深水网箱清洗技术及装备研究进展
2021-11-03宋协法褚云冲孙佐梁
宋协法,孙 跃,何 佳,褚云冲,孙佐梁
(中国海洋大学水产学院,山东 青岛 266003)
近年来,随着科技的进步,海水设施养殖发展迅速,在丰富中国居民膳食营养供给、提升渔业产品贸易竞争力、稳固国家粮食保障供给等方面起到了举足轻重的作用[1-2]。中国海水网箱养殖始于20世纪70年代,多集中于港湾内及近岸海域[3-4]。随着近海环境污染压力的加大,在国家及沿海地方政府的倡导和支持下,网箱养殖技术与设施装备取得了长足进步,近岸小型网箱逐渐被深水网箱所取代[5]。
深水网箱网衣材料多为聚乙烯或尼龙,这些网衣材料本身无毒并且具有比表面积大等特点,由于其长时间浸泡在海水中,污损生物容易在网衣上繁衍滋生,主要为贻贝、海鞘、藤壶、水螅和藻类等。中国沿海已有记录614种污损生物,其种类与设施结构、材质、养殖季节和地点等有关[6]。网衣附着堵塞造成网箱的滤水性能差、网箱内外水流交换不畅、溶氧降低等问题[7-8],严重影响了养殖鱼类的存活率,影响鱼类的生长速度、产量以及品质[9-10]。此外,在养殖投饲过程中,养殖鱼类未经消化的营养物质以及鱼类的排泄物也为藻类提供了充足的养分,加剧了网箱网衣上污损生物的生长,增加网衣的负荷,从而加重了网箱的整体质量。对于一些贝类(如贻贝、扇贝、牡蛎等)附着严重的海区,贝类的尖角还会割断网衣甚至对网衣结构造成破坏,严重影响到网箱的安全性及使用寿命,增加了鱼类逃逸的风险,造成一定的经济损失[11-13]。此外,污损生物携带的病原增加了养殖鱼类的致病风险。如在双壳贝类中分离出日本牡蛎JOV-1病毒[14];一些贻贝的粪便含有弧菌Vibrioanquillarum,能使网箱养殖的鳕鱼感染弧菌病并导致死亡[15]。目前,清除网箱污损生物的成本较高,可达养殖成本的5%~10%[16]。网箱网衣的防附着已经成为海水网箱养殖业亟待解决的一大难题,也是设施养殖的重要研究方向。
1 网箱防附着的方法
1.1 网衣防污方法
1.1.1 防污涂料法
早期,有渔民在网衣上涂抹沥青以防止藻类附着[17]。目前,国内外许多科研单位对网衣防附着涂料进行了研究。日本在牡蛎养殖网箱上涂抹一层碳酸钙粉或其他钙化合物的方式以增强网具的柔性和防堵性,提高网具的使用寿命[18]。Edwards等[19]评估了5种涂料处理污损生物的能力,结果表明,铜涂料依然是目前较为有效地防止网衣生物污损的处理手段。Murat等[20]的研究也表明采用铜合金网衣能够使网衣长时间保持清洁。Ashraf等[21]发现,利用纳米氧化铜与聚乙二醇甲基丙烯酸酯水凝胶浸泡尼龙网衣,能够显著提高网衣的防附着性能。