基于EDEM的垂直螺旋式排肥器性能模拟试验*
2021-11-02王鹏宇梁春英张荣丹邹立雯李圳鹏
王鹏宇 ,梁春英 ,李 普 ,张荣丹 ,邹立雯 ,李圳鹏
(1.黑龙江八一农垦大学信息与电气工程学院,黑龙江 大庆 163000; 2.黑龙江八一农垦大学工程学院,黑龙江 大庆 163000)
0 引言
落后、不合理的施肥方式对农业可持续发展造成了严重威胁,影响我国农产品产量和质量的提高[1]。研究和实施高产低耗、优质高效的精准施肥技术,能够减少肥料施用量、降低对环境的污染、提高资源利用率,实现资源投入的科学化与产出值的最大化[2]。当前,农业生产中常见的排肥器类型主要有外槽轮式、螺旋式、离心式、星轮式等。螺旋式排肥器相对于其他类型的排肥器,具有兼施粉末状和颗粒状肥料的优势;而且对肥料物理特性要求也较低;结构简单且易于调节排肥量大小[3]。螺旋式排肥器输送物料时,根据螺旋不同的安装结构,可分为水平式、倾斜式以及垂直式输送模式,而垂直螺旋式排肥器在有效重力的作用下,其物料输送效果的流动性和均匀性更佳,有利于提高施肥稳定性和排肥均匀性[4]。
离散元法(Discrete Element Method,简称DEM)是一种基于非连续介质力学理论特性的数值计算方法,采用动态松弛法、牛顿第二定律、中心差分法和时步迭代来求解每个颗粒的运动和位移,因其较高的可靠性以及简洁的算法,被广泛应用于研究复杂离散系统的运动规律当中[5]。该方法近年来在农业工程领域被众多学者研究应用,如土壤与机械的相互作用、肥料颗粒与机械的相互作用等过程的研究已经取得了很多成果[6]。
本研究以垂直螺旋式排肥器和肥料颗粒为研究对象,利用SolidWorks软件和EDEM软件分别建立排肥器模型和肥料颗粒的离散元模型,然后对其排肥过程进行仿真模拟,分析颗粒自身和颗粒间、颗粒与各接触器件的运动规律,以及对排肥量的影响程度,为后续优化装置结构和排肥效果提供参考依据。
1 仿真模型及参数确定
1.1 垂直螺旋式排肥器模型
垂直螺旋式排肥器主要由以下7个部分构成,即驱动电机、联轴器、肥箱、螺旋叶片、排肥轴、排肥护管和排肥口,如图1所示。其中,肥箱尺寸为350 mm×300 mm×260 mm。综合考虑目标施肥量(60 kg/h~135 kg/h)及肥料物理特性等因素,依据文献资料[7]和经验公式进行计算,取螺旋轴外径为34 mm,内径设定为10 mm,螺距取值范围为27 mm,螺旋转速设定为152 r/min。
