数据融合在水下高速弹道测试中的应用研究
2021-11-04夏中亚王志刚
夏中亚,王志刚
(中国船舶重工集团有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
随着现在的水雷产品对目标精确打击方面的要求越来越高,对攻击弹道的控制精度有了更高的要求。因此,水下弹道测试系统对攻击弹道测量的精确性显得尤为重要,对水雷控制系统方案设计及弹道特性研究具有重要的指导意义,直接影响着试验验证和考核的效果。为了获取更准确的现场信息,依靠单传感器采集的信息已无法满足当前测试的需要,必须运用多传感器提供信息数据,进行综合优化处理来获取状态估计、态势评估等信息[1]。
在水雷试验测试中,为了检验、评定水雷武器的性能、精度等技术指标,常常涉及多个测试设备或多个传感器,这些传感器同时或分时对各类参数进行测量[2]。为获得武器系统的相关参数(如速度、加速度、姿态轨迹等),以往通常使用单一的测试设备进行测试,即使使用多个设备同时进行测试,通常也只是将几组测试结果作简单比较,以防止数据丢失和确认数据的有效性[3]。然而,使用多个测试设备同时进行测试,利用数据融合技术将测试结果进行有效融合,不仅可以扩展时间上和空间上的观测范围,还可以提高测试可信度并减少信息的模糊性、改善测试性能。本文以水下高速弹道测试为例,采用加权平均数据融合方法,从提高数据精度的角度阐述了数据融合技术在水雷弹道测试中的应用。
1 数据融合概述
1.1 数据融合的定义
数据融合是利用多传感器采集各种信息,并将这些信息进行多方面、多层次的数据信息检测、估计及综合,进而能正确地估计目标对象的状态和特征,以及进行态势和威胁评估的一种综合信息处理过程。它将不同时间、地点、模式和不同表现形式的信息加以融合,使系统能得到被测对象更为精确的描述[4]。
实际上,数据融合是对人类大脑综合处理复杂问题的一种功能模拟,其基本原理就与人类大脑综合处理信息的过程相似,它充分利用多传感器资源,通过对各类传感器及其观测信息的合理支配和使用,将各种传感器在空间和时间上的互补与冗余信息依据某种准则组合起来,产生对观测环境的一致性解释和描述[5]。从本质上说,数据融合的功能实现主要依靠信息冗余与信息互补[6],通过对各传感器观测信息的优化组合、协同处理,利用多个传感器共同或联合操作的优势,导出更多有效信息以提高整个测试系统的有效性。
1.2 数据融合的特点与原理