李旭朝等[22]通过海上试验评价防污涂料的综合性能,测试结果表明其试验网衣的防污周期可达10个月。许文军等[23]试验筛选了21种市售材料,发现仅有日本油脂公司2#材料具有相对较好的防附着效果。由于污损生物种类繁多,养殖海况差异大,只有针对性地选择防污涂料,才能有效地防附着。目前市售防污涂料价格普遍较高,防污周期较短,对养殖鱼类的危害及环境污染等问题尚不明确。因此,研发和利用成本低、性能高、无污染的防污涂料也是海水网箱养殖发展的主要研究方向之一。
1.1.2 增大网目法
适当增大网目,能够增强网箱的滤水量,减少生物附着。如网箱养殖真鲷,网目为1 cm的网箱中很容易阻塞网孔,若网目增大到1.5 cm,就可以大大提高网孔的滤水性能[24]。但增大网目的前提是要相应地提高养殖鱼类的规格。因此,提倡北方冬季在室内将小规格苗种养到大规格苗种,春天后将大规格苗种放入网箱养殖的“陆海接力”养殖模式。
1.2 网衣清洗方法
1.2.1 人工清洗法
若网箱网衣上滋生的是悬浮性有机附着物,一般可在水中直接清洗。操作人员站立在网箱框架旁,可以用毛刷等清理[25-26]。若是可以分箱并箱,则将网箱内的鱼全部赶入另外设置的网箱内,把旧的网箱运到岸上进行清洗,检查网箱无破损后再重新组装,这种方式较上一种清洗彻底,但相对劳动强度大。若附着的是较难清理的污损生物,而又不能分离网箱单独清洗,则需潜水员定期潜入水中,手持高压水枪,利用其产生的高压水射流清洗网箱[27]。此法劳动强度低,并能快速清洗网箱,但这种方法必须配有专业的潜水员,人工投入成本较大。
1.2.2 生物清除法
网箱网衣极易被藻类或低等的无脊椎动物附着,可以在网箱中养殖一些喜食、易食藻类或低等无脊椎动物的鱼类,从生物防治的角度来解决污损生物的附着难题。吕旭宁等[28]探讨了适温条件下黄斑篮子鱼(Siganusoramin)对北方网箱养殖附着藻类的生物清除作用,研究表明该鱼种对网衣附着藻类有较高的清除效率,可以作为清除网衣附着生物的工具种。此方法既环保又不产生污染,最大程度地减少了网衣清洗的次数,降低了生产成本,并且还可以带来额外的养殖收益。但目前选择效果较好的“生物清洁工”鱼类比较困难。一些海洋微生物也被考虑用于防治网箱污损生物,如细菌和硅藻产生的生物活性化合物不仅能抑制微生物的附着和生长,还能抑制无脊椎动物幼体以及一些大型藻类孢子的生长[29]。Balasubramanian等[30]提出海洋生物膜细菌产生一种防污化合物对抑制污损生物的生长效果显著。
1.2.3 机械清洗法
机械清洗法主要通过驱动单元带动含毛刷的转盘对网衣进行擦洗,或使用水泵和高压水枪产生的高压水射流冲洗网衣使附着物剥离。该方法既可以通过机动船将网箱提出水面后操作,也可将该装置的清洗单元放入水下直接清洗,其工作效率是人工清洗的5~6倍[31]。目前挪威及其他欧美国家也多采用该方法[32]。
