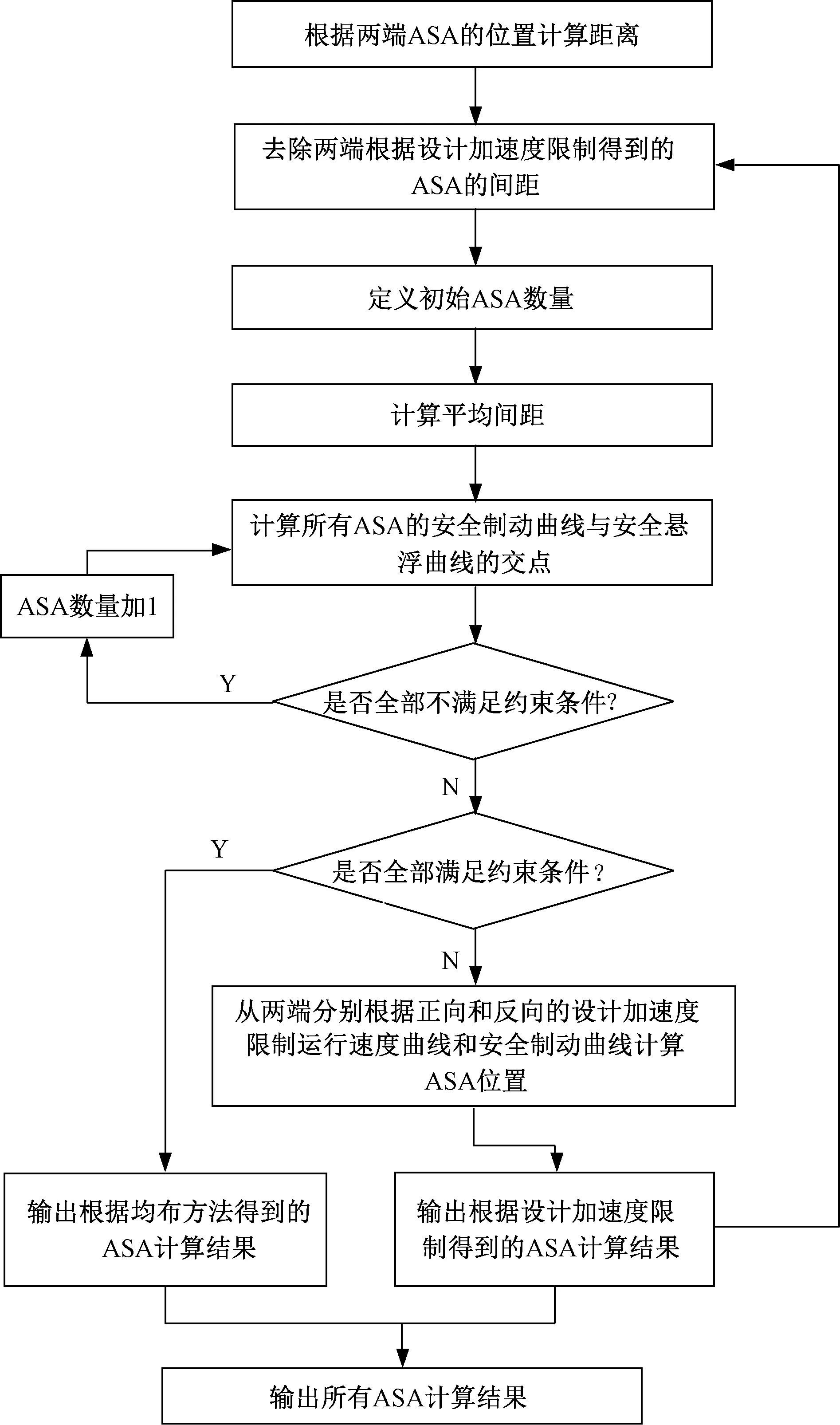
图5 基于位置平均的ASA计算流程
(3)反向上第一个分区中ASA按照加速度的ASA计算方法从反向上进行计算。
4 计算结果及分析
4.1 阶段1中区段的ASA位置及分析
加速阶段中道岔位置为5 km时,阶段1中区段上ASA位置计算结果见图6。

