面向WSNs节点数据采集的无人机Voronoi图路径规划
2021-11-02江媛媛黄登唐国民邹炎华
江媛媛 黄登 唐国民 邹炎华
摘要:长江中游航道自然条件复杂,滩多水浅、航道弯曲、水流湍急、流态紊乱、船舶流量大、船舶密度大,呈现出“浅、窄、弯、曲”四大特点,长江航道传统的业务管理模式主要是依靠船艇,而船艇呈“带状”模式巡检,视野窄、耗时长等短板日益凸显。面对长江中游典型航道特征,近年来,随着无人机(UnmannedAerialVehicle,UAV)技术的发展,因其灵活度高、机动性强、安全风险系数小、成本低等特点,被广泛应用于搜索巡逻、侦察监视、抢险救灾、物流配送、电力巡检、农业灌溉等军用或民用任务,无人机作为“会飞的照相机”,在航道巡航过程中视野可呈几何数量级放大,既能将大面积区域内的航道、航标、整治建筑物的分布情况一览无余,又可通过摄像头变焦对某个点的细节进行放大查看。因此,无人机在对航道助航设施巡检、航道水域环境保护、水尺水位观读等方面可充分发挥其高效迅速、机动性强、点面结合的突出优势。与单架无人机相比,多无人机协同工作具有鲁棒性好、容错性高等独优势,不仅能够完成单架无人机无法完成的复杂任务,而且在部分无人机出现故障时,只需重新规划剩余无人机即可继续执行任务,从而达到优化任务执行效果和提高系统可靠性的目的.路径规划是无人机执行任务的关键,也是自主无人机在工程应用上的主要挑战,吸引了国内外学者的广泛关注。基于此,本篇文章对面向WSNs节点数据采集的无人机Voronoi图路径规划进行研究,以供参考。
关键词:面向WSNs节点;无人机;Voronoi图路径规划
引言
近些年,无人机因其可操作性、高机动性、灵活性以及经济性等特点被广泛应用于军事和民用领域。例如,在民用领域,无人机用于执行救灾救援、环境研究、天气预报以及农业监控等任务;在军事领域,无人机能够在危险复杂区域飞行,并利用装载的摄像机或其他侦察设备获取多种形式的目标信息,有效降低了人力资源损耗,且能够更高效地执行侦察任务。为了实现不同任务目标,需要对无人机进行合理的路径规划。路径规划问题通过规划无人机的飞行路径,使其可以在约束条件下完成指定的任务。
1WSNs
无线传感网络(WirelessSensorNetworks,WSNs)已在多个领域广泛使用,如天气监测、康复医疗、动物跟踪。WSNs内多个传感节点感测环境数据,再将数据传输至基站,进而实现对环境的监测。然而,由于受资源限制,如能量、安全,数据传输的可靠性仍存在挑战。为了提高数据传输的可靠性,研究人员进行了大量的研究工作,并提出基于转发节点的协作转发方案。例如,分析转发节点对数据传输的影响。此外,通常WSNs内的节点是由电池供电,属于有限能量。一旦能量消耗殆尽,节点就无法感测、接收和传输数据,这就降低了数据传输的可靠性。能量采集是缓解WSNs能量短缺问题的有效技术。
2Voronoi图