2 网衣清洗装置
2.1 移动式水下网箱清洗装置
高压水射流与物理摩擦能有效去除不同种类的附着物[33]。早期设计的清洗装置多以便于人工操作的轻型移动式网箱清洗装置为主。这种类型的装置通常由1台独立驱动的发动机提供动力,由工作人员手持连接清洗头的操纵杆对网箱进行清洗[34]。宋协法等[31]设计了通过高压水泵产生高压水流,高压水流产生的反作用力驱动圆盘及毛刷旋转以对网衣进行清洗。黄小华等[35]利用喷嘴产生的高压水射流驱动叶轮旋转进而带动清洗盘转动来实现对网衣的清洗。戴建洪[36]通过交叉排布的2个喷嘴驱动叶轮高速旋转并带动毛刷转动,同时利用高压水射流压力和毛刷,实现对网箱的双重清洗。这种类型的移动式网箱清洗装置结构简单、操作方便,工作人员手持操纵杆即可实现对网衣的移动式清洗,有效清除网衣上的污垢和污损生物,极大地减轻工人的劳动强度,提高了清洗效率,但在设备的可操作性及自动化方面还有待于进一步提高。日本的富士公司为了减轻渔网清洗作业的劳动强度,研制了鼓轮式自动渔网清洗机,利用鼓轮转动时产生的离心力使附着在网衣上的贝壳和海藻脱离[37]。常见移动式水下清洗装置如表1所示。
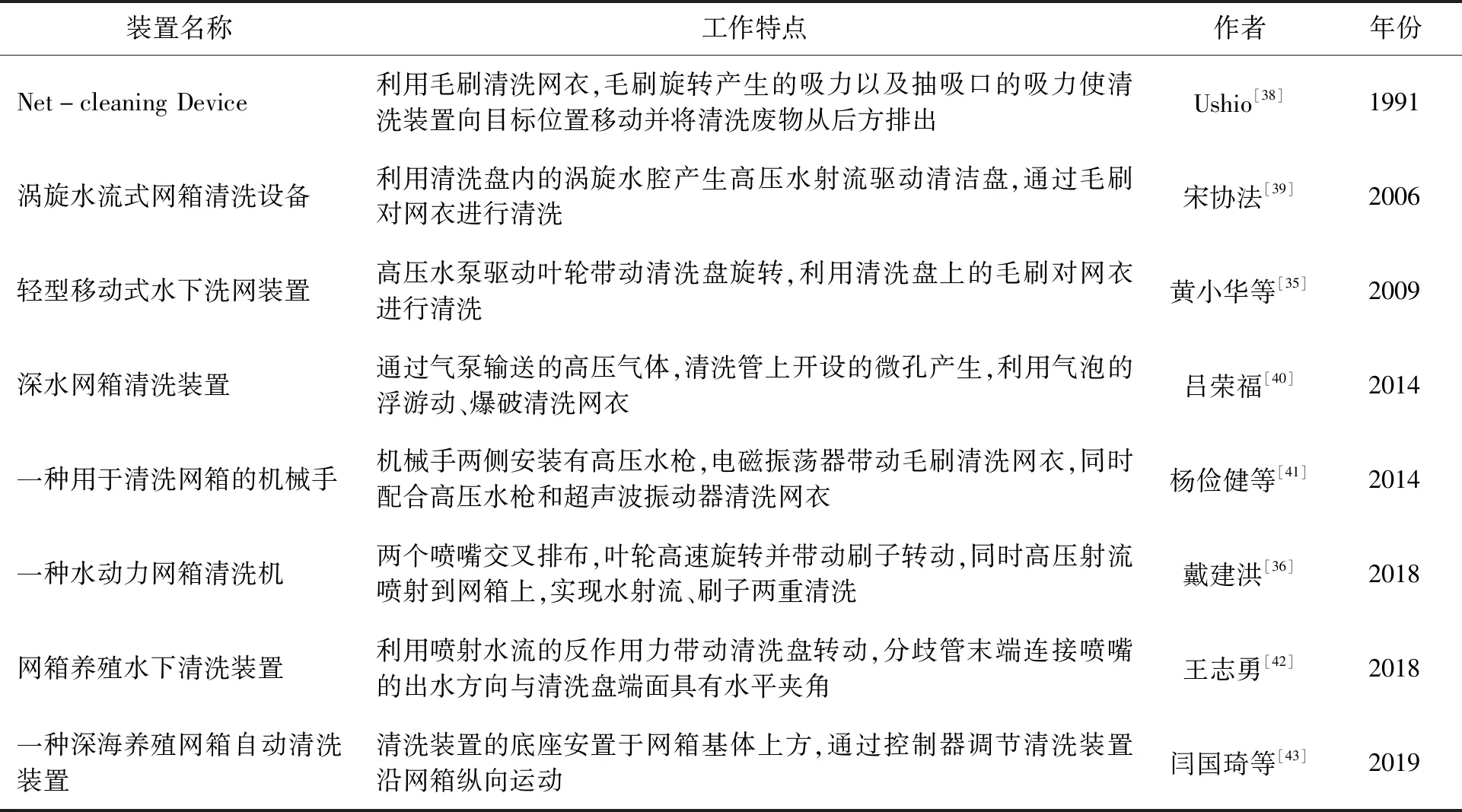
表1 移动式水下网箱清洗装置Tab.1 Mobile underwater cage cleaning devices
2.2 潮流动力型网箱清洗装置
潮流动力型网箱清洗装置是利用潮汐和波浪的作用,使网衣与毛刷产生相对运动,达到自动清洗的效果[44-45]。此类装置合理利用大自然的能量,既不需要养殖船,也不需要人工操作,降低了人工成本,但该类清洗装置固定安装复杂,且容易对网箱造成伤害。例如:敖志辉[46]在环形网箱内加装一个尺寸略小于网箱的圆环形框架式网刮,在潮流的作用下,网刮相对网箱产生上下起伏和前后左右的运动,并在潮流冲击下自动靠紧网箱,实现对网箱的自动清洗。冯静等[47]发明的网衣清洗装置则是利用潮流的作用带动扇叶旋转,使扇叶边缘的网刮与网衣相互摩擦,达到自动清洗网衣的目的。伍杰等[48]设计了一种用于网箱网衣的底部清洗装置,在网箱底部设置一个附有清洗毛刷的旋转轴,在海流的作用下,毛刷不停地对网箱底部的网衣进行清洗。常见潮流动力型网箱清洗装置如表2所示。

表2 潮流动力型网箱清洗装置Tab.2 Tide power type cage cleaning devices
2.3 轨道式网箱清洗装置