图6 阶段1中区段上ASA位置计算结果(道岔位置5 km)
从图6可以得到,第1个ASA中心位置为0.981 km,第2个ASA中心位置为4.392 km,设计加速度的优化结果为0.379 4 m/s2。根据文献[2]中列车在不同速度区间的牵引加速度限制,可以得到列车在从静止到达第1个和第2个ASA的过程中,牵引系统在加速过程中加速度限制的变化范围在0.615~0.618 m/s2之间,有利于牵引系统性能发挥。
本文建立的基于加速度的ASA计算方法,能够得到合理的ASA位置,使得列车在站内等场所从静止开始加速到固定的ASA的区间内,牵引系统在加速过程中的加速度限制变化范围更加小。
当道岔位置在5~6 km之间时,在阶段1中采用的设计牵引加速度的优化结果见表1。

表1 设计加速度最优值随道岔位置变化的计算结果
由表1中可见,随着道岔位置的增加,ASA的间距越大,设计加速度也会逐步增大,使得牵引系统允许的加速度变化范围越小,影响高速磁浮运行时刻表的设计。
4.2 阶段2中区段的ASA位置及分析
在阶段2中,当线路两端两个道岔确定的ASA间隔为40 km,设计加速度比例参数为0.9、0.5时,ASA的计算结果见图7。为了更好地表示各个ASA的曲线,图7中将第一个ASA的位置向右移动了5.5 km。

图7 设计加速度比例参数不同时阶段2中区段上ASA位置
由图7可见:
(1)第1个ASA与第2个ASA、第4个ASA与第5个ASA之间的间隔相同。这是因为该线路采用双向运行,在同样的线路条件下,两端的ASA对称,因此间隔相同。
(2)第2个ASA和第3个ASA、第3个ASA与第4个ASA的间隔相同,这是因为基于位置平均的ASA计算方法在进行优化时,将满足限制条件的ASA进行了平均分布计算。
(3)当设计加速度比例参数从0.9减小到0.5时,在5.5 km处的第1个ASA与第2个ASA之间的间隔变小;第2个ASA与第3个ASA之间的间隔变大,从10.117 km增加到11.761 km;第1个ASA终点的安全制动曲线与第2个ASA的安全悬浮曲线以及列车运行速度曲线包围部分的面积变大。这是因为设计加速度比例参数值越小,第1个ASA终点的安全制动曲线与基于设计加速度限制值计算出的列车运行速度曲线的交点的速度越小,进而采用该交点和安全悬浮曲线计算得到的下一个ASA位置距离变小;当ASA数量不变时,前后两个ASA之间的间距变小,则中间两个ASA的间距就会变大。
采用基于位置平均的ASA计算方法能够将ASA尽量平均的分布在整个区段上,使得列车紧急停车后,再次采用维护运行时对车载蓄电池的要求统一。
4.3 50 km平直线路计算示例
采用一条50 km的高速磁浮平直线路进行计算,列车商业运行速度为400 km/h,道岔出现在距离A站5、45 km处,设计加速度比例参数值为0.85,ASA的计算结果见图8。

图8 50 km平直线路中ASA计算结果
从图8中可以得到,建立的基于分段优化的ASA位置设置方法,通过将线路上道岔位置对ASA位置设置限制约束转化为不同区段上分别进行优化计算的方式,最终得到最合理的ASA设置位置。
5 结论
本文设计了基于分段优化的ASA位置设置方法,利用线路上道岔、弯道位置对ASA位置设置的限制约束,通过已确定的ASA位置将整个高速磁浮线路分割为不同的区段,并分别进行优化计算,最终得到整个线路上最合理的ASA设置位置。提出了两种ASA优化计算方法:
(1)基于位置平均的ASA计算方法,在满足停车点步进的要求下将ASA尽量平均分配在整个线路上。该方法可以根据磁浮线路实际情况,通过调整设计加速度比例参数值实现速度曲线的包围范围和ASA位置间距的调整。
(2)基于加速度的ASA计算方法,解决了列车在站内等场所从静止开始加速到固定ASA区间内的ASA布置问题。
基于分段优化的ASA位置设置方法为高速磁浮辅助停车区的位置设置提供了新的思路,为高速磁浮线路设计提供了指导。