数据融合的特点就是能扩大信息的瞬时、空间搜索范围,提高系统的探测性能,增加目标的特征矢量维数[7],增强系统自适应性和容错能力,降低系统推理模糊程度,提高目标信息的可信度,得以提高整个系统的性能。
数据融合系统由于其具体结构的不同而有着多种多样的形式,其功能原理基本一致,如下所述[8]:
1)N个不同类型的传感器采集观测目标的数据;
2)对传感器的输出数据进行特征提取的变换,提取代表观测数据的特征矢量;
3)对特征矢量进行模式识别处理,输出各传感器关于目标的说明数据;
4)将各传感器关于目标的说明数据按同一目标进行分组,即关联;
5)利用融合算法将各传感器数据进行合成,得到该目标的一致性解释与描述。
根据数据融合系统的功能原理和作用,其通用功能模型如图1所示。
该模型的功能包括:
1)对多信源信息在不同层次上进行处理,每个层次代表信息处理的不同级别;2)其完整的流程包含检测、关联、跟踪、估计和综合;3)根据融合层次区分,融合的结果分为低层次上的状态和属性估计、高层次上的态势估计和威胁评估[9]。
2 数据融合准则与方法
数据融合技术的核心研究内容就是融合准则和算法研究。数据融合准则通常指采用的融合数据满足观测目标变化规律的原则,以融合数据满足观测目标变化规律的程度为依据,满足规律的程度越高,则对融合结果的影响越大[10],反之,则越小。目前,常用的数据融合算法基本上可以分为随机类方法和人工智能类方法。随机类融合方法包括加权平均法、多贝叶斯估计法、卡尔曼滤波法等;人工智能融合方法包括神经网络、模糊逻辑推理、遗传算法、粗集理论等[11]。
对于火箭助推水雷而言,其水下高速弹道运动具有加速度大、速度快、弹道时间短的特点,其观测采样周期相对较低,具有自身的复杂性和特殊性[12]。因此,水下高速弹道测试数据的融合需要考虑其运动变化规律,数据融合方法需既具有鲁棒性又有很强的并行处理能力。本文采用满足水下高速弹道运动规律的测试数据作为融合准则,并根据该运动规律,采用加权平均数据融合作为算法,探讨构建水下高速弹道测试数据融合算法的可行途径。
3 多信源测试数据融合
3.1 数据的时空对准
在对测量数据进行融合之前,首先需要对测量数据进行时空对准,包括空间转换和时间同步[13]。空间转换,对于单平台而言,同一平台不同坐标系的信息要转换到同一坐标系之下,对于多平台而言,在进行多平台融合时,需要将不同平台的信息转换到融合确定的公共坐标系之下[14]。如果不能有效进行空间转换,则使得多个信源的信息无法进行关联融合,造成信息冗余,使得融合结果不可信。