网衣属柔性结构,必须保持毛刷与网衣的良好接触或喷嘴与网衣之间适宜的距离,才能达到良好的清洗效果[49]。通过水射流对网衣进行清洗,射流产生的冲击力会使清洗盘远离网衣,降低清洗效率。轨道式网箱清洗装置可使清洗装置沿轨道行走,保证清洗装置与网衣的有效清洗距离,提高清洗效率。Andersen[50]在网箱外侧和清洗单元上均安装有磁吸式框架,清洗单元可沿着框架轨道滑动,利用高压水射流和毛刷对网衣进行清洗。薛洋洋等[51]在网箱框架轨道上设置了清洗程序,清洗单元根据程序沿框架轨道移动清洗网箱。张祖禹[52]设计的轨道安装在网箱内部,清洗单元沿网箱内壁移动,可将污损生物直接排出网箱。

表3 轨道式网箱清洗装置Tab.3 Rail type cage cleaning devices
2.4 水下清洗机器人
水下清洗机器人具有操作简单,安全可靠,自动化程度高等优点[53]。其主要由控制系统、运动模块和清洗单元等构成。水下清洗机器人的控制系统可以根据不同的污损生物类型来设置和调节,如清洗的速度和时间等。通过水下摄像机向操作人员反馈网衣附着及清洗效果。例如:Baba[54]发明的网箱清洗机器人,由清洗单元、运动装置、水下摄像和照明装置等组成。该机器人可通过反馈及时调整潜浮姿态和螺旋推进,可改变机器人清洗轨迹和运行方向,利用高压水射流技术对网衣进行清洗。刘冠灵等[55]设计的履带式水下清洗机器人,利用高压旋转水射流技术,将高压水通过清洗盘分配至歧管,实现高压旋转式射流清洗,同时,利用反向喷射水流的反作用力,使整个机器人紧靠网衣表面。Lindgren[56]将导航系统应用到水下清洗机器人上,使其能够在网衣上沿设定轨迹移动。此外,该设备还应用了螺旋桨反转技术,便于越过障碍从而实现高效清洗。AKVA公司售卖的清洗机器人FNC8较为常见,搭载了多种传感器原件和摄像系统,每小时可以清洗网箱网衣5 000 m2,工作环境最深可达100 m,日本洋马公司推出的NCL型水下清洗机器人[57]技术参数如表4所示。常见水下网箱清洗机器人见表5。
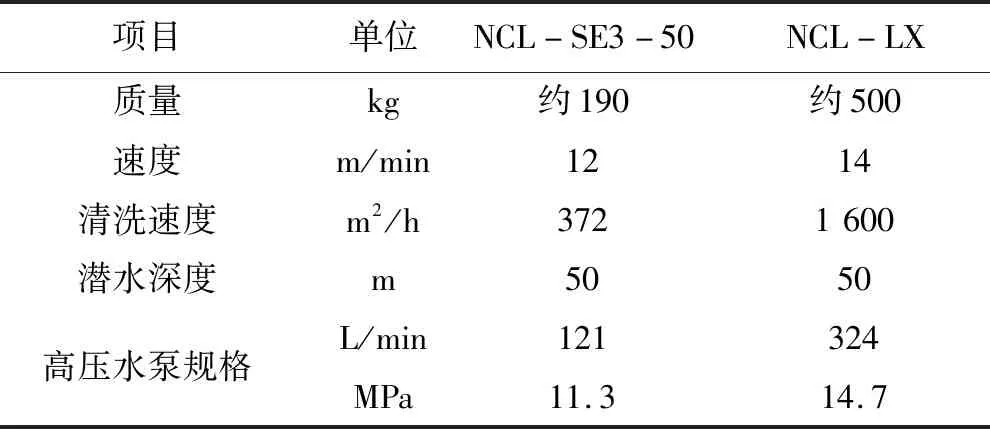
表4 NCL型水下清洗机器人技术参数Tab.4 Technical parameter of NCL underwater cleaning robots

表5 水下清洗机器人Tab.5 Underwater cleaning robots

(续表)
3 中国网箱清洗装备的研究进展
3.1 网箱清洗关键零、部件的研究
3.1.1 高压水泵