Voronoi图是计算几何领域中的一个重要内容,在空间查询等相关研究领域中得到了较多关注。此外,Voronoi图与Delaunay三角剖分互为对偶图的关系已被广泛地应用。Voronoi图可以很好地表示空间数据的邻近关系,同时具有矢量以及连续平铺数据模型的基本特性,可以对空间数据进行很好地管理。
3多旋翼无人机技术特点
(1)机动性强。目前先进的多旋翼无人机可以达到140km/h的速度,百公里加速仅需2s,可以在7s之内上升到100m高空,进行空中作业不受地形限制,同时对起降条件的要求较低,只需要一个相对较小的平面例如石墩、车顶就可以作为起降平台。根据操作员所处空间环境和磁场条件不同,可覆盖半径3~10km高度达500m的监测区域,并且在车船等移动平台上,操作员作为中心还可以将此覆盖面积无限延伸。(2)安全性高。多旋翼无人机可以在阴天、低雾等环境下升空作业,采集大量监测数据,尤其在水旱灾害现场,操作人员可以选择较为安全的区域对无人机进行操控,最大限度保障了人身安全,即使无人机故障,也可最大限度地避免人员伤亡,降低损失,具有较高的安全性。(3)采集数据多样化。多旋翼无人机主要通过携带高清影像采集设备采集地面图像,并且可以实时传输现场情况,有利于防汛抗旱减灾的及时决策通过搭载一体式多光谱成像系统、热成像传感器、环扫毫米波雷达、RTK(Real—timekinematic,实时动态)模块、探照灯、喊话器等不同功能模块及设备可以实现不同应用场景的多样化数据采集传输,能夠应对各种复杂困难局面。
4面向WSNs节点数据采集的无人机Voronoi图路径规划
4.1传输能耗
4.2VDO-UAV算法
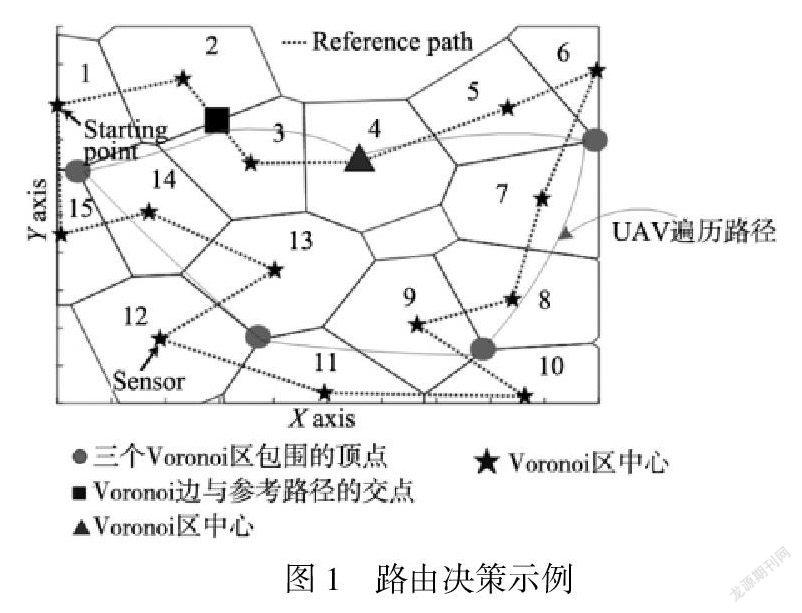
1)首先沿参考路径,从始点对Voronoi区进行编号,如图1所示,沿着参考路径,对15个Voronoi区进行编号。(2)利用L(hmax),L(hmax-1),…,L(1)决策UAV盘旋的位置。具体而言,当h≥4时,所有区中心位置(h)∈L(h)都作为UAV盘旋的位置;当h≤3时,就寻找3个Voronoi区所包围的Voronoi顶点,并将这些顶点作为UAV盘旋的位置,如图1所示的红色圆点。第5、6、7个Voronoi区包围一个顶点,
如算法1的9~12行所示。(3)只剩余孤立的Voronoi区(h=1),在这种情况下,就将该孤立的Voronoi区的中心位置作为UAV盘旋位置,如图1所示的Voronoi区4。如算法1的17行所示。
结束语
总而言之,针对WSNs的数据收集问题,提出基于Voronoi图的无人机路径规划VDO-UAV算法。仿真结果表明,提出的VDO-UAV算法缩短了遍历路径。
参考文献:
[1]王正才,彭红.面向WSNs节点数据采集的无人机Voronoi图路径规划[J].组合机床与自动化加工技术,2019(09):67-70+74.
[2]王钦禾,尹永鑫,戴丽,邹宇翔.基于Voronoi图和蚁群算法的无人机航迹规划[J].导航定位与授时,2019,8(02):66-73.
[3]陈香敏,吴莹.基于Voronoi图的UAV攻击多移动目标的路径规划算法研究[J].信息通信,2019(06):36-37.