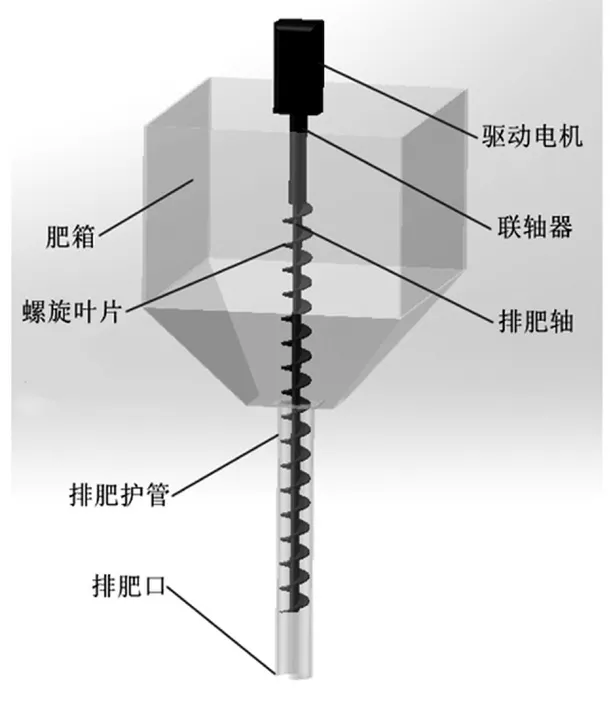
图1 垂直螺旋式排肥器模型
1.2 肥料颗粒离散元模型
肥料颗粒的形状和密度直接影响其在排肥机构中的运动情况和排肥效果,为了使肥料颗粒的排肥过程更贴近工程应用实际,课题组以大颗粒尿素为研究对象,随机抽取100粒,采用游标卡尺测量其三轴尺寸,结果取平均值,通过公式求解出颗粒的几何等效直径与球形率。经计算,长度平均值为4.17 mm,宽度平均值为3.96 mm,厚度平均值为3.79 mm,尺寸符合正态分布,等效直径平均值为3.96 mm,尿素颗粒的球形率为94.96%,形状近似球体。利用EDEM软件建立长、宽、高均为4 mm的尿素颗粒离散元模型,如图2所示。

图2 尿素颗粒离散元模型
1.3 仿真参数确定
目前,EDEM软件包含多种接触模型:Hertz-Mindlin热传导模型、Hertz-Mindlin无滑动接触模型、Hertz-Mindlin黏结模型、Linear Cohesion接触模型等[8]。此仿真试验材料为肥料颗粒,可以将其考虑成刚性体、无弹塑性变形,所以选择的接触模型为无滑动接触模型(Hertz-Mindlin),该模型计算精度高、速度快,是描述无黏性颗粒间接触、碰撞行为的最常用接触模型[9]。将此前建立的排肥器模型以igs格式导入EDEM求解环境中,同时,设置排肥器的所有部件材料均为碳钢Q235,有关仿真参数可通过实际测量以及参考文献[10]获得,如表1所示。
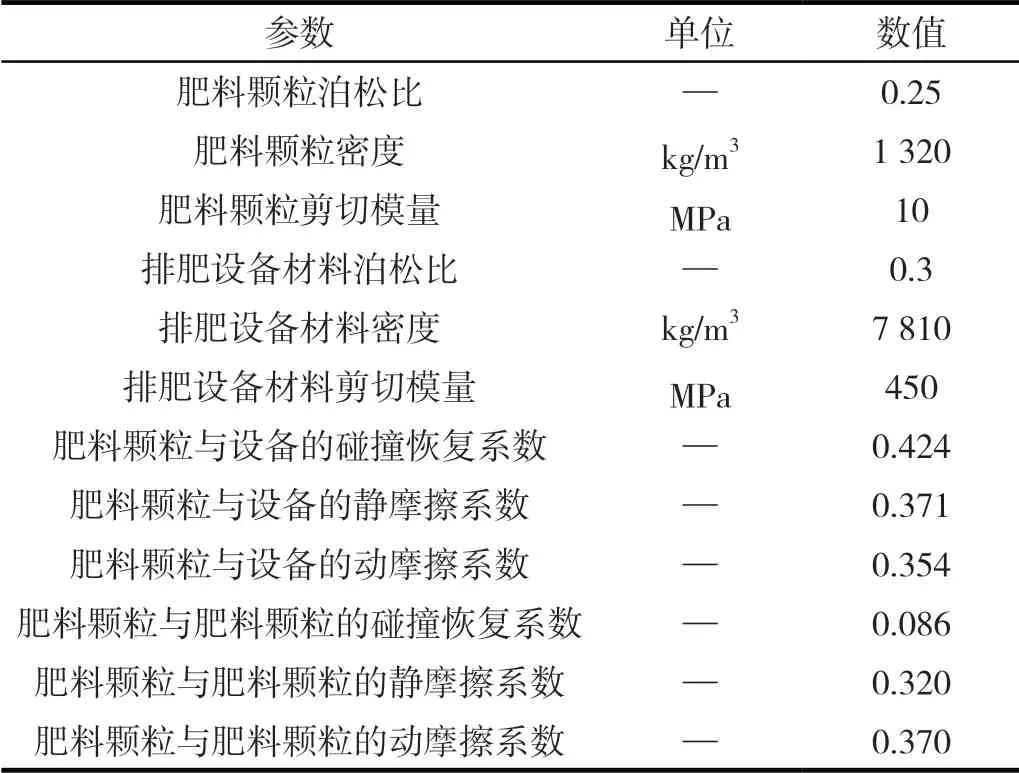
表1 模型仿真参数及其数值
2 仿真试验与分析
2.1 试验设计
在仿真试验开始之前,设置计算时间步长为瑞利时间步长的20%,仿真时间为20 s,每0.1 s保存1次数据;颗粒工厂设置在肥箱顶端,肥料颗粒0 s时开始生成,生成速率为每秒20 000颗,在重力作用下自由下落,共生成120 000颗肥料颗粒;仿真网格为2倍的颗粒半径;在所有颗粒全部生成后,排肥螺旋开始转动;在排肥口下方设置有长、宽、高均为300 mm的肥料收集区域。将出口处肥料颗粒的速度和受力着不同颜色,其中浅色代表速度和受力值最大,深色代表速度和受力值最小。仿真结束后,可通过EDEM后处理功能获得肥料颗粒的运动轨迹、速度变化及质量变化等相关数据、曲线图。