国内对于船舶壳体表面清洗设备的研究应用较多,而对深水网箱水下清洗的生产应用很少。目前市售产品多采用高压水射流清洗系统,即以水为介质,通过高压水泵形成高压,再经过特制的喷嘴喷射出能量集中、速度高的水射流,对网衣上的附着物进行冲击以达到去污除垢的目的[27]。高压水泵是清洗系统重要的零部件之一,是系统运行的动力装置[66]。中国大部分深水网箱养殖海域离岸较远,岸电无法满足网箱清洗装置的动力需求,因此多使用发动机(汽油型、柴油型等)带动高压水泵,将发动机的机械能转变成流体的动能[67]。水泵按不同的工作原理可分为往复泵、柱塞泵、离心泵等类型,其中柱塞泵具有高压力、高效率的优点,被广泛应用于高压清洗设备[68]。20世纪80年代初期,中国开始发展的小型清洗机,其水泵的最高工作压力不足6.0 MPa,形成高速和高压水射流成为这一时期的技术难点[69]。研究表明,高压柱塞泵的工作压力低于18 MPa时清洗效果较差,采用AR高压柱塞泵的额定工作压力应大于20 MPa[70]。目前,国内高压泵的工作压力已突破200 MPa,泵压也不再成为限制因素[67]。
3.1.2 喷嘴
喷嘴是流体射流的发生元件和网衣清洗的执行元件。高压水经过喷嘴,转换为高压力高流速的射流,连续不断地作用在网衣的表面,实现对网衣的清洗[71]。研究表明影响喷嘴清洗效果的主要参数是喷嘴形状、结构和喷嘴直径等。李根生等[72]根据弹性力学和流体力学理论推导了非接触式密封的变形、漏失量、压力分布的基本关系和旋转速度计算公式,从理论上分析了密封参数、喷嘴参数和水力参数对旋转速度的影响。蒋彧澄等[73]利用面元法对锥形喷嘴的内部及射流区域内的流场进行了计算和试验分析,表明了喷嘴的几何结构对淹没空化水射流冲蚀性能的影响关系。胡昱等[71]基于能量方程,推导喷嘴的结构参数公式,并计算出喷嘴的最佳直径为2.77 mm、最佳长度为8.31 mm,该条件下的喷射速度v=133.4 m/s、射流流量q=48.3 L/min 、射流功率N=14.86 kW、射流反冲力F=106.5 N。王志勇等[27]采用连续性方程和能量守恒定律确定了工作压力20 MPa、额定流量15 L /min、额定功率5.5 kW的水下清洗装置最佳喷嘴直径为2.7 mm。杨国来等[74]采用Fluent中的Mixture模型对锥形喷嘴和锥直形喷嘴进行仿真分析,得出射流速度最大时,锥直形喷嘴长径比为2~3。张小明等[75]依据水力学公式计算出歧管式高压水射流水下洗网机旋转的射流角速度和射流打击力,结果表明旋转射流的打击力随偏转角增大而递减,随射流压力、旋转半径和喷嘴孔径增大而增大,旋转的射流打击力比非旋转的射流打击力更有利于提高清洗网衣的效率。宋协法[9]采用Visual basic6.0编制了的一种适合网衣清洗设备设计计算的软件,可实现对清洗盘喷孔直径、转动力矩及转速的设计,通过程序运行,得到喷水孔的直径d=1.043 cm,曲率半径为R=5.216 cm,圆盘转动力矩Lz1=14.37 N · m,圆盘的转速ω=40.48 rad/s=386.6 r/min可以满足网衣清洗的要求。上述研究为喷嘴形状结构、直径、孔径长度及射流速度的应用和优化改进提供了科学依据。