时间同步,是指将不同步的传感器信息同步到相同时刻[15]。通常多信源信息的不同步包括传感器自身获取信息的不同步(采样率不一致等),以及网络化、分布式带来的信息传输滞后。
3.1.1 空间转换
在测试系统中,目标测量所在坐标系与数据处理所在坐标系通常是不一致的。此时,就需要将各传感器(此处即为捷联惯性测量装置)需要融合的数据信息进行坐标变换,统一到同一坐标系中[16]。为方便计算,提高测试精度,本文采用大地坐标系作为数据处理及融合的坐标系,并将各信息源数据转换为该坐标系下的数据。
考虑到水下高速弹道运动的特点,为减小测量误差,提高系统测量精度,为数据融合提供有效信源,本文主要采取以下2方面的措施:1)在统一坐标系的基础上,需要对多传感器(此处即为捷联惯性测量装置)之间的安装误差进行标定;2)在满足系统工作时序的要求下,多传感器提前进行初始对准,延长初始对准时间以提高初始对准的精度。
3.1.2 时间同步
时间同步的任务就是将来自于不同传感器、不同采样周期下的测试数据对准到统一的融合时间间隔下。内插外推法和虚拟融合法是2种常用的时间同步算法[17]。
在本文的测试系统实际使用过程中,采用同一控制终端给 2个捷联惯性测量组合同步下发初始对准、启动测试指令的方式,保证了其测试起点的时间同步。对于采集的多信源数据,由于测试设备的采样周期可知,本文采用虚拟融合法。
虚拟融合法的步骤如下[18]:假设有 2类传感器,分别为传感器Ⅰ和传感器Ⅱ,其采样周期分别为τ和T,且两者之比为整数,即τ T=n。如果传感器Ⅰ对目标状态最近一次更新时间为(k -1)τ,下一次更新时间为 K = ( k - 1 )τ+ nT ,传感器Ⅱ对目标状态最近一次更新时间(k - 1 )T,下一次更新时间为kT,这意味着在连续2次目标状态更新之间,传感器Ⅱ有n次测量值。于是,可采用最小二乘法,将这n次测量值融合成一个虚拟的测量值,作为时刻K传感器Ⅱ的测量值,再和传感器Ⅰ的测量值进行融合。

3.2 基于精度的加权平均数据融合
本文采用的基于精度的加权平均数据融合方法,分别对不同来源的测试数据进行不确定度分析,再以所得出的不确定度作为权值参考进行加权融合,加权融合结果可作为最终的测试数据融合结果。
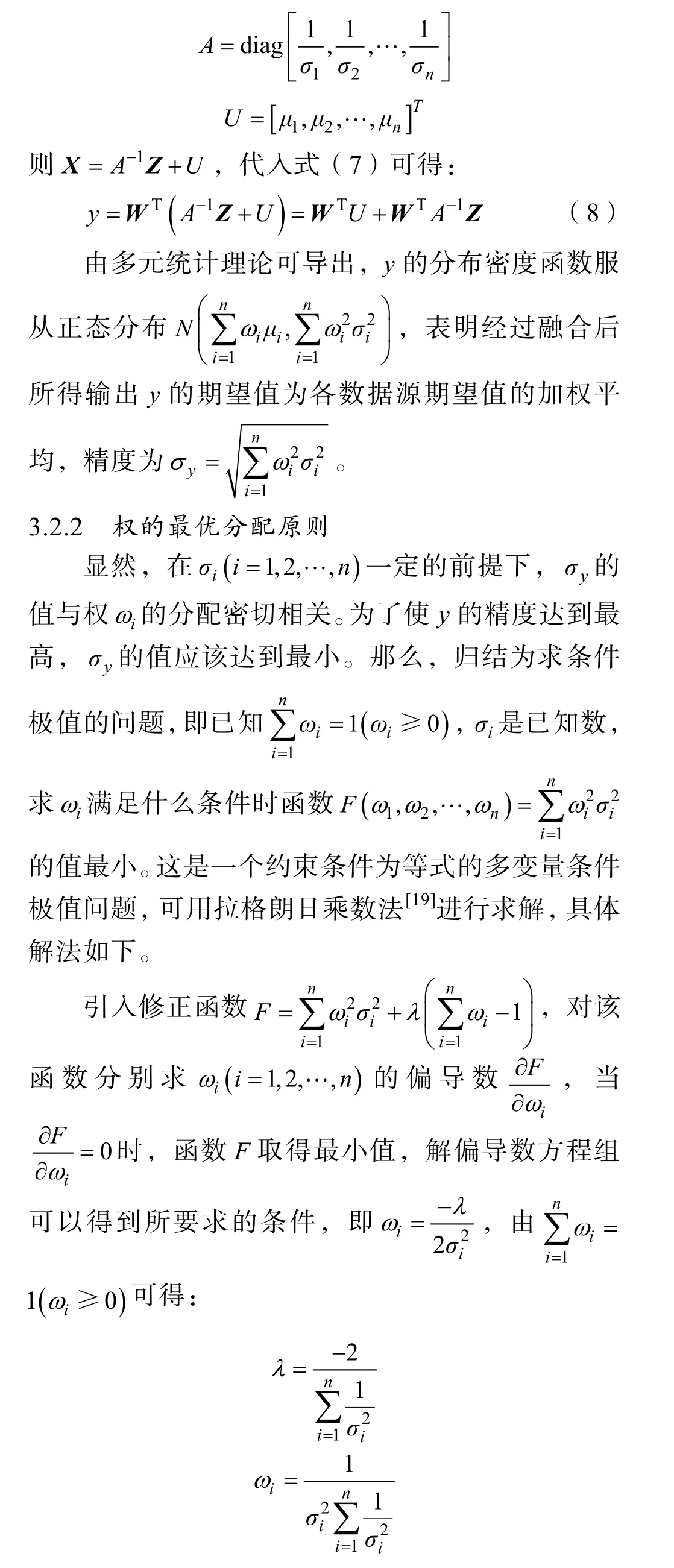
