水果采摘机器人运动控制系统的设计与实现
2021-11-02高强
高强
摘要:农业生产需要投入大量人力,但是过高的人工成本又会影响农业经济发展。而且,水果是季节性产品,需要在短时间内要求大量人参与到采摘工作,在其他时间则不需要这么多人力。为此,需要积极摸索机械生产,降低水果采摘所需的人力支出。本文从水果采摘这一农业生产需求出发,对于机器人运动控制系统展开设计,旨在为我国农业经济发展贡献力量。
关键词:水果采摘;机器人运动控制;系统设计
前言:传统人工采摘水果,需要在几天内支付劳动者大量资金,影响水果种植盈利空间。为有效降低成本支出,采摘机器人已经变成农业发展关注要点。对于水果采摘,要求在树枝中识别成熟水果,将其采摘,并在不同果树之间进行移动,是一项系统性工作。本文针对机器人运动这一模块进行设计,希望可以为更多机器人研发企业提供研发思路。
1运动控制机械机构
对于水果采摘,主要涉及到在水果采摘与果园移动两个部分。对于采摘部分,使用可以实现提升、中轴旋转的机械臂,在控制器引导下,可以让机械臂在树枝之间顺利采摘水果,而不对果树造成过多影响。而且,在机械臂的末端需要设计剪断茎干的剪刀,并使用气缸对剪刀开合进行控制。先由夹子固定水果,再完成果实采摘。而移动部分则要考虑不同水果的果树高度会存在差异,而且果实高度也会存在差异。所以,需要利用传感器检测距离机器人最近的果实位置,并驱动机器人移动至果实下方。将机器人负责移动的四个轮子构成矩形,以对角线的交叉位置设置成原点,以此构建直角坐标系。同时,需要在轮子上增加传感器,保证机器人在移动时可以依照坐标系完成多角度移动。例如轮子的初始位置是0°,即机器人停止当前运动;在轮子角度为正90°,则会发生反向旋转,从而达到机器人移动目的。
2水果采摘机器人运动控制系统设计
2.1 GPS定位
为在水果采摘过程中,实时掌握机器人当前位置,需要通过GPS定位系统获取相应数据。数据传输则要以GPS信息格式为准,从而对机器人位置信息采集,对数据进行处理。在该系统的数据协议中涉及到帧头、帧尾、数据信息、位置检测四个部分,需要于系统内预先经过智能化处理,才能让数据传输保持较高效率,降低干扰信息影响。所以,采集数据需要先串口数据传输情况进行判定,如果是失败,需要从程序中退出,如果是成功,需要在帧头位对GPS标识符检测;然后,对已接收字符进行循环,判别标识符内位置信息是否有效,有效会继续等待其他帧传输,无效会终止当前行为;在对接收数据后,认定该内容是帧尾位,则会返回数据。如果不是帧尾位,会在已接收数据转移至缓冲区的同时,继续接收剩余数据内。GPS系统在检测数据完整性时,发现数据和字节标准不符,需要舍弃数据。
2.2超声波测量
超声波测量系统是由机械臂前端传感器和水果测量两者之间距离,并把超声波通过反射测量获得距离信息运输给数据单元。测量数据除水果和传感器位置外,也涉及到机器人的移动速度、机械臂角速度等数据,并以数据帧方式于系统内传输。在发送数据帧前,需要判断数据发送情况,无数据传送时,需要等待数据;而已经开始进行传输数据,需要對帧头真实性判断,只有符合系统预测信息的数据,才能将其转移至缓冲区内,并根据缓冲数据对传感器与水果完成距离运算。如果不符合要求,则会将接收到数据丢弃,等待其他数据进入系统。
2.3视图系统
对于视图系统,这是机器人采摘设计最重要内容。其目的是处理传感器收集到的图像信息,并对采摘目标进行准确处理。视图系统需要保证数据信息真实,并在视图系统中判断采摘对象,完成超声波测距后,进行机械臂的采摘动作。基本原理是由机械臂前端的摄像头对果实收集图像信息,从而确定果实实际方位,由超声波测距确定具体采摘位置,在系统中控制机械臂的高度,设定采摘角度,并合理调节运动速度,通过设置剪刀、夹子的执行器负责采摘工作。对于视图系统的设计过程,需要保证对操作目标检测其是否存在,以分析其具体空间位置,确定坐标,利用机器人与执行器距离,借助视图导航,完成机器人行为引导。
3基本功能测试
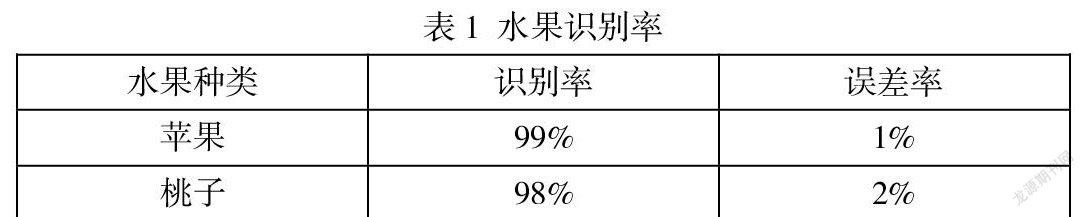
负责辅助机器人在果园内移动的GPS定位系统,与确定果实在树上具体位置的超声波测距系统,两者在实际应用时都可以将误差值控制在较低范围内。少数测试时可以达到精确采摘水果效果。为提升采摘准确度,需要通过视图系统识别果实模型。在测试时主要以果实规格、边缘特性等和周边树枝、树叶进行区分。例如圆形苹果与扁平状树叶,机器人则是处理前者,避开后者。如果是水果规格过小,机器人分辨准确度会有所下降。对于常见的几种水果测试后,例如苹果、桃子等,其识别效率均在98%以上,如表1所示。
结论:本文对于采摘机器人仅涉及到运动模块,若要正式投入应用,还需要对图像识别、障碍物判定等多种系统模块进行研究。所以,在参考本文内容时,请依据实际水果采摘条件为主,优化设计工作。避免出现直接照搬本文内容,影响机器人实际工作效果。
参考文献:
[1]李荣,栾贻青,王海鹏,等.全向四驱变电站巡检机器人运动控制系统设计[J].机床与液压,2020,506(08):117-121.
[2]罗沛.试论自主移动机器人运动控制系统的设计及实现[J].大科技,2020,000(007):219-220.
[3]赵旭,耿瑞焕.采摘机器人数字视频监控系统—基于DSP和帧内编码[J].农机化研究,2020,42(08):242-246.
作者简介:1997年10月生,男,汉族,宁夏固原人,研究方向:智能控制技术
课题:宁夏大学生创新创业项目“自动化水果采摘机器人”(2018-D26)
