并联加工型机器人的坐标变换方法及反解推导过程
2021-11-03龚念清
周 来,龚念清
(九江职业技术学院,江西九江 332007)
0 引言
对RBT-6T02P-B 型并联加工型机器人进行位置分析,明确输出与输入两者之间的位置关系,是目前机构运动分析中最为常见的一种工作形式,并能完成工作空间布局、分布、受力、加减速、误差等分析工作[1]。因该RBT-6T02P-B 型并联机构具有相当复杂性,所以该机构的位置分析同单环空间机构的位置分析相比,要相对复杂(图1)。将并联机构主动件位置的参数设为定量,对机构输出位置和形态进行分析,得出正解;反之,输出的位置和形态作为定量设定,求解主动件位置可进行反向分析得解[2]。求解过程中,当输出的位置不同,求解的结果也不同,并且还与关联、串联关系存在一定的相关性:串联具有正解相对容易、反解则相对较难的特点,而并联却具有反解相对较易、正解却相对复杂的特点。本文以6-SPS 并联型机构为例,详细分析并联机构位置的反解方法[3]。
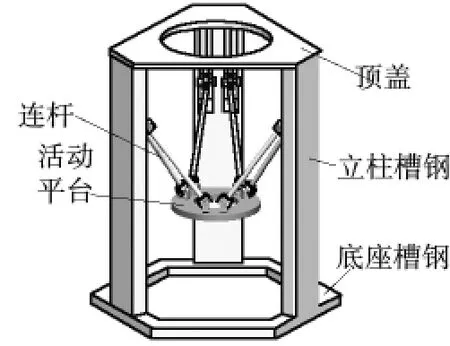
图1 RBT-6T02P-B 型并联加工型机器人
1 并联机构各坐标的变换和反解分析过程
6-SPS 并联机构由两个平台构成,分为上下结构,两个机构之间分为6 个分支,各分支之间相互关联,并每个分支终端设有球铰,平台中点设为移动副。上平台的空间位置和姿态变化,是通过驱动器推动移动副移动、改变各杆的长度而得来的[4]。因此,该机构的位置反解是通过已定的上平台在空间位置和姿态的参数,计算杆长(即动副位移)。为了更好地了解并联机构各坐标的变换,先在上、下两平台上建两个坐标系(图2),上平台建立动坐标系P-X′Y′Z′,下平台固定O-XYZ 坐标系,动坐标系中的各向量R′,可以通过坐标的变换始终固定在坐标系O-XYZ中的R 上。
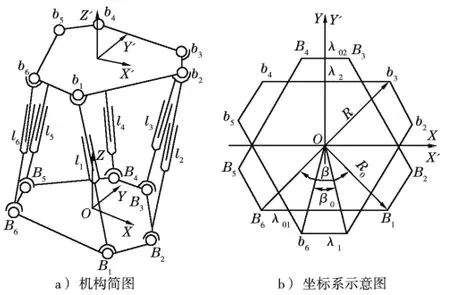
图2 6-SPS 并联机构
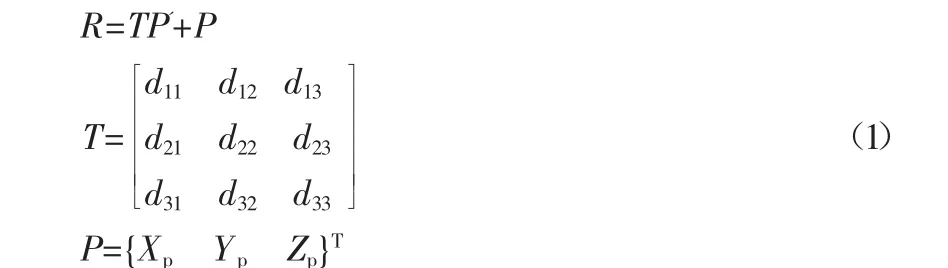
式(1)中,T 为并联机构上平台姿势方向余弦矩阵,动坐标系中的第1、2、3 列中的X′、Y′和Z′均在O-XYZ 中方向余弦上固定,两坐标之间的并联设定为P,作为平台的参考点(即动坐标系P-X′Y′Z′的原点在固定坐标系O-XYZ 中的位置矢量)[3]。
式中,cα=cosα,sα=sinα。并联机构两平台的铰链点(bi,Bi,i=1,2,…,6)在坐标系中的坐标值,是通过机构各结构尺寸利用几何关系计算而来的,通过式(2)能够解得并联机构各铰链点在固定坐标系O-XYZ 中的坐标值[5]。这时6 个驱动器杆长矢量Li(i=1,2,…,6)可在固定坐标系中表示为:

因此,该并联机构的位置反解计算方程式为:

并联机构的6 个驱动器位移的求解,可通过该并联机构基本尺寸、上平台位置及姿势的参数,利用上式方程计算得出。由此,该6-SPS 类型的位置反解方法比较容易,该方法也可用于其他相似的并联机构的位置求解。
2 示例
以RBT-6T02P-B 型并联加工型机器人为例,设定机器人结构参数后,建立反解坐标,具体参数如下:自由度为6;驱动杆长l=300 mm;上平台外接圆半径R=216.4 mm;下平台外接圆半径r=85 mm;各驱动杆行程150 mm;以Z 走向为驱动作业方向;驱动最小伸长量176.54 mm,最大伸长量328.54 mm。
在解平台空间位置关系时,应先建好动、静坐标系,动、静两坐标系的各原点O 和O′分别位于并联机构的下平台和上平台两中心(图3)。
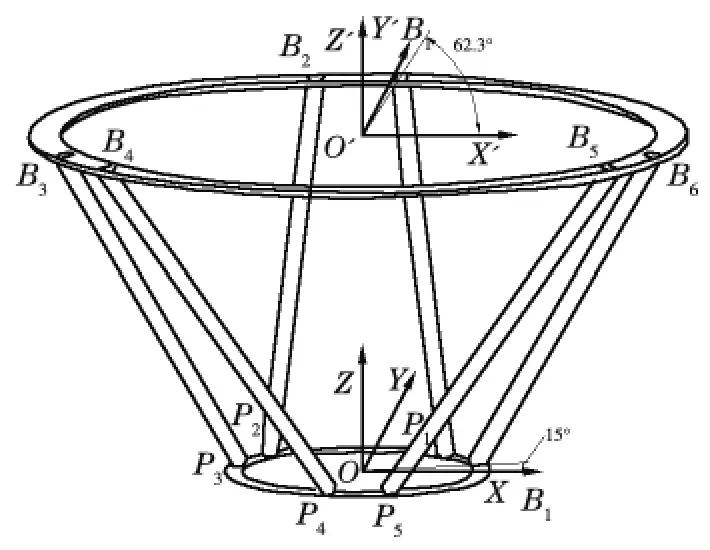
图3 并联机器人反解动、静坐标系
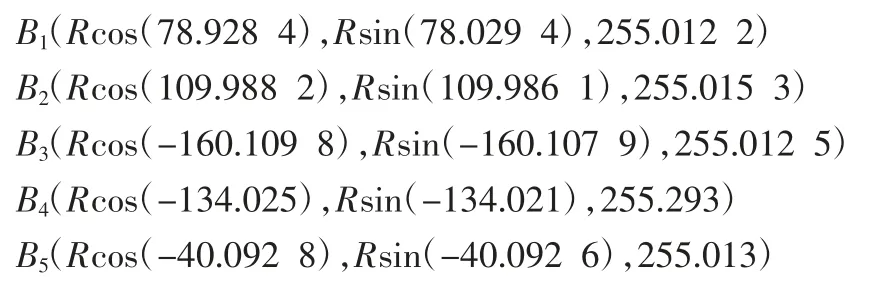
得出上平台铰点坐标:

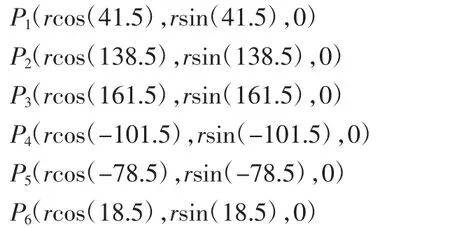
下平台铰点坐标:
通过齐次坐标和齐次变换矩阵分别表示点在空间的位置和平移及转动,目的是更好反映空间某点的变换。
设以p 点作为笛卡尔坐标,坐标点位为(x、y、z),四维列向量T 表示p 点的齐次坐标驱动,即[x,y,z,1]为坐标点。这种设定方式,将空间点位置和矢量方向作为定量不变,当第4 个元素为0 时,此时表示坐标的驱动方向,反之,则表示驱动的输入位置。
假定空间中有定、动两个坐标系,如果动坐标系先沿定坐标系X、Y、Z 分别平移XP、YP、ZP,接着在新坐标系下绕x、y、z 轴分别旋转α、β、γ 后,则坐标矩阵为:
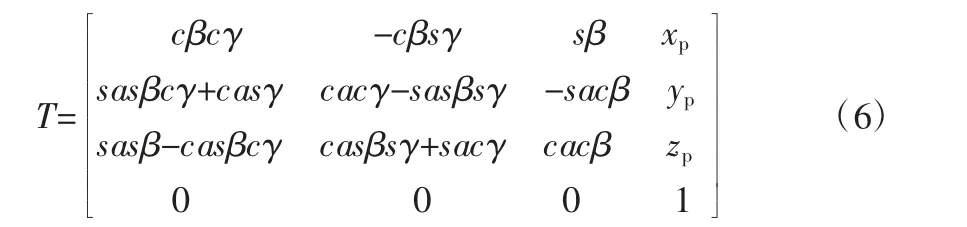
由此经平移和转动后的动坐标中P′点,在定坐标系中的齐次坐标P 为P=TP′,旋转和平移都能够用该矩阵表示,最终与式(1)的结果相同。
并联机器人驱动杆的原长是利用公式和初始状态坐标值算出。
P′的各点的坐标值是由公式P′=TP 算出,再通过公式求出驱动杆的长度。
因Bi点的Z 坐标变化等同于机器运动时的驱动方式,且X、Y坐标不变,故令li=,此时,Bi点的Z 坐标变化即可计算求解。由此,可以根据输出端位置确定输入端的原始位置,即完成反解过程。