3.1.3 毛刷
毛刷是网箱清洗装置的执行元件之一,其材料多为纳米碳纤维。毛刷被固定在工作面盘上,并随工作面盘一起转动,实现对网衣的摩擦式清洗。适合的毛刷才能清除网衣表面的污损生物,避免损害网衣。毛刷形状有十字形、三层形、波纹形状等,圆形截面毛刷的接触面积“基本一致”,稳定性高。为确保清洗刷与网衣的接触状态,建议选择圆形截面毛刷。宋协法等[9]通过海上清洗试验发现:规格为15 mm的毛刷,其相对硬度较高,清洗效果较好;毛刷方向与圆盘方向垂直时,清洗面积较大。提升清洗盘和毛刷的使用寿命,减少更换频次也是网箱清洗装置的重要研究内容。林登辉等[76]对清洗单元的毛刷进行优化改进,在传统毛刷的基础上,设计了一种有梳齿状的环形自净装置,通过毛刷在伸缩过程中来回与梳齿接触,使毛刷上残留的污损物脱落,达到自动清洗毛刷的效果,这种装置有效地提高了毛刷的使用年限,降低频繁更换毛刷所引起的费用与劳动量。
3.2 水下清洗机器人研究进展
3.2.1 清洗单元的优化
近年来,随着水下机器人技术的蓬勃发展,越来越多的网箱清洗技术与之结合,形成了一种新的水下网箱清洗方式—水下清洗机器人。与传统的网箱清洗装置相比,水下清洗机器人在自动化、多元化、智能化方面具有明显优势,成为未来网箱清洗装置发展的趋势。
清洗单元是水下清洗机器人的执行模块,也是网箱清洗装置的核心部件。传统清洗单元执行元件是高压喷嘴和毛刷,机器人技术的应用为清洗单元增加了更多的可能性。目前关于清洗单元的改进的数据支持较少,多是一些专利。如刘飞等[77]设计对网箱清洗机器人的清洗单元进行优化,其设计的新型机械手两侧安装有高压喷嘴,中部安装有超声波振动器,表面附有毛刷。工作时,工作船上的高压水泵产生高压水,通过机械手臂的高压喷嘴、超声波振动和毛刷协同清洗,使网箱网衣实现深层次清洁。机械臂和基盘之间装有360°旋转的接头,使机械臂可以在空间内任意角度移动,没有清洗死角。由于机器人技术的模块可以拓展,因此可以直接整合现有水动力参数,如将喷嘴的最佳效率参数应用到清洗机器人上。水下清洗机器人也能整合多种类型喷嘴技术,提供不同的喷射方式,如居中射流、分散射流、旋转射流等方式或其中几种的组合形式。在清洗单元上安装多种传感器能及时调整水射流与网具的距离,实现高效清洗,同时也避免高压清洗对网具的损坏。
3.2.2 驱动方式