2.2 肥料颗粒运动过程仿真分析
EDEM软件为了方便使用者对单个颗粒运动状态开展研究,将颗粒工厂生成的颗粒进行自动编号,仿真计算结束后随机选取第15 715号肥料颗粒进行分析。
单个肥料颗粒运动轨迹图如图3所示,单个肥料颗粒受力随时间变化曲线图如图4所示。由图3及图4可知:15 715号肥料颗粒在0.4 s由颗粒工厂生成并开始下落;0.4 s~1.0 s内,肥料颗粒的速度先增大后减小,0.6 s时速度达到最大值0.724 m/s,在1.0 s时速度减小为0.008 m/s,颗粒最终掉入排肥箱内并停在肥料群上;1.0 s~6.0 s内,由于颗粒之间无明显运动,肥料颗粒速度变化不大,变化范围在0.004 m/s~ 0.019 m/s之间;6.0 s~9.6 s内,肥料颗粒开始随着排肥螺旋进行旋转运动,在其他颗粒挤压和螺旋转动作用下,该肥料颗粒速度持续波动,在6.1 s时速度达到最大值0.11 m/s;在11.7 s时,肥料颗粒从排肥螺旋脱出进入排肥护管末端且速度迅速增大;在11.9 s时,肥料颗粒速度达到最大值0.588 m/s,随后碰到地面后速度开始下降,最终下降为0,完成肥料颗粒的排出。
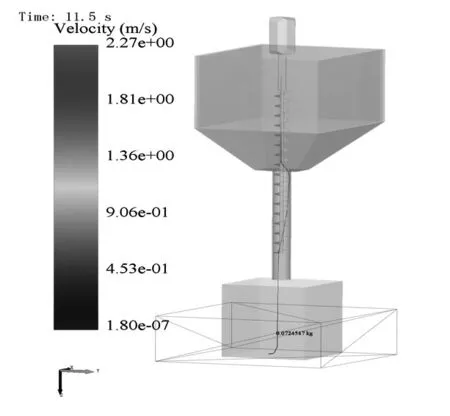
图3 单个肥料颗粒运动轨迹图

图4 单个肥料颗粒受力随时间变化曲线图
该排肥器模型在第10 s时的仿真状态图如图5所示,可见肥料收集区域已经堆积有0.024 kg肥料,肥箱以及排肥护管中有螺旋轴部分的肥料颗粒速度较低,排肥护管末端及将要落地的肥料颗粒速度较高。
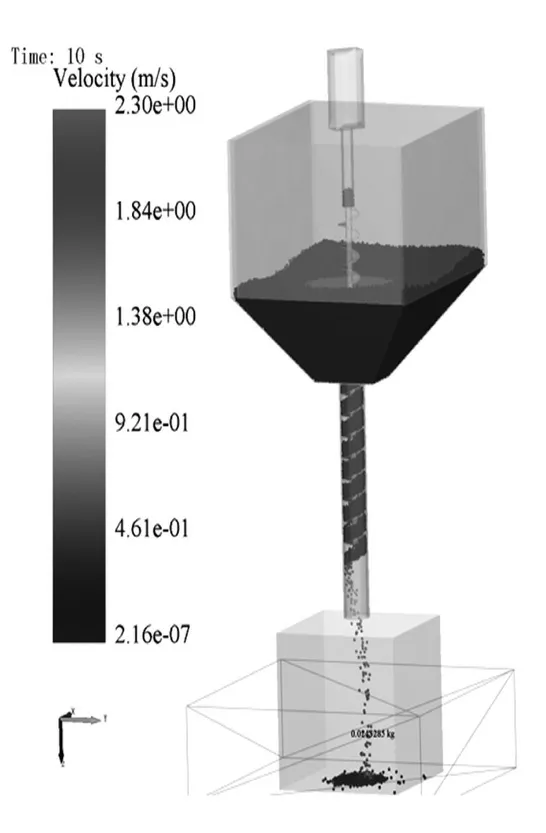
图5 仿真模型第10 s时状态图
肥料收集区域肥料质量随时间变化曲线图如图6所示。由图6可知,肥料收集区域在前8.8 s无肥料颗粒进入,自8.8 s时开始,有肥料落入,且该区域收集到的肥料质量随着仿真时间的推移而逐渐增大,最终达到肥料质量与时间呈现正比例关系的稳定状态。
3 结论
课题组以建立的垂直螺旋式排肥器模型和肥料颗粒的离散元模型为研究对象,对排肥器的排肥过程进行仿真模拟,得到肥料颗粒从颗粒工厂生成到进入肥箱、随排肥轴进行运动、排出排肥管落到地面的运动状态。利用EDEM软件强大的仿真后处理功能,获得肥料颗粒的运动轨迹、速度变化及质量变化等相关数据、曲线图,可知排肥器整体运行达到设计效果,满足设计要求。