3.2.1 加权平均法进行数据融合时权对融合精度的影响
加权平均法是求各个数据源输出数据的加权平均值,若第i个数据源的输出为xi,其权为ωi,所有n个数据源输出数据的融合结果为

将上式代入σy中可得多源数据融合后达到的最高精度:
3.2.3 公式分析
如若几个数据源的精度有高低之分,σi均方根的最小值和最大值分别为σmin和σmax,

上式表明:采用权的最优分配方法后,精度差的数据源参与数据融合后都有利于提高测量的精度。这一点与其他方法有本质的区别。采用其他方法信息融合时,一个精度很差的数据源有可能使得融合结果精度变差。这一点具有非常重要的实际应用价值。
3.2.4 结果分析
为了验证上述计算方法对于水下高速弹道测试数据处理的可行性及精确程度,以某型水雷高速弹道测试系统中 2台捷联惯性测量装置作为数据源。数据源1测得的目标速度、航向角为v1、ψ1,数据源 2测得的目标速度、航向角为v2、ψ2,其均方根误差分别为(σv1,σφ1) 和(σv2,σφ2)。采用加权平均法进行数据融合结果如下:
图2和图3给出了采用该方法得出的某型水雷高速弹道速度、航向角试验值和融合结果比较。其中,虚线为第1组试验值,点画线为第2组试验值,实线为融合值。从图中可以看出,该数据融合处理算法对提高高速弹道测试的平稳性及精度具有很好的性能。

图2 速度试验值与融合值比较图Fig.2 Velocity comparison chart between original data and fusion data
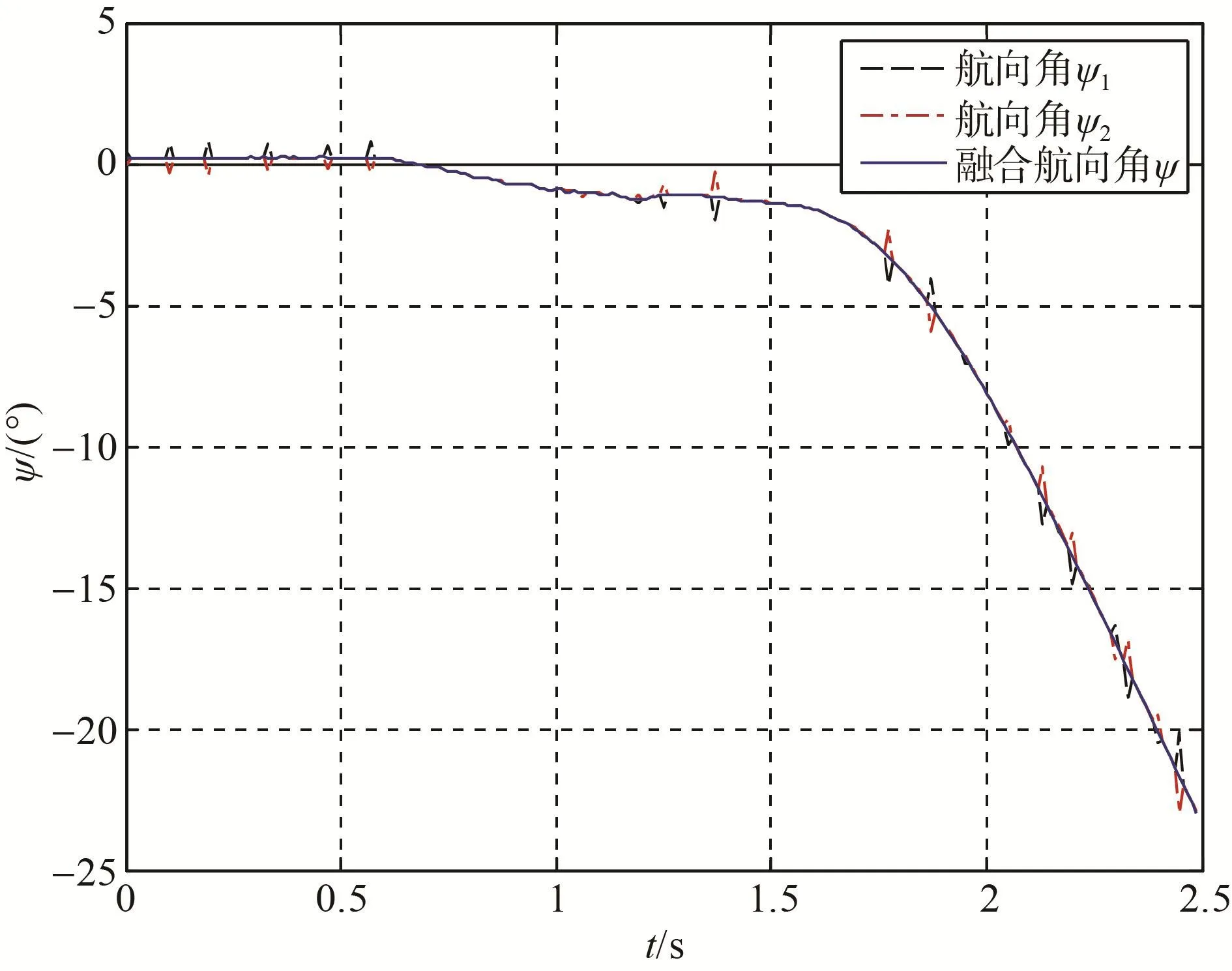
图3 航向角试验值与融合值比较图Fig.3 Course angle comparison chart between original data and fusion data
4 结束语
本文首先对数据融合技术的原理及关联方法进行了描述,进而针对水下高速弹道测试的数据特点进行分析,探讨了适用的该运动规律数据融合准则和基于不确定度的融合方法。以2台捷联惯性测量装置的数据为例,说明了数据融合技术在水下航行器高速弹道测试中的应用,从融合结果来看,多个信源测试得到的信息经数据融合后提高了对目标的测试精度,是一种方差最小意义下的最佳数据融合方法。该方法具有较好的可行性、适应性、有效性,可形成信息完整、易于分析、单一的测试结果,提高了复杂测试系统的结果可信度,具有良好的工程应用参考价值。