水下清洗机器人的驱动方式是影响网箱清洗效率的重要因素。莫嘉嗣等[60]将柔性绳索并联连接在网箱本体与清洗单元之间,通过绕线电动机驱动电缆,在多条柔性绳索并联支链的协调配合下,使清洗单元在网箱内进行水下三维运动。相较于单一电缆的串联驱动,多根驱动电缆相互约束,增加了深海网箱的自动化清洗的水下稳定性和精确度。一些专利介绍了磁吸式防滑双同步带技术,分别在清洗单元和网箱上设置主动轮和从动轮,外部包覆防滑双同步带,使同步带与同步轮啮齿状啮合。通过驱动主动轮带动从动轮,以实现清洗单元的运动,提高水下清洗机器人的稳定性和工作精度[79]。但关于该技术产品的应用仍未出现。
3.2.3 运动控制
中国早期设计的运动控制为单根电缆连接的垂钓式清洗装置,依靠工作船上电缆的上下伸缩实现不同深度的清洗作业,需要靠人工辅助操作,自动化程度较低。且易受到水流的影响,定位不准确,清洗单元难以实现实时跟随运动,其运动往往滞后,灵活性受限[65]。为了改进串联驱动的不足,莫嘉嗣等[60]设计了多根电缆并联驱动的清洗机器人,通过运动控制器控制4条柔性绳索协调配合,使清洗单元在网箱内进行水下三维运动,增加了网箱清洗的灵活性和精确度,自动化程度较高,且运动轨迹可按照需求设定。水下机器人还可以通过利用双浮筒调整水下潜浮姿态,利用螺旋推进器实现清洗装置的直行、转弯等运动,以实现对网箱各个角落的清洗。此外,通过水下成像系统地实时监测,远程操控水下清洗机器人的行动路线,可以定点高效地进行网衣清洗,以达到节约能源,提高清洗效率的目的。
4 结语
传统水产养殖网箱清洗依靠人工完成,劳动强度大,危险性高。生物清除法降低了人力成本,兼具生态和经济效益,但一些防治生物如混养鱼类有特定摄食喜好,不能彻底解决污损生物的附着问题。防污涂料也是解决污损生物的重要方向,其成本较高且存在污染和危害养殖生物的风险。相较于上述方法,机械清除法更容易实现。早期的机械清除法主要采用轻型移动式水下清洗装置,由工作人员潜水操作完成。随着时代的发展,网箱清洗装置实现了轨道化和自动化,减轻了劳动强度,缩短了清洗周期。目前开发应用的网箱清洗机器人,自动化程度较高,清洗效率较高,但仍需远程操控,且对技术人员的专业素养要求较高,难以实现智慧渔业。GPS定位技术、精密传感技术的发展,为实现智能化、无人化提供了可能。未来,清洗机器人可以精准确定水下污损位置,实时反馈目标位置的污损等级;利用大数据技术,挖掘海量数据,对大量数据整合、处理并实时反馈,根据算法得出当前环境的最佳清洁方式、最适清洁力度等智能有效地制定清洗方案。人工智能的发展加速了相关领域技术上的整合,通过机器学习,挖掘数据,加快推进前沿技术的应用,使之服务于深水网箱清洗行业中去。鉴于海洋环境的复杂性,网箱清洗技术的发展仍是一项颇具挑战性的艰巨任务。
